在工业4.0的浪潮中,协作机器人正以惊人的灵活性重塑生产线------它们与工人并肩作业,精准搬运零件,完成精密装配。还能协同医生完成手术,甚至制作咖啡。
标准的协作机器人关节模组由角度编码器、直驱电机(DD马达)、驱动器、谐波减速机、刹车、扭矩传感器等元器件组成,DD马达摒弃了传统减速机构,将负载与电机转子直接耦合,成就了协作机器人流畅的关节运动。但这一革命性设计
也带来了严苛的精度挑战:任何微小的角度偏差都被直接放大为末端执行器的轨迹误差!
当协作机器人需要执行微米级的精密任务时,一个隐形挑战浮出水面:如何确保其核心动力单元DD马达的旋转精度达到角秒级?答案藏在一束激光的干涉条纹之中。
中图仪器解决方案:
SJ6000激光干涉仪+角度反射镜组+WR50自动精密转台,测量精度:±1″;分辨力:0.01″。
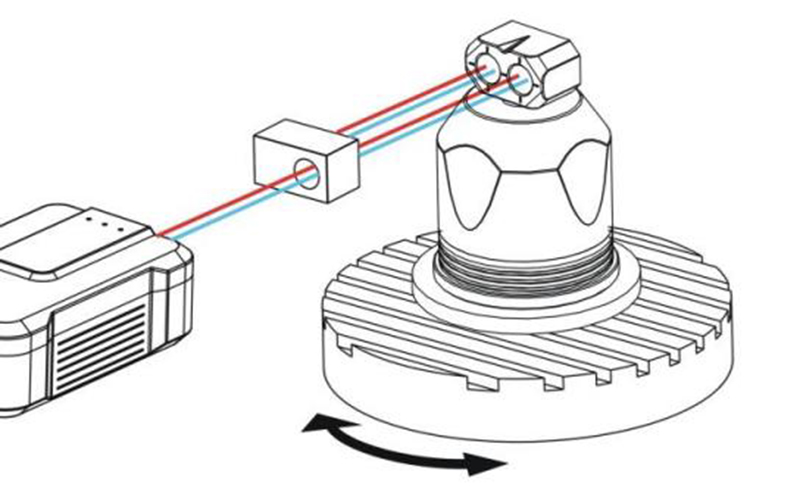
DD马达旋转角度测量示意图
测量流程:
将WR50自动精密转台固定在马达轴心,其顶部反设镜可相对基座反向旋转,反射镜始终与激光束角度锁定在0.5度内,转台每旋转5°,反射镜即反向旋转5°,此时软件将WR50的精密圆光栅角度值和SJ6000的角度值进行合并计算,得出马达实际转动的角度。


激光干涉仪测量结束后自动进行补偿,确保DD马达旋转精度符合要求。

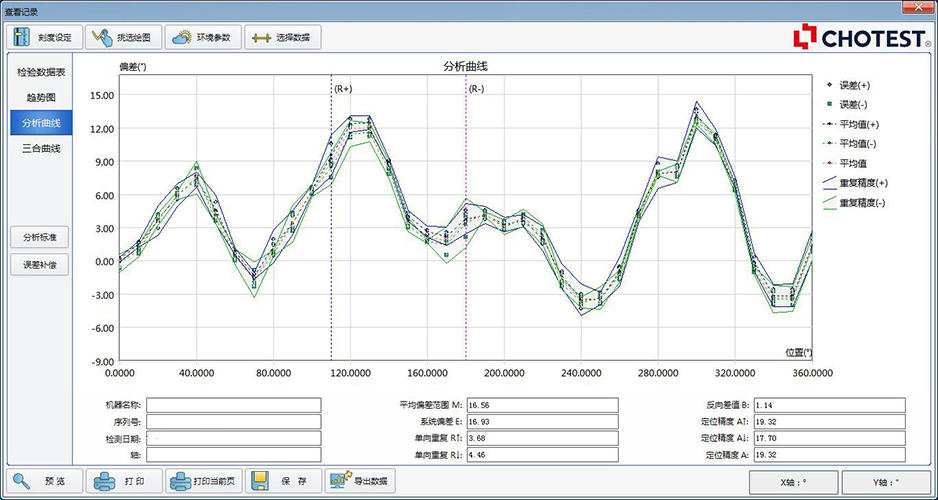
补偿前数据
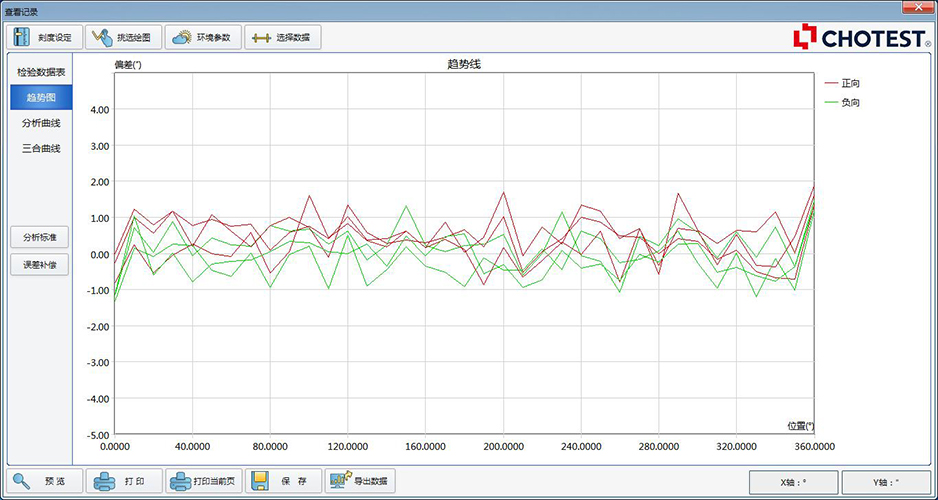
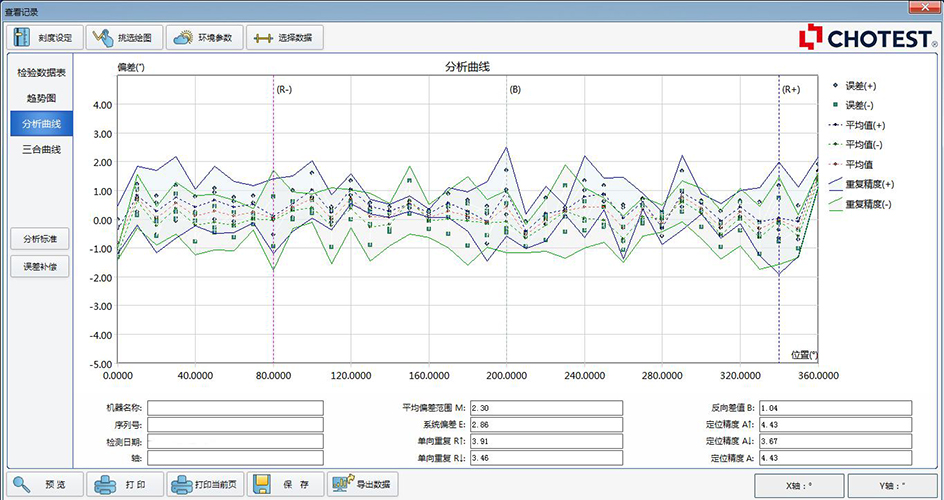
补偿后数据
从汽车工厂的装配线到无尘室里的芯片制造,协作机器人正以人类般的灵巧重塑产业。而在这背后,是以激光干涉仪为代表的精密测量仪器的默默守护,为协作机器人的安全高效精准运行保驾护航。