前文回顾👉 什么是具身智能?
人形机器人是具身智能领域的代表,自从1972年早稻田大学研制出世界上第一款全尺寸人形智能机器人为止已有50多年的发展历史,而近几年大模型的发展给人形机器人增加了新的发展引擎,不仅相关技术得到快速发展,入局玩家增多,而且更是国家科技实力竞争的关键。

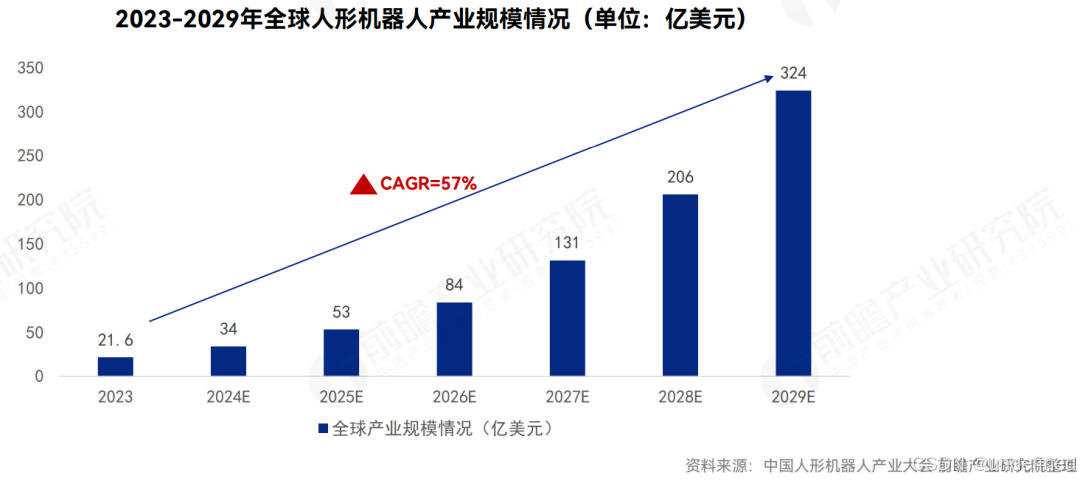
人形机器人前景广阔,高盛在2022年11月的一份报告中预估,在未来10到15年内可以实现至少60亿美元的人形机器人市场,甚至在最理想的情景下2035年人形机器人市场或将达到1540亿美元。另外,Markets and Markets也对人形机器人市场进行了报告,预测人形机器人市场规模将从2023年的18亿美元增长到2028年的138亿美元,其复合年增长率可达50.2%。
本文主要介绍构造人形机器人肢体的核心零部件,核心零部件不仅所占整个机器人的成本之高,而且技术壁垒极高,是人形机器人十分重要且关键的组成部分。
概述
机器人是感知、决策、行动和交互技术的结合,可以看作由传感部分、控制部分和机械部分组成。
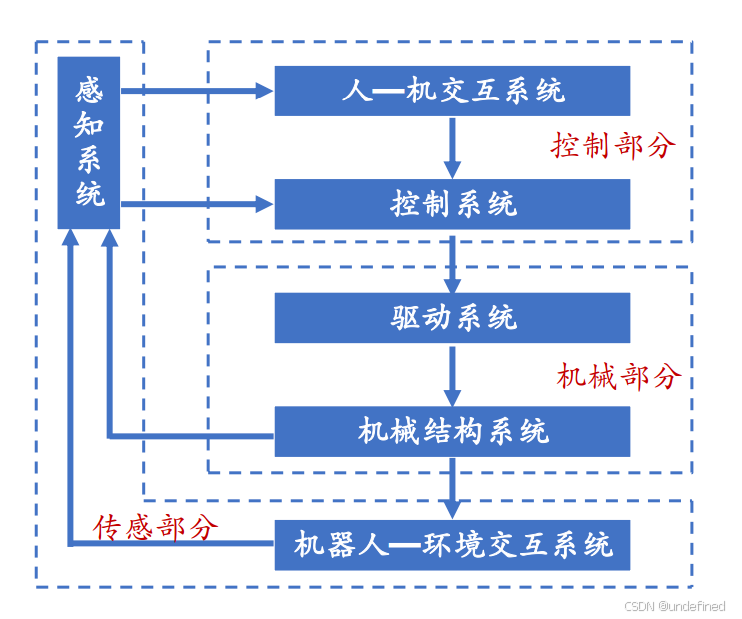
机器人系统构成部分--from自动控制网
而机械部分则说由多个核心零部件所构成,例如减速器,空心杯电机,伺服电机,传感器等等。
核心零部件在整个机器人产业链都占有重要的地位,原因其一是在技术方面,高性能的核心零部件是实现感知与运动的基础,尤其是人形机器人要求有接近人类的感知与运动能力,对核心零部件极高;
其二是在成本方面目前核心零部件占总制造成本较高,据东方财富证券统计,2022年我国机器人三大核心零部件精密减速器、伺服电机、控制器的成本占比分别为32%、22%和12% ,核心零部件制造成本占工业机器人总制造成本的近70%。可见核心零部件对于机器人的重要性,这也导致现在一个人形机器人的价格还是比较贵的,人形机器人要想以后走进普通家庭,实现核心零部件的自主可靠和国产化,降低制造成本是很有必要的。
核心零部件介绍
核心零部件主要是**减速器,空心杯电机,伺服电机,传感器。**人形机器人的蓄势待发也促进了国产核心零部件得到快速发展,市场和资本都十分看好核心零部件的发展前景。
◼减速器
精密减速器主要用于机器人各个关节,负责将伺服电机输出的高速运转动力转化为低转速、高转矩的运动,决定机器人的精度和负载。 一般传动减速器控制精度低,可满足机械设备基本的动力传动需求。精密减速器精度较高、使用寿命长,更加可靠稳定,应用于机器人、数控机床等高端领域,包括谐波减速器、RV 减速器、行星减速器等,其中应用最广泛的是用于重负载转传动的RV 减速器和用于轻负载传动的谐波减速器。
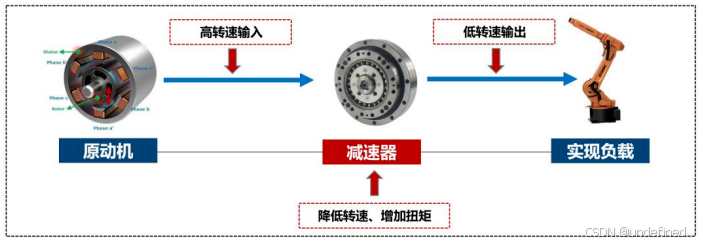
减速器基本功能原理--from国信证券
**行星减速器结构简单,减速比较低。**精密行星减速器体积比较小,结构较为简单,主要包括行星轮、太阳轮和内齿圈。精密行星减速器传动比都在10以内,且减速级数一般不会超过3级,相较于其他减速器启动更加平稳,且刚性、精度和扭矩高,主要搭配步进电机和伺服电机,用以降低转速,提升扭矩。
精密行星减速器具有卓越的刚性、高精度和高扭矩传递能力。精密行星减速器主要应用于步进电机和伺服电机,用于减小转速并提高扭矩输出。这种减速器广泛应用于工业机器人、精密机床、医疗设备等领域。
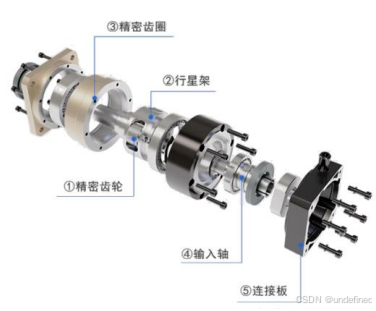
行星减速器结构--from川铭精工官网
**谐波减速器结构简单,减速比大,传动精度和传动效率较高。**谐波减速器主要由3个基本部件构成:刚轮、柔轮、谐波发生器,工作原理是通过柔轮的周期性波动变形,迫使柔轮和刚轮之间的少齿啮合,从而实现动力和运动的传递。
谐波减速器最初运用于航天航空装备领域,现在已迅速扩展到其他领域,包括仪器仪表、机床、仿生学(机械手、机器人、假肢)、医疗器械、能源、光学系统和原子反应堆等。这种广泛的应用领域使得谐波减速器成为一种非常有价值的传动装置。
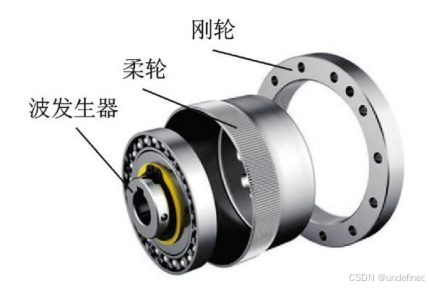
谐波减速器结构--from知网
**RV减速器结构较为复杂,承载能力强,传动精度高。**RV减速器是以摆线针轮行星传动为基础发展而来的。RV减速器主要包括两级传动装置,分别为渐开线行星齿轮传动和摆线针轮行星传动。
RV精密减速器具有很高的疲劳强度、刚度和寿命,最大的特点是回差精度稳定,不会像谐波减速器那样随着使用时间的增加运动精度会显著降低,因此满足类似机器人关节等对运动精度要求长期稳定的传动场合。除了机器人领域,RV减速器也广泛运用于医疗和军事等工程领域。
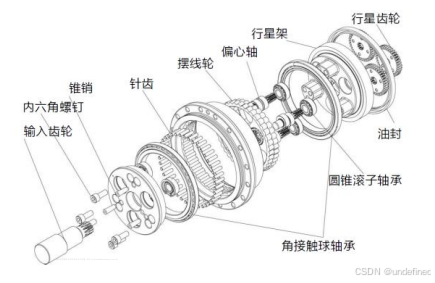
RV减速器结构--from鑫松自动化官网
◼ 空心杯电机
空心杯电动机属于直流永磁的伺服、控制电动机,也可以将其归类为微特电机。空心杯电动机具有突出的节能特性、灵敏方便的控制特性和稳定的运行特性,技术先进性十分明显。
空心杯结构上突破了传统电机的转子结构形式,采用的是无铁芯转子(空心杯型转子),彻底消除了由于铁芯形成涡流而造成的电能损耗,同时其重量和转动惯量大幅降低, 从而减少了转子自身的机械能损耗,电机性能得到极大改善,节能,具备了铁芯电动机所无法达到的控制和拖动特性。
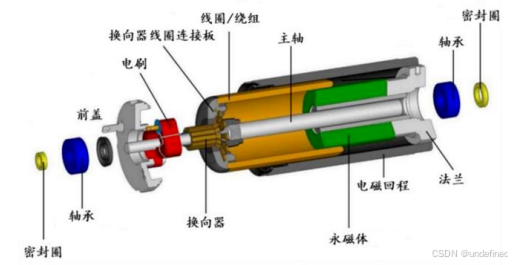
空心杯电机结构
空心杯电机分为无刷空心杯电机和有刷空心杯电机。
(1)无刷空心杯电机:直流无刷无齿槽电机,行业内通常称为"无刷空心杯"。通过电子换向,高转速,寿命更长,但有铁损,需要驱动控制。
(2)有刷空心杯电机:直流有刷无铁芯电机,行业内通常称为"空心杯",一般来说,国内的"空心杯电机" 指有刷,通过机械换向,转速受限,寿命受限,无铁损,控制相对简单。
空心杯电机应用广泛,包括医疗器械、航空航天、机器人等领域。
◼ 伺服电机
机器人的运动控制主要通过控制器和伺服系统共同完成,而伺服系统主要包括伺服驱动器和伺服电机。
伺服系统主要包括伺服驱动器和伺服电机,是工业自动化设备的"神经系统"。伺服行业下游应用行业随高精密设备需求的不断提升,实现了从纺织、包装、印刷等传统领域向电子设备制造、工业机器人等新兴领域的转移。
**相较于通用伺服,机器人用伺服系统对性能等各方面要求更高。**机器人伺服系统通常指用于多轴运动控制的精密伺服系统,其对伺服系统的反应速度、体积、性能等诸多方面均提出更高的要求。
**伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。**伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
伺服电机分为交流伺服和直流伺服两大类。
交流伺服电机和直流伺服电机都是常见的伺服电机类型,它们之间的主要区别在于驱动电源和控制方式。交流伺服电机通常使用交流电,而直流伺服电机使用直流电。此外,交流伺服电机结构相对简单,控制方式也较为灵活,因此广泛应用于对精度、速度和力矩有较高要求的场合,例如机床、印刷设备等。
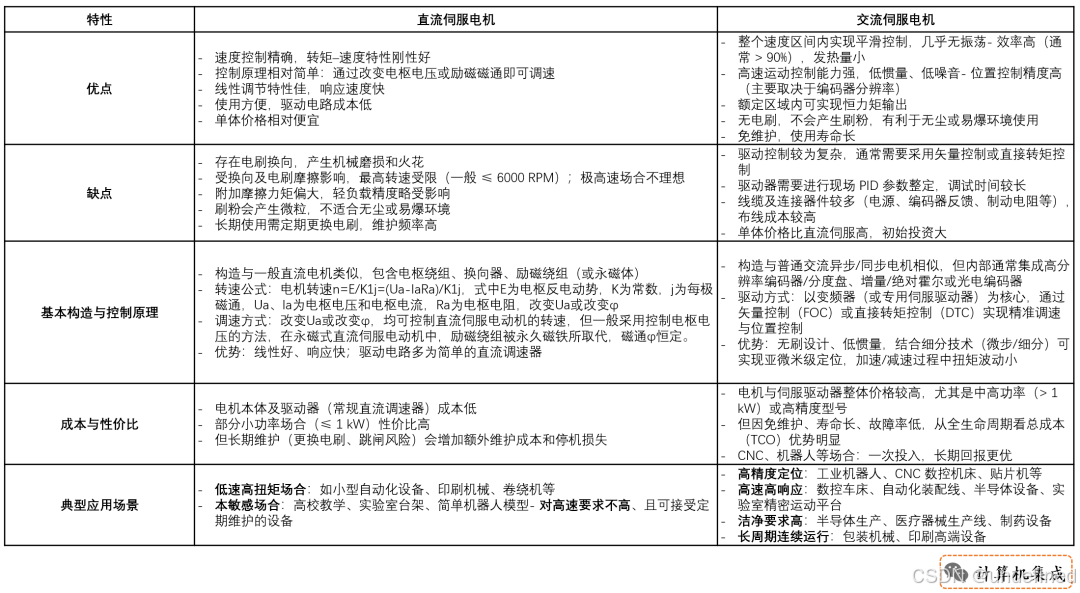
交流伺服电机和直流伺服电机对比
◼ 传感器
机器人外界环境感知与智能化提升依赖高性能传感器。 机器人使用的传感器大致包括视觉传感器、力/力矩传感器、触觉传感器、惯性传感器(IMU)、流量传感器等,传感器是机器人实现外界环境感知和交互的关键,其中视觉传感器是机器人的"眼睛",力/力矩传感器是机器人的"肌肉神经",触觉传感器是机器人的"皮肤"。
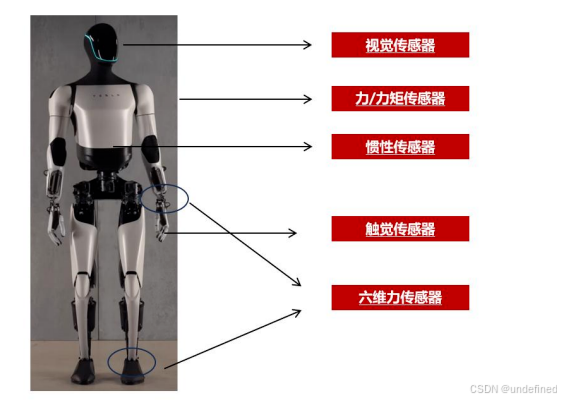
机器人的传感器--from西南证券
传感器的作用是获取人形机器人内部和外部的环境信息,并把这些信息反馈给控制系统,与工业机器人相比,人形机器人对交互、导航、避障等功能的要求更高,对传感器的要求也更高。
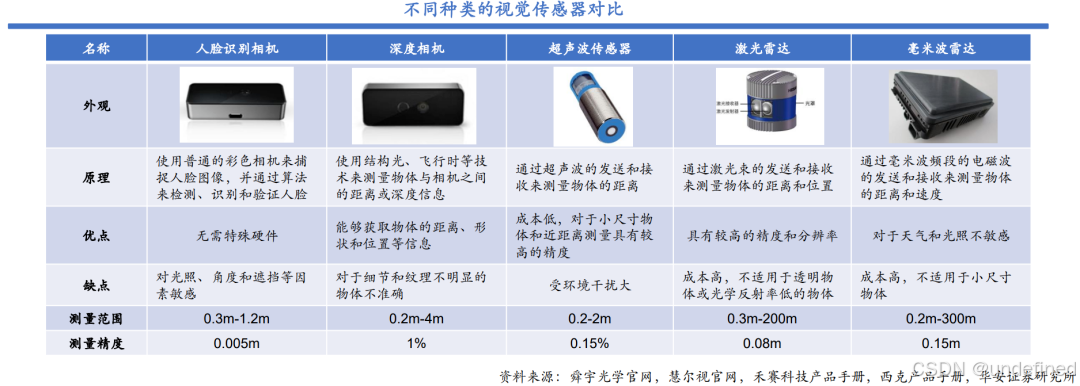
人形机器人的所用的传感器种类繁多,以视觉传感器为例,人形机器人的视觉传感器就包括摄像头、超声波传感器、 激光雷达和毫米波雷达等类型,它们共同构成人形机器人的视觉。
未来发展
人工智能与机器人的快速发展也带动了国内机器人核心零部件的发展,虽然在国产核心零部件方面与国际先进产品还有些差距,但是差距逐渐缩小,并且在各个领域都诞生了行业内有影响力的企业,比如谐波减速器方面有龙头代表绿的谐波 ,空心杯与行星减速器有兆威机电 和鸣志电器 ,伺服系统有汇川技术等等。
随着大模型的爆火,让发展多年的机器人行业也焕发出新的生命力。现在国内的深圳,上海和北京等城市都相继出台各种政策大力支持机器人产业的发展,国际巨头如特斯拉等也纷纷布局人形机器人。这对于核心零部件产业是极好的良机,在这美好时代可以继续加大研发投入,找到和加深自己的技术优势,同时加强与国内外产业链合作伙伴的交流与合作,相信行业也会越来越好!
机器人核心零部件行业难度大,前期研发和时间成本投入高,要在这个领域站稳脚跟需要坚守一定的初心和情怀,也要坐得了冷板凳 。目前站在风口上的一些优秀企业实际上也是历经多年探索,期间也经过不少挫折,今天也终于在人工智能与机器人时代守得云开见月明,它们是了不起的!
结语
核心零部件是人形机器人制造成本的大头,当核心零部件国产化加速并取得一定成就,人形机器人"白菜价"的那一天也就快要来临了,就像现在人人都有一部智能手机一样,以后家家户户都有一个人形机器人也会变得越来越平常!
参考资料:
-
西南证券
-
中国信通院
-
华安证券
关注一下,后续有更多精彩内容~
