Application startup
在大多数嵌入式系统中,进入 main 函数之前需要执行一段初始化序列来设置好系统环境。下图展示的就是这段初始化序列的默认流程:
Figure 1. Default initialization sequence
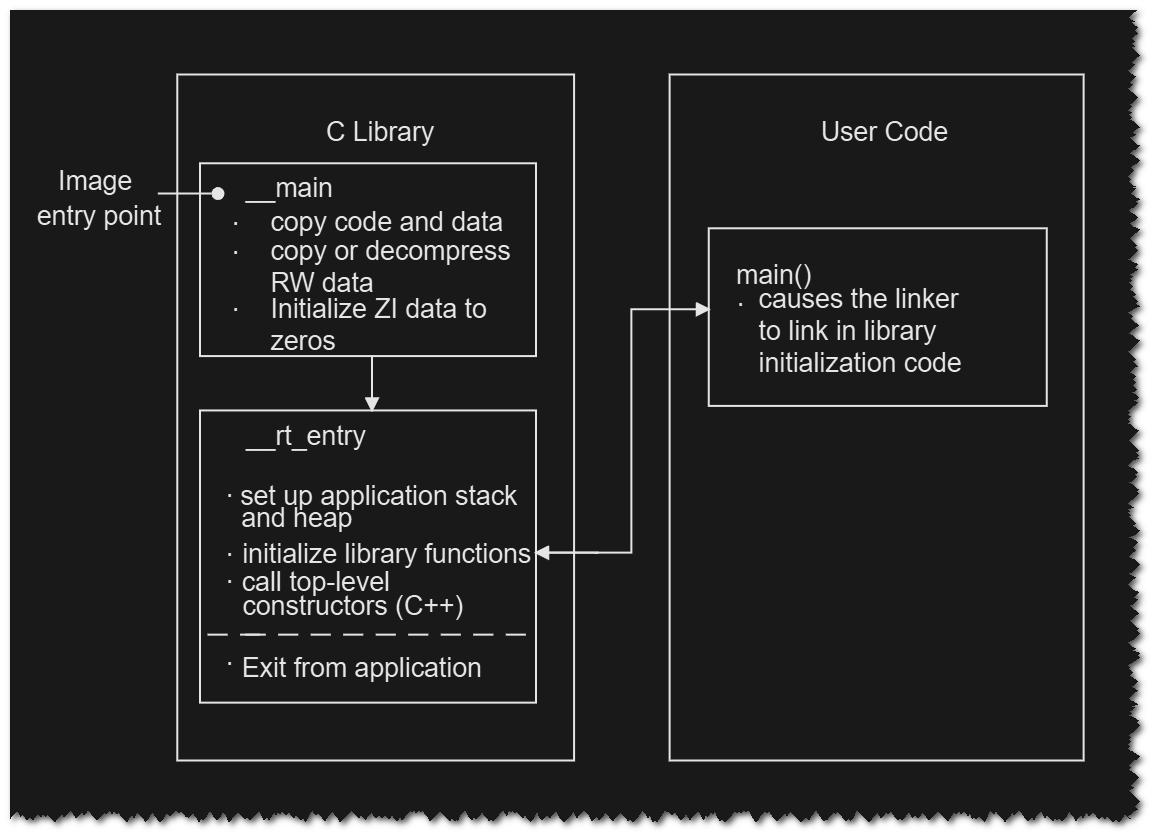
__main is responsible for setting up the memory and __rt_entry is responsible for setting up the run-time environment.
__main performs code and data copying, decompression, and zero initialization of the ZI data. It then branches to __rt_entry to set up the stack and heap, initialize the library functions and static data, and call any top level C++ constructors. __rt_entry then branches to main(), the entry to your application. When the main application has finished executing, __rt_entry shuts down the library, then hands control back to the debugger.
The function label main() has a special significance. The presence of a main() function forces the linker to link in the initialization code in __main and __rt_entry. Without a function labeled main(), the initialization sequence is not linked in, and as a result, some standard C library functionality is not supported.
__main 负责设置好存储资源;__rt_entry 负责设置好运行时环境。这俩属于c library。
__main 首先复制代码和数据、复制或解压RW数据、初始化ZI数据为零。执行完毕后,流转到 __rt_entry ,它会设置应用程序的堆和栈、初始化库函数和静态数据,之后调用顶层 C++ 构造,进入到 main() 这里就是我们的应用程序。当 main() 应用程序执行完毕后,__rt_entry 将关闭库并将控制权交给调试器。
main() 函数这个函数标签具有特定的意义。main()函数标签的存在才会驱使连接器将 __main 和 __rt_entry 链接进来,否则在没有 main() 函数这个标签的情况下,这个初始化序列( __main 和 __rt_entry )将不会被链接进来,最终会导致一些标准 c 库的功能将不会被支持!
参考:Documentation -- Arm Developer
STM32 _main 里做了什么
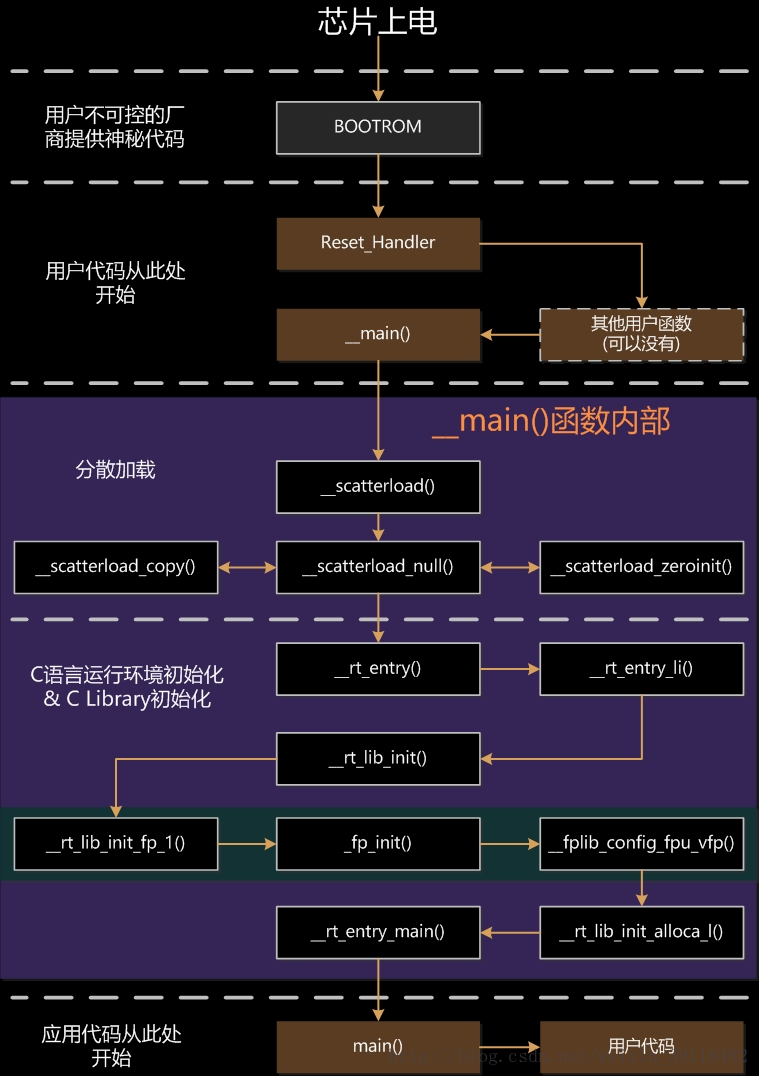
这里是对STM32f767的分析
编译之后的各种大小:
Program Size: Code=5190 RO-data=562 RW-data=16 ZI-data=1944转换成hex也就是
Code=0x1446 RO-data=0x232 RW-data=0x10 ZI-data=0x798下面的分析中,有可能遇到的各种赋值都与他们相关。
Simulator
要分析_main中做了什么需要,先使用调试模式进行调试。
这里直接使用keil的Simulator软模拟模式
- 勾选LoadApplication at Starup
- 不勾选 Run to main()
这样就可以直接运行到Reset Handle的地方,然后进入_main
开启调试就能看到下面的地方了,首先要进行SystemInit的初始化动作
216: LDR R0, =SystemInit
>0x08000298 4809 LDR r0,[pc,#36] ; @0x080002C0
217: BLX R0
0x0800029A 4780 BLX r0
218: LDR R0, =__main
0x0800029C 4809 LDR r0,[pc,#36] ; @0x080002C4
219: BX R0
220: ENDP__scatterload
__scatterload(),负责把RW/RO输出段从装载域地址复制到运行域地址,并完成了ZI运行域的初始化工作。
0x080001F8 F000F802 BL.W __scatterload (0x08000200)
0x080001FC F000F83C BL.W __rt_entry (0x08000278)
0x08000200 A00A ADR r0,{pc}+0x2C ; @0x0800022C
0x08000202 E8900C00 LDM r0,{r10-r11}
0x08000206 4482 ADD r10,r10,r0
0x08000208 4483 ADD r11,r11,r0
0x0800020A F1AA0701 SUB r7,r10,#0x01
0x0800020E 45DA CMP r10,r11
0x08000210 D101 BNE 0x08000216跳转到__scatterload (0x08000200)
ADR,adr是小范围的地址读取伪指令,实际上adr是将基于PC相对偏移的地址值或基于寄存器相对地址值读取的为指令
LDM,Load from memory into register,批量加载内存到寄存器,指令运行的方向和LDR是不一样的,是从左到右运行的。该指令是将内存中堆栈内的数据,批量的赋值给寄存器,即是出栈操作;其中堆栈指针一般对应于SP。
在这里则是把r0的内容内容给了r10和r11
r10+=r0
r11+=r0
r7=r10-1
r10-r11
BNE 是不相等跳转
所以如果r10和r11不相等就跳转到0x08000216
这里是不相等的,所以跳到了0x08000216
0x08000212 F000F831 BL.W __rt_entry (0x08000278)
0x08000216 F2AF0E09 ADR.W lr,{pc}-0x07 ; @0x0800020F
0x0800021A E8BA000F LDM r10!,{r0-r3}
0x0800021E F0130F01 TST r3,#0x01
0x08000222 BF18 IT NE
0x08000224 1AFB SUBNE r3,r7,r3
0x08000226 F0430301 ORR r3,r3,#0x01
0x0800022A 4718 BX r3首先是把0x0800020F存到了lr中,后面需要回到上面的cmp时候进行跳转。
r10! 这个!表示写回到r10中
TST,测试某一个位是否为0
这里是测试r3的第一位是否为0
IT,用于根据特定条件来执行紧随其后的1~4条指令,NE表示不等于
TST与IT连用也就是检测r3第一位是否为0 为0则执行接下来的1条指令
SUBNE,条件执行减法运算(NE),就是不等于0的情况下执行
ORR,或指令
|----|-----------------|
| r3 | =0x01,然后跳转到r3地址 |
__scatterload_copy
0x08000234 3A10 SUBS r2,r2,#0x10
0x08000236 BF24 ITT CS
0x08000238 C878 LDMCS r0!,{r3-r6}
0x0800023A C178 STMCS r1!,{r3-r6}
0x0800023C D8FA BHI __scatterload_copy (0x08000234)
0x0800023E 0752 LSLS r2,r2,#29
0x08000240 BF24 ITT CS
0x08000242 C830 LDMCS r0!,{r4-r5}
0x08000244 C130 STMCS r1!,{r4-r5}
0x08000246 BF44 ITT MI
0x08000248 6804 LDRMI r4,[r0,#0x00]
0x0800024A 600C STRMI r4,[r1,#0x00]
0x0800024C 4770 BX lr可以分析一下里面的内容,R0就是程序加载视图的RW区的起始地址(0x08002de0),R1就是要输出的执行视图的RW区的地址(0x20000000),R2就是要复制的RW数据的个数,R3是复制函数(__scatterload_copy)的地址。
r2-=0x10
ITT则是根据C位的情况来执行下面的两条指令
其实就开始了循环
BHI,是无符号数大于跳转到后面的地址
这里不大于所以没有跳转
一直执行就会跳回到前面的lr,然后继续走到下面这个位置
0x08000250 2300 MOVS r3,#0x00
0x08000252 2400 MOVS r4,#0x00
0x08000254 2500 MOVS r5,#0x00
0x08000256 2600 MOVS r6,#0x00
0x08000258 3A10 SUBS r2,r2,#0x10
0x0800025A BF28 IT CS
0x0800025C C178 STMCS r1!,{r3-r6}
0x0800025E D8FB BHI 0x08000258
0x08000260 0752 LSLS r2,r2,#29
0x08000262 BF28 IT CS
0x08000264 C130 STMCS r1!,{r4-r5}
0x08000266 BF48 IT MI
0x08000268 600B STRMI r3,[r1,#0x00]
0x0800026A 4770 BX lr清空了r3,r4,r5,r6,然后r2此时等于0x798 r1=0x20020010,这个和我当前工程有关
r2-=16
接着就是循环递减r2,把就是每次16字节的把r1的内存地址全部置为0
这里其实是ZI段清零的操作
清零完成以后,跳回到之前保存的lr cmp的位置上
__rt_entry()
然后就进入了__rt_entry
0x0800020E 45DA CMP r10,r11
0x08000210 D101 BNE 0x08000216
0x08000212 F000F831 BL.W __rt_entry (0x08000278)__user_setup_stackheap
0x08000278 F000F833 BL.W __user_setup_stackheap (0x080002E2)
0x0800027C 4611 MOV r1,r2跳转到0x080002E2 设置用户堆栈
0x080002E2 4675 MOV r5,lr
0x080002E4 F000F82C BL.W __user_libspace (0x08000340)
0x08000340 4800 LDR r0,[pc,#0] ; @0x08000344
0x08000342 4770 BX lr继续运行,然后初始化堆栈
0x080002E8 46AE MOV lr,r5
0x080002EA 0005 MOVS r5,r0
0x080002EC 4669 MOV r1,sp
0x080002EE 4653 MOV r3,r10
0x080002F0 F0200007 BIC r0,r0,#0x07
0x080002F4 4685 MOV sp,r0
0x080002F6 B018 ADD sp,sp,#0x60
0x080002F8 B520 PUSH {r5,lr}
0x080002FA F7FFFFDB BL.W __user_initial_stackheap (0x080002B4)__user_initial_stackheap
__user_initial_stackheap:
0x080002B4 4804 LDR r0,[pc,#16] ; @0x080002C8
0x080002B6 4905 LDR r1,[pc,#20] ; @0x080002CC
0x080002B8 4A05 LDR r2,[pc,#20] ; @0x080002D0
0x080002BA 4B06 LDR r3,[pc,#24] ; @0x080002D4
0x080002BC 4770 BX lr完成以后跳回之前的位置继续执行。
0x080002FE E8BD4020 POP {r5,lr}
0x08000302 F04F0600 MOV r6,#0x00
0x08000306 F04F0700 MOV r7,#0x00
0x0800030A F04F0800 MOV r8,#0x00
0x0800030E F04F0B00 MOV r11,#0x00
0x08000312 F0210107 BIC r1,r1,#0x07
0x08000316 46AC MOV r12,r5
0x08000318 E8AC09C0 STM r12!,{r6-r8,r11}
0x0800031C E8AC09C0 STM r12!,{r6-r8,r11}
0x08000320 E8AC09C0 STM r12!,{r6-r8,r11}
0x08000324 E8AC09C0 STM r12!,{r6-r8,r11}
0x08000328 468D MOV sp,r1
0x0800032A 4770 BX lr回到入口位置
__rt_lib_init
0x0800027C 4611 MOV r1,r2
exit:
0x0800027E F7FFFFF5 BL.W __rt_lib_init (0x0800026C)__rt_lib_init 初始化
__rt_lib_init:
0x0800026C B51F PUSH {r0-r4,lr}
__rt_lib_init_fp_1:
0x0800026E F001F9E1 BL.W _fp_init (0x08001634)
...
0x08001634 F04F7040 MOV r0,#0x3000000
0x08001638 EEE10A10 VMSR FPSCR, r0
0x0800163C 4770 BX lr
...
__rt_lib_init_alloca_1:
0x08000272 BD1F POP {r0-r4,pc}进入main函数
__re_entry_main:
0x08000282 F001F98F BL.W main (0x080015A4)
...
0x080015A4 B086 SUB sp,sp,#0x18ial_stackheap
...从这里往后就全是main函数了
总结
启动文件的整个过程,分为如下:
- 系统初始化,包括对中断向量表的
- 加载 RW 段
- ZI 段清零
- 初始化用户堆
- 初始化微库
- 调用 main 函数。