光伏功率预测 | BP神经网络多变量单步光伏功率预测(Matlab完整源码和数据)
目录
效果一览
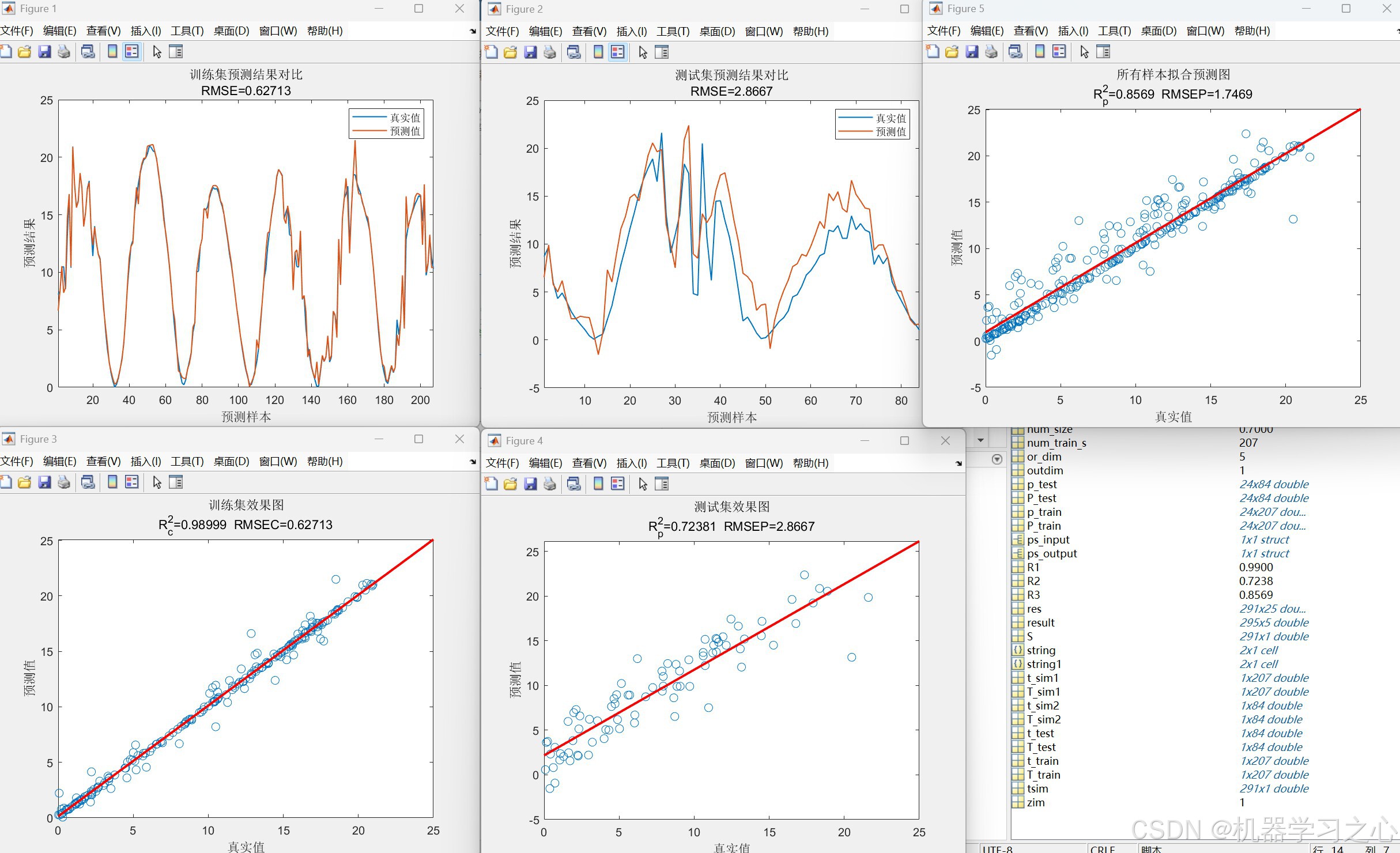
基本介绍
光伏功率预测,BP神经网络多变量单步光伏功率预测(Matlab完整源码和数据)
程序设计
完整代码获取链接:光伏功率预测,BP神经网络多变量单步光伏功率预测(Matlab完整源码和数据))
clike
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
%% 导入数据
result = xlsread('北半球光伏数据.xlsx');
%% 数据分析
num_samples = length(result); % 样本个数
or_dim = size(result, 2); % 原始特征+输出数目
kim = 4; % 延时步长(kim个历史数据作为自变量)
zim = 1; % 跨zim个时间点进行预测
%% 划分数据集
for i = 1: num_samples - kim - zim + 1
res(i, :) = [reshape(result(i: i + kim - 1, :), 1, kim * or_dim), result(i + kim + zim - 1, :)];
end
%% 数据集分析
outdim = 1; % 最后一列为输出
num_size = 0.7; % 训练集占数据集比例
num_train_s = round(num_size * num_samples); % 训练集样本个数
f_ = size(res, 2) - outdim; % 输入特征维度
%% 划分训练集和测试集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);
P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);
%% 数据归一化
[P_train, ps_input] = mapminmax(P_train, 0, 1);
P_test = mapminmax('apply', P_test, ps_input);
[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);参考资料
1 https://blog.csdn.net/kjm13182345320/article/details/129215161
2 https://blog.csdn.net/kjm13182345320/article/details/128105718