1. TF发布
- 静态变换 :优先通过Launch文件配置,确保启动时自动加载 。
- 动态变换 :需在代码中循环发布(频率通常≥10Hz),避免TF断开。
- 坐标系设计 :传感器数据绑定到自身坐标系(如base_scan)。
- 机器人本体坐标系层级:world→map→odom→base_footprint→base_link→传感器坐标系 。
1.1 终端静态发布
用于发布固定不变的坐标系变换 (如传感器与机器人本体的固定关系),常用工具为 static_transform_publisher,语法如下:
bash
#参数说明 :
#x y z:父坐标系到子坐标系的平移向量 (单位:米)。
#yaw pitch roll:绕Z-Y-X轴的欧拉角旋转 (单位:弧度)。
#frame_id:父坐标系名称(如base_link)。
#child_frame_id:子坐标系名称(如laser)。
#period_in_ms:发布周期(单位:毫秒,通常设为100ms)。
rosrun tf static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
#示例:
#发布base_link到base_scan的变换(平移0.1m向前,0.2m向上,无旋转),即将base_link主题的数据(x y z yaw pitch roll),进行变换为(x+0.1 y z+0.2 yaw pitch roll)发布到base_scan主题:
# 物理意义验证,假设机器人基座(base_link)位于 (x, y, z),激光雷达(base_scan)安装在基座前方 0.1m 和上方 0.2m 处,通过这个命令,激光雷达的坐标会正确表示为 base_link 坐标加 (0.1, 0, 0.2),符合实际安装位置。
rosrun tf static_transform_publisher 0.1 0 0.2 0 0 0 base_link base_scan 1001.2 Launch文件静态发布
xml
<!-- 语法 含义参考命令终端-->
<node pkg="tf" type="static_transform_publisher" name="transform_name"
args="x y z yaw pitch roll frame_id child_frame_id period_in_ms"/>
<!--# 示例-->
<node pkg="tf" type="static_transform_publisher" name="laser_tf"
args="0.1 0 0.2 0 0 0 base_link base_scan 100"/>1.3 动态TF发布
用于发布实时变化的坐标系变换 (如机器人本体运动),需通过代码实现,下面示例发布odom到base_footprint的动态变换(里程计坐标系到机器人2D投影坐标系)。
python
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped
rospy.init_node('dynamic_tf_publisher')
broadcaster = tf2_ros.TransformBroadcaster()
rate = rospy.Rate(10) # 10Hz
while not rospy.is_shutdown():
transform = TransformStamped()
transform.header.stamp = rospy.Time.now()
transform.header.frame_id = "odom"
transform.child_frame_id = "base_footprint"
transform.transform.translation.x = 1.0
transform.transform.rotation.w = 1.0
broadcaster.sendTransform(transform)
rate.sleep()1.4 发布规则
- 父子坐标系关系 :每个TF变换需明确父坐标系(frame_id)和子坐标系(child_frame_id),变换方向为父→子 。
- 时间戳同步 :动态TF需使用ros::Time::now()确保时间戳同步,避免TF缓存错误。
- 多机器人场景 :多机器人系统中需为每个机器人命名独立坐标系(如robot1/base_link),并通过world坐标系统一管理
2. 订阅监听
2.1 监听特定坐标系变换
使用 tf_echo 工具实时监听两个坐标系之间的变换:
bash
# 参数说明 :
#frame_id:父坐标系名称(如map)。
#child_frame_id:子坐标系名称(如base_link)。
rosrun tf tf_echo frame_id child_frame_id
# 示例:监听map到base_link的变换:
# 输出内容包含平移(translation)、旋转(rotation)和时间戳等信息
rosrun tf tf_echo map base_link2.2 查看整个TF树
bash
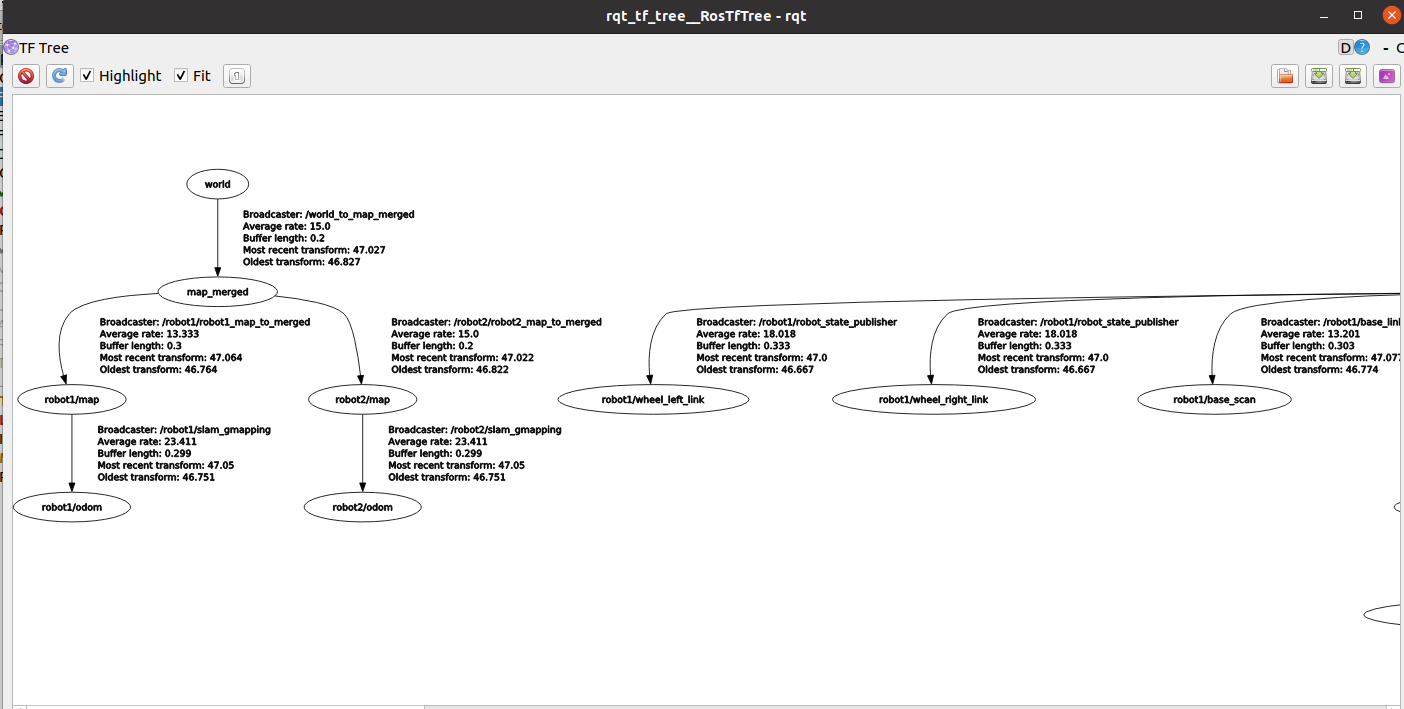
#在线查看
rosrun rqt_tf_tree rqt_tf_tree
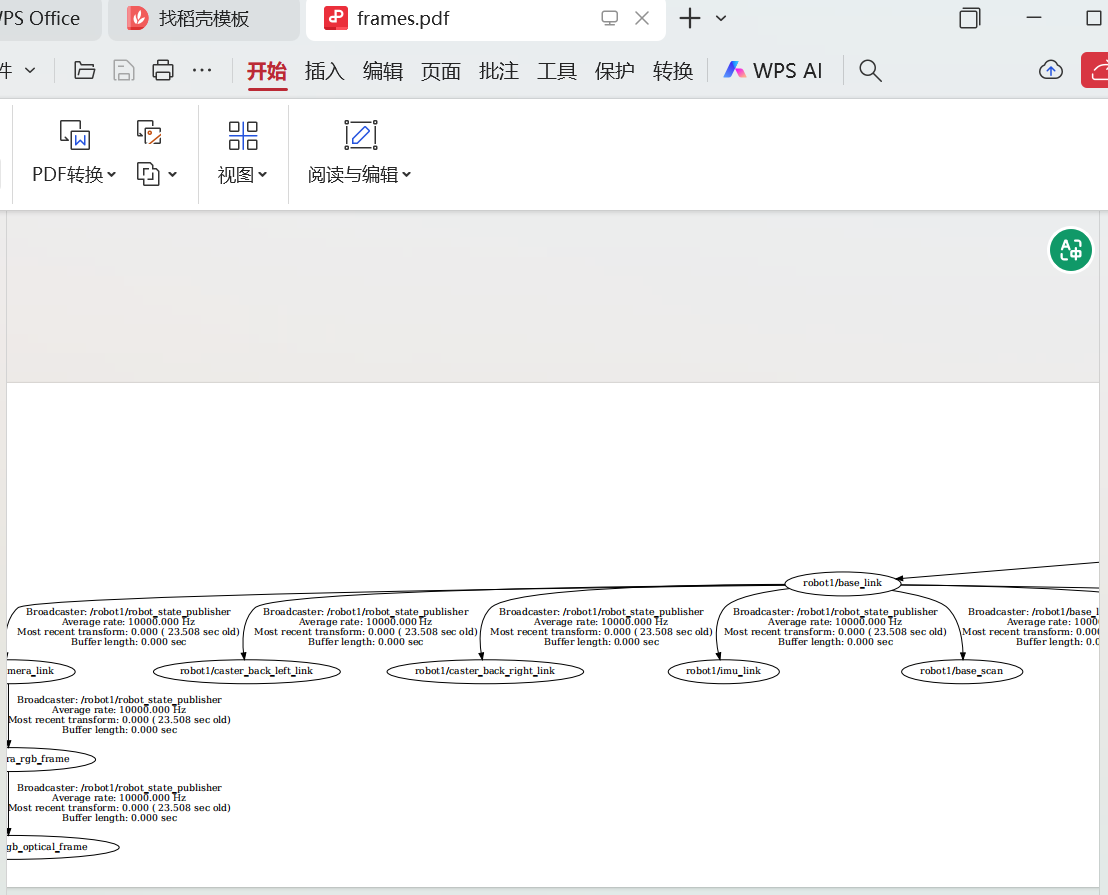
# 生成文件
rosrun tf view_frames
2.3 代码动态监听
python
import rospy
import tf2_ros
rospy.init_node('tf_subscriber')
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(10) # 10Hz
while not rospy.is_shutdown():
try:
transform = buffer.lookup_transform("odom", "base_footprint", rospy.Time(0))
print("Current transform:", transform.transform)
except tf2_ros.LookupException:
continue
rate.sleep()2.4 订阅规则
-
时间戳同步 :
使用rospy.Time(0)获取最新缓存数据,避免因时间戳不匹配导致失败。
若需精确时间点的变换(如传感器数据同步),需确保时间戳对齐 。
-
TF缓存机制 :
TransformListener默认缓存最近5秒的TF数据,可通过参数调整缓存时长:
buffer = tf2_ros.Buffer(ros::Duration(10.0))
-
多机器人场景 :在多机器人系统中,需通过命名空间区分坐标系(如robot1/base_link),并通过world坐标系统一管理