在开始安装ros环境前,需要确保已经准备好了以下操作
1.树莓派5开发板,已经烧录了 ubuntu 24.04,并做好了一些基础配置,如:远程访问配置,语言配置,网络配置等
2.新手建议在上面安装一个宝塔面板进行后续操作很方便
由于树莓派5开发板的芯片是 arm架构,我这里通过以下方式进行安装ros环境。
登录宝塔面板,在宝塔上安装docker环境:
1.ubuntu22.04 镜像拉取
宝塔上的docker安装好后,使用ssh远程树莓派或者直接在宝塔上点击终端命令行输入以下命令拉取 ubuntu22.04
docker pull ubuntu:22.04 --platform=arm64
ubuntu22.04 镜像拉取完毕后,接着在本地镜像里面就可以查看到,然后点击创建一个容器,按自己需求取一个名字。

启动容器,点击容器后面的终端按钮
2.小鱼ros2 humble
打开容器的终端后,在里面输入以下命令安装:小鱼ros2 humble,这个对新手很友好,可以根据提示一键安装
wget http://fishros.com/install -O fishros && . fishros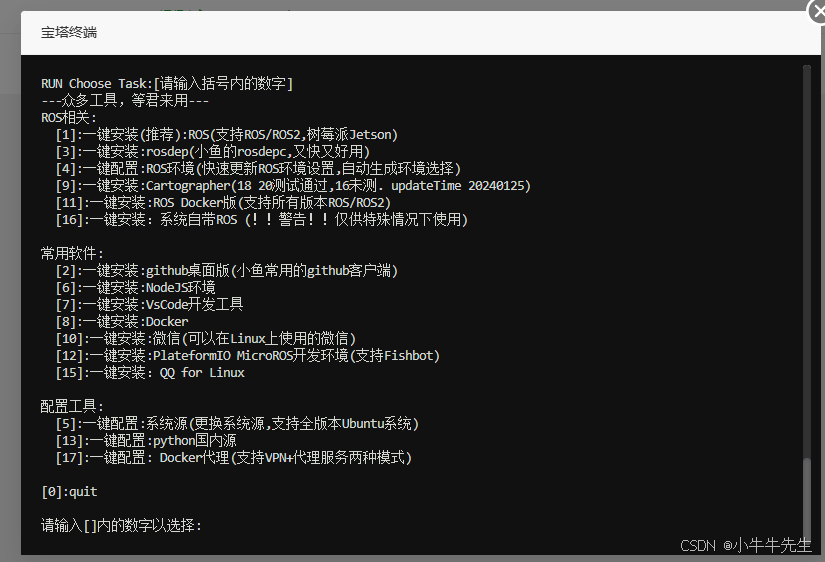
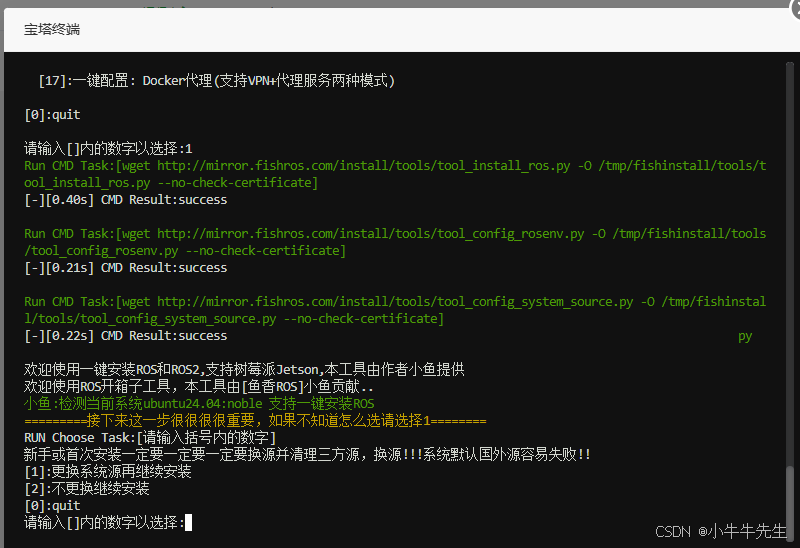
根据提示,选择对应的指令,一般按提示中的推荐跟着走就行,这一步要等很久,静待完成即可
3.安装eqmu
docker run --rm --privileged multiarch/qemu-user-static:register4.设置环境
source /opt/ros/jazzy/setup.bash
source ~/.bashrc5.测试
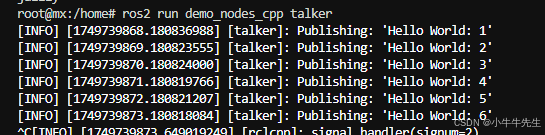
ros2 run demo_nodes_cpp talker如果出现如下图类似的内容则表示安装成功
本文参考自:https://blog.csdn.net/ashcn2001/article/details/147900993