技术背景
在智能制造高速发展的今天,工业机器人已经从单一的生产作业工具,转变为协作化、智能化的生产伙伴。无论是高精度的多关节机械臂、自主导航的移动机器人,还是与人协同工作的协作机器人,都越来越多地被应用于智能工厂、仓储物流、远程作业等关键领域。
随着机器人功能的不断增强,系统对远程视频监控与控制 的需求也在不断升级。这不仅是为了满足运维管理、生产质检、远程协作等日常需求,更关系到生产过程中的即时响应能力 与安全防护机制。
尤其是在如下典型场景中:
-
多关节机械臂在高风险环境下的远程遥控操作
-
移动机器人穿越复杂工况的路径规划与障碍检测
-
协作机器人与人工智能视觉系统的深度融合
-
工业无人车、自动巡检机器人对环境感知与反馈的实时性要求
对低延迟、高稳定性的视频传输 提出了更为严苛的要求。在这样的应用背景下,如何在不牺牲视频质量的前提下,保障远程监控画面的流畅性与实时交互性,如何在多种网络环境下(有线/无线/5G/专网)维持稳定的传输效果,以及如何方便地将视频数据集成到工业控制系统和 AI 分析系统中,成为了工业机器人系统架构必须重点解决的技术挑战。
1️⃣ 工业机器人应用中的视频传输需求

在实际部署过程中,工业机器人常见的远程视频传输需求包括:
-
✅ 远程运维监控
-
✅ AI 视觉识别与质检
-
✅ 复杂环境下的手动远程操作
-
✅ 移动平台的路径规划与避障辅助
这些应用普遍要求:
-
低延迟(通常要求 <200ms,最好能100~200ms)
-
高稳定性(弱网下仍需保持流畅)
-
高分辨率支持(1080p / 4K 乃至 8K)
-
多协议兼容(RTSP / RTMP)
-
灵活的系统集成
2️⃣ RTSP 协议在工业机器人视频传输中的优势与适配性
在工业机器人系统中,视频传输通常需要具备 标准化、低延迟、易集成 的特性,RTSP(Real-Time Streaming Protocol,实时流传输协议)正是这样一种天然契合的协议方案。
RTSP 协议自诞生以来,广泛应用于音视频传输领域,具备以下关键优势:
-
📡 标准化协议,兼容性强
作为国际标准协议,RTSP 能够兼容市面上绝大多数摄像头、编码设备与媒体服务器,便于不同厂家、不同型号设备的互联互通。
-
💡 支持多种传输模式
可根据网络环境,灵活选择 TCP(可靠传输) 或 UDP(低延迟传输) ,也可与 RTP 协议结合实现媒体数据的高效封装,满足对稳定性或时效性的不同需求。
-
🛡 内建鉴权与加密机制
支持基本认证、摘要认证,结合 SSL/TLS 可实现传输加密,为工业生产环境下的视频数据安全保驾护航。
-
🎯 适合局域网、专网及工业物联网场景
无论是本地局域网环境下的高速视频回传,还是通过专网、5G 工业专线的远程控制,RTSP 都能灵活适配,支持稳定的跨网络视频传输。
在工业机器人典型应用中,无论是机械臂抓取、移动机器人导航,还是远程智能巡检,设备本体通常配备有内置或外挂摄像头,负责实时采集视频流。
这些视频流大多通过 RTSP 协议 向控制中心或操作终端推送,系统播放端因此需要具备以下能力:
-
🚀 快速拉流与自动重连
在设备启动或网络波动时,能够迅速建立连接、异常后自动恢复,保证监控画面的连续性。
-
🔄 TCP/UDP 自动切换
针对网络状况变化,具备智能切换传输模式的能力,确保在可靠性与延迟之间达到最佳平衡。
-
🎥 低延迟解码与实时渲染
播放器端必须支持硬解码、快启动、低缓冲技术,最大限度降低解码与显示的系统延迟,满足远程控制与实时反馈的严苛需求。
RTSP 协议的这些特性,使其在工业机器人应用中,成为远程视频传输的首选方案。
配合高性能播放器 SDK,可以帮助开发者快速构建起一套稳定、可靠的低延迟视频监控链路,为智能制造与工业自动化赋能。
3️⃣ 高性能 RTSP 播放器 SDK 在工业应用中的核心价值
在工业机器人系统的远程控制与监控场景中,视频播放端不仅承担着"观看"的功能,更是系统响应、智能决策与安全保障的重要一环。
使用具备工业级特性的 专业 RTSP 播放器 SDK,能够有效提升系统的开发效率与运行稳定性,为工业场景带来以下关键价值,通过集成大牛直播RTSP播放器 SDK,系统开发者可以获得:
-
稳定可靠的低延迟视频传输能力
-
弹性可控的播放参数配置
-
灵活高效的渲染与数据处理能力
-
适配多种工业应用场景的高可扩展性
这不仅能够显著缩短项目开发周期,还能帮助工业机器人系统在各种复杂工况下,始终保持高性能的视频传输与交互体验。
🎥 软解码/硬解码自由切换
支持 纯软件解码 与 硬件加速解码 ,可根据终端设备性能、解码需求灵活切换。
在高性能终端或移动设备上,利用硬件加速能显著降低 CPU 占用,提升续航与响应速度。
⚡ 超低延迟模式与快速启动机制
内置 低延迟播放模式 与 快启动优化算法 ,通过智能缓冲管理和流控策略,能够有效降低播放延时。
适用于工业机器人远程控制、AI 视觉联动等需要实时反馈的关键场景。
🖥 自定义渲染与共享纹理支持
支持 OpenGL、Unity3D 等图形框架的 自定义渲染 ,通过共享纹理可实现 GPU 级别的视频数据交互。
这对于工业机器人与 AR 视觉、Unity 控制界面的集成,提供了极高的灵活性和扩展性。
🔧 灵活全面的播放控制接口
支持丰富的播放参数配置,包括:
-
缓冲控制(动态调节播放缓冲)
-
画面旋转、镜像反转
-
分辨率、下载速度、缓冲进度的实时回调
-
视频 SEI 数据、YUV 数据、音视频数据回调(方便与 AI 视觉分析系统对接)
这些功能,助力开发者根据工业现场实际需求,灵活调整播放策略,提升系统响应性。
📡 弱网环境下的传输优化
播放器内置 TCP/UDP 自动切换 与 异常重连机制 ,即使在弱网、复杂工业专网环境下,也能保证视频拉流的稳定性与流畅性。
智能检测机制可在网络环境变化时自动调整传输策略,极大降低了断流和重连带来的业务中断风险。
📸 实时截图与录像功能
支持一键截图、自动录像与录制文件分段管理,方便在远程监控、质检留存、异常取证等场景下,进行视频数据的留存与后续分析。
4️⃣ 工业机器人场景下的 RTSP 播放器集成实战
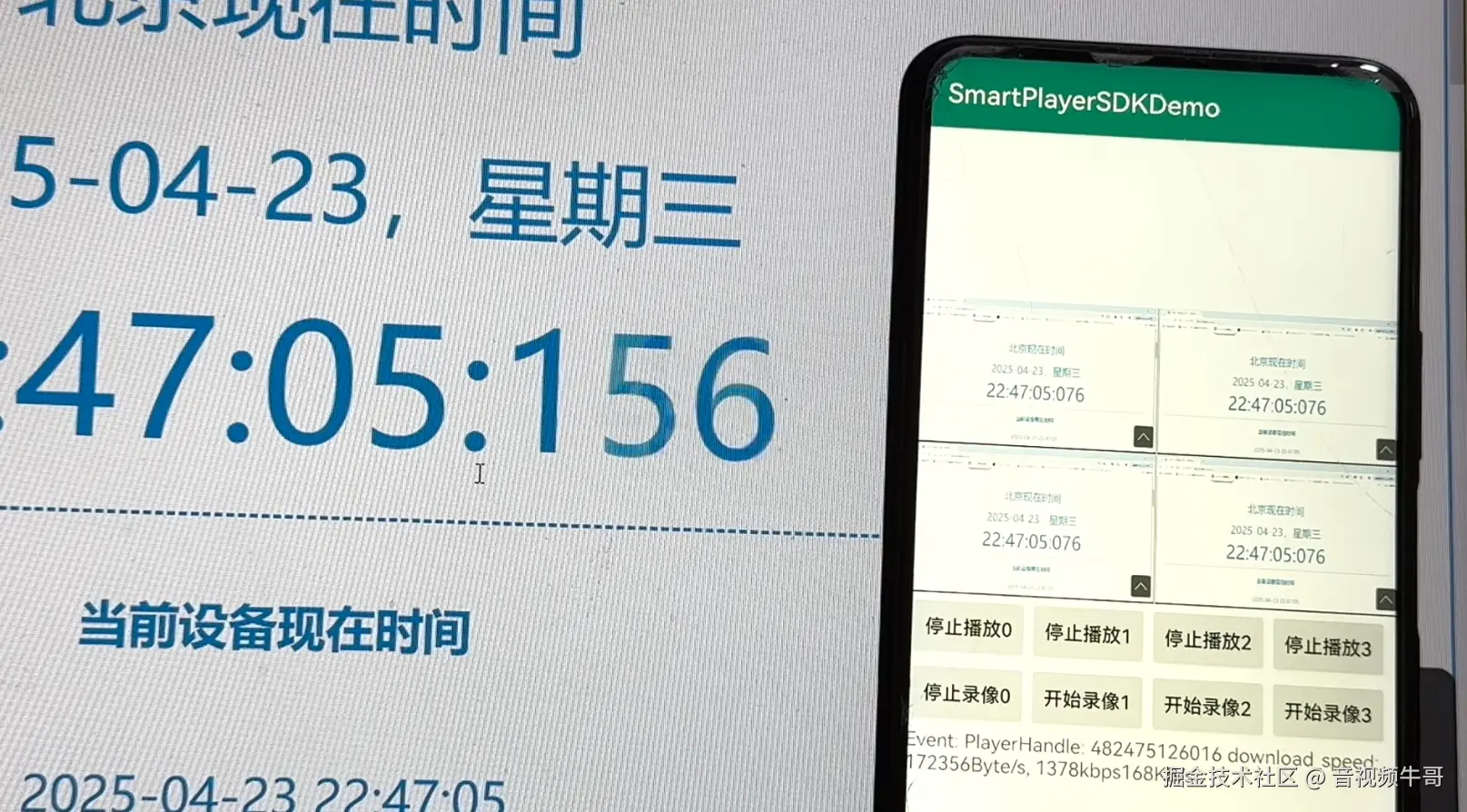
在机器人系统中实现 稳定、低延迟的视频回传链路,不仅仅是"能播放"那么简单,更要求在软硬件层面协同优化。以下是大牛直播SDK的SmartPlayer基于高性能 RTSP 播放器 SDK 的核心集成思路,已在多种工业机器人场景中得到应用验证:
🛠 核心功能设计
✅ 1. 机器人端启动 RTSP 视频服务
-
机器人侧嵌入式计算单元,部署视频编码模块
-
通过 RTSP Server(可内嵌或外挂)将实时画面推流
-
支持 TCP/UDP 兼容传输,必要时启用鉴权保护
✅ 2. 控制端(如移动设备/工业平板)集成 RTSP 播放器 SDK
-
引入 SDK,快速集成播放器模块
-
支持 Android / iOS / Unity3D 等多平台应用
-
无需自行处理解码、渲染、网络协议,SDK 一站式封装
✅ 3. 播放器性能调优(低延迟配置示例)
-
⚡ 实际场景中,经测试该配置下,可实现100-200ms低延迟播放
-
⚡ 适用于远程控制、路径规划辅助、视频监控场景
✅ 4. 播放过程中的事件监测与异常处理
播放器 SDK 内建全链路事件上报机制,可通过代理回调实时获取状态:
-
✅ 可在事件回调中处理网络异常、自动重连、状态提示
-
✅ 有效保障监控链路的稳定性与业务连续性
✅ 5. 视频数据回调接入 AI 模型或控制逻辑
播放器 SDK 支持 YUV 数据回调,开发者可在业务层进行:
-
目标检测、缺陷识别、轨迹追踪
-
视频智能分析、异常检测
-
结合 OpenCV / AI 模型的实时处理
✅ 技术集成总结
功能模块
应用价值
播放器低延迟调优
确保实时监控与远程控制的交互性
异常事件监测与重连
提高系统稳定性,降低断流风险
视频数据回调与 AI 集成
实现智能分析与自主决策
接口设计
Android RTSP|RTMP播放端SDK接口详解
调用描述
接口
接口描述
最先调用,如成功返回播放********实例
SmartPlayerOpen
player初始化,设置上下文信息,返回player句柄
Event回调
SetSmartPlayerEventCallbackV2
设置event callback
硬解码设置 ****(H.264********)****
SetSmartPlayerVideoHWDecoder
设置是否用H.264硬解码播放,如硬解码不支持,自动适配到软解码
硬解码设置 ****(H.265********)****
SetSmartPlayerVideoHevcHWDecoder
设置是否用H.265硬解码播放,如硬解码不支持,自动适配到软解码
视频画面
填充模式
SmartPlayerSetRenderScaleMode
设置视频画面的填充模式,如填充整个view、等比例填充view,如不设置,默认填充整个view
设置SurfaceView模式下render类型
SmartPlayerSetSurfaceRenderFormat
设置SurfaceView模式下(NTRenderer.CreateRenderer第二个参数传false的情况),render类型
0: RGB565格式,如不设置,默认此模式; 1: ARGB8888格式
设置SurfaceView模式下抗锯齿效果
SmartPlayerSetSurfaceAntiAlias
设置SurfaceView模式下(NTRenderer.CreateRenderer第二个参数传false的情况),抗锯齿效果,注意:抗锯齿模式开启后,可能会影像性能,请慎用
设置播放的surface
SmartPlayerSetSurface
设置播放的surface,如果为null,则播放纯音频
设置********视频硬解码下Mediacodec自行绘制模式
SmartPlayerSetHWRenderMode
此种模式下,硬解码兼容性和效率更好,回调YUV/RGB ****、快照和图像等比例缩放********功能将不可用****
更新硬解码surface
SmartPlayerUpdateHWRenderSurface
设置更新硬解码surface
音频回调
YUV/RGB
SmartPlayerSetExternalRender
提供解码后YUV/RGB数据接口,供用户自己render或进一步处理(如视频分析)
Audio
SmartPlayerSetExternalAudioOutput
回调audio数据到上层(供二次处理之用)
audio输出类型
SmartPlayerSetAudioOutputType
如果use_audiotrack设置为0,将会自动选择输出设备,如果设置为1,使用audiotrack模式,一对一回音消除模式下,请选用audiotrack模式
Video输出类型
NTRenderer.CreateRenderer(上层demo内)
第二个参数,如果是true,用openGLES绘制,false则用默认surfaceView
播放模式
缓冲时间设置
SmartPlayerSetBuffer
设置播放端缓存数据buffer,单位:毫秒,如不需buffer,设置为0
首屏秒开
SmartPlayerSetFastStartup
设置快速启动后,如果CDN缓存GOP,实现首屏秒开
低延迟模式
SmartPlayerSetLowLatencyMode
针对类似于直播娃娃机等期待超低延迟的使用场景,超低延迟播放模式下,延迟可达到200~400ms
快速切换URL
SmartPlayerSwitchPlaybackUrl
快速切换播放url,快速切换时,只换播放source部分,适用于不同数据流之间,快速切换(如娃娃机双摄像头切换或高低分辨率流切换)
RTSP TCP/UDP模式设置
SmartPlayerSetRTSPTcpMode
设置RTSP TCP/UDP模式,如不设置,默认UDP模式
RTSP超时时间设置
SmartPlayerSetRTSPTimeout
设置RTSP超时时间,timeout单位为秒,必须大于0
设置RTSP TCP/UDP自动切换
SmartPlayerSetRTSPAutoSwitchTcpUdp
对于RTSP来说,有些可能支持rtp over udp方式,有些可能支持使用rtp over tcp方式
为了方便使用,有些场景下可以开启自动尝试切换开关, 打开后如果udp无法播放,sdk会自动尝试tcp, 如果tcp方式播放不了,sdk会自动尝试udp.
设置RTSP用户名和密码
SetRTSPAuthenticationInfo
如果RTSP URL已包含用户名和密码, 此接口设置的用户名和密码将无效. 就是说要用这个接口设置的用户名和密码去做认证, RTSP URL不能包含用户名和密码.
实时静音
SmartPlayerSetMute
实时静音
设置播放音量
SmartPlayerSetAudioVolume
播放端音量实时调节,范围0,100,0时为静音,100为原始流数据最大音量
设置是否禁用 Enhanced
RTMP
DisableEnhancedRTMP
disable enhanced RTMP, SDK默认是开启enhanced RTMP的
实时截图
CaptureImage
支持JPEG和PNG两种格式
视频镜像旋转
旋转
SmartPlayerSetRotation
设置顺时针旋转, 注意除了0度之外, 其他角度都会额外消耗性能,当前支持 0度,90度, 180度, 270度 旋转
水平反转
SmartPlayerSetFlipHorizontal
设置视频水平反转
垂直反转
SmartPlayerSetFlipVertical
设置视频垂直反转
设置URL
SmartPlayerSetUrl
设置需要播放或录像的RTMP/RTSP url
开始播放
SmartPlayerStartPlay
开始播放RTSP/RTMP流
停止播放
SmartPlayerStopPlay
停止播放RTSP/RTMP流
关闭播放实例
SmartPlayerClose
结束时必须调用close接口释放资源
功能支持
- 音频:AAC/Speex(RTMP)/PCMA/PCMU;
- 视频:H.264、H.265;
- 播放协议:RTSP|RTMP;
- 支持纯音频、纯视频、音视频播放;
- 支持多实例播放;
- 支持软解码,特定机型硬解码;
- 支持RTSP TCP、UDP模式设置;
- 支持RTSP TCP、UDP模式自动切换;
- 支持RTSP超时时间设置,单位:秒;
- 支持buffer时间设置,单位:毫秒;
- 支持超低延迟模式;
- 支持断网自动重连、视频追赶,支持buffer状态等回调;
- 支持视频view实时旋转(0° 90° 180° 270°);
- 支持视频view水平反转、垂直反转;
- 支持Surfaceview/OpenGL ES/TextureView绘制;
- 支持视频画面填充模式设置;
- 音频支持AudioTrack、OpenSL ES模式;
- 支持jpeg、png实时截图;
- 支持实时音量调节;
- 支持解码前音视频数据回调;
- 支持解码后YUV/RGB数据回调;
- 支持Enhanced RTMP;
- 支持扩展录像功能;
- 支持Android 5.1及以上版本。
通过 SDK 的完整功能与灵活的接口,开发者能够高效构建面向工业场景的远程监控与智能控制系统,大大缩短开发周期,提升产品竞争力。
5️⃣ 工业机器人典型应用场景与技术价值
无论是工业生产线、智慧物流,还是高危环境下的远程操控,稳定、低延迟的视频回传与智能播放能力,都是工业机器人系统安全高效运行的重要基础。结合大牛直播SDK的高性能 RTSP 播放器 SDK,可以为各类工业机器人应用场景提供专业级的远程视频解决方案,助力工业智能化与远程协作的全面升级。
🔧 工业机械臂远程调试
需求:高精度动作控制、远程参数调优、异常工况实时监控
优势:超低延迟视频回传(100-200ms),保障调试过程的精准响应;稳定的 RTSP 拉流能力,支持自动重连;结合事件回调机制,可实现远程故障监测与报警联动
🚗 移动机器人视频巡检
需求:复杂路径导航、环境感知与避障、无人值守远程监控
优势:RTSP 实时流在弱网环境下依旧保持高稳定性;具备 TCP/UDP 自动切换与异常重连能力,保证巡检过程不中断;可支持多终端同步监控,满足指挥中心与前端协作需求
🤖 协作机器人安全监控
需求:人机协作环境中的风险监测、异常作业预警、远程协同操作
优势:支持多终端接入与多路 RTSP 流同步播放,便于多角色协同;通过共享纹理与 AR 系统集成,增强操作反馈体验;可与控制系统对接,实现作业过程全程可视
🏭 智能产线 AI 质检
需求:生产过程中的缺陷检测、产品质量追溯、生产数据留存与分析
优势:提供 YUV 数据回调接口,方便接入 AI 分析模块;支持实时截图与录像,助力质检与生产档案管理;兼容工业视觉系统,支持高分辨率与高速处理
🛡 高风险作业环境下的远程操作
需求:高温、有毒、辐射等危险环境的远程监控与机器人操作
优势:低延迟视频回传为操控人员提供实时视觉反馈,保障作业安全;具备自动重连与异常状态上报,降低突发风险,提高作业可靠性
6️⃣ 技术总结
在工业机器人领域,稳定、低延迟的视频传输不仅是远程监控的基本需求,更是保障生产安全、实现智能控制与提升作业效率的重要基础。借助大牛直播SDK的专业级 RTSP 播放器 SDK,开发者可以高效构建出满足工业级应用要求的视频回传链路,具备以下核心价值:
-
实现毫秒级的低延迟视频传输,满足远程操控与实时监控的严苛要求
-
在多种网络环境下保持高稳定性,支持弱网自适应与异常自动重连
-
提供丰富的接口与数据回调,方便与 AI 视觉分析、智能决策系统深度融合
-
支持跨平台集成,便于快速部署在多终端、多系统的工业控制架构中
高性能播放器 SDK,不只是视频播放的工具,更是工业机器人系统中数据感知、智能交互与远程控制的重要支撑模块。
✅ 未来技术探索方向
🎯 Unity3D引擎下的低延迟播放器集成
结合三维仿真引擎,构建沉浸式的工业监控与远程操作界面,增强操作可视化体验
🎯 与 AI 边缘计算框架的协同应用
在终端侧接入实时视频分析与智能预警,提升工业机器人对复杂环境的自适应能力
🎯 跨网络环境下的远程控制与视频同步
结合穿透技术与视频同步机制,支持全球化运维与异地远程协作,打破物理空间的限制
视频技术与工业机器人深度融合,正在推动智能制造、智慧运维与工业自动化的变革。持续关注底层集成技术与视频传输优化策略,将是开发者与系统集成商在工业智能时代中脱颖而出的关键。