目录
[images 全局变量](#images 全局变量)
[do_bootz 函数](#do_bootz 函数)
[bootz_start 函数](#bootz_start 函数)
[bootz_srart 源码](#bootz_srart 源码)
[bootz_setup 函数](#bootz_setup 函数)
[do_bootm_states 函数](#do_bootm_states 函数)
[函数 bootm_start](#函数 bootm_start)
[函数 bootm_os_get_boot_func](#函数 bootm_os_get_boot_func)
[BOOTM_STATE_OS_PREP 状态](#BOOTM_STATE_OS_PREP 状态)
[函数 boot_selected_os](#函数 boot_selected_os)
前言
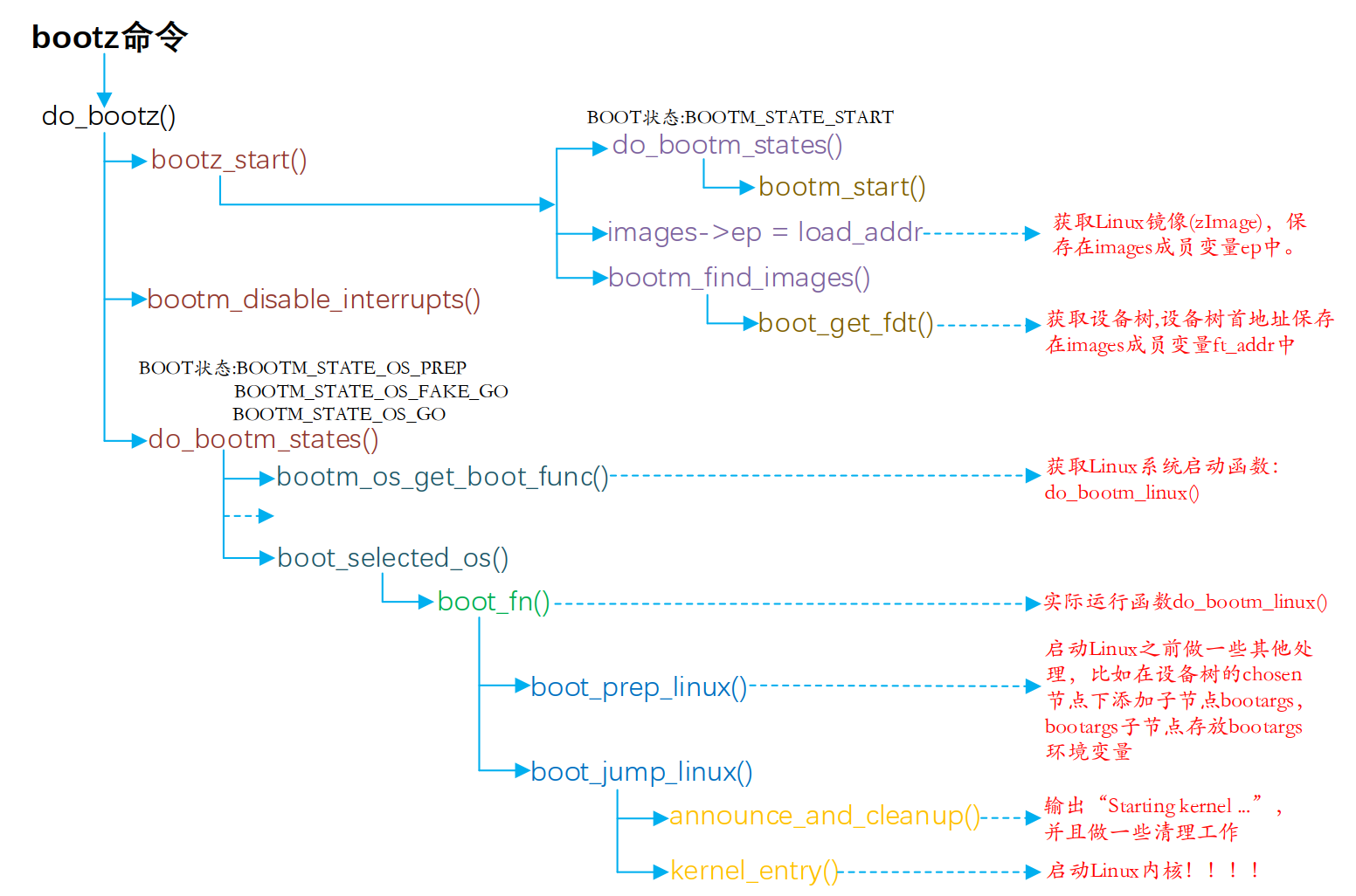
本讲内容是:**bootz 启动 Linux 内核过程,**而bootz命令写起来虽然短小,里面干的事还真不少,先来一张 bootz 命令的执行过程,如图:
话不多说,我们开始吧~
当晕头转向的时候,记得回来再看看这张图~
images 全局变量
images定义
不管是 bootz 还是 bootm 命令,在启动 Linux 内核的时候都会用到一个重要的全局变量: images.
images是 bootm_headers_t类型的全局变量,作为 U-Boot 启动 Linux 内核过程中的中央数据枢纽,其核心作用是:
- 统一管理所有启动组件(内核、ramdisk、设备树等)的元数据和状态
- 控制启动流程的阶段性推进(通过状态机机制)
- 确保各组件间的内存隔离与安全校验
| 职责维度 | 具体表现 |
|---|---|
| 数据整合 | 集中存储内核镜像、ramdisk、设备树的加载地址、大小、校验信息等 |
| 流程控制 | 通过 state位掩码(如 BOOTM_STATE_LOADOS)标记当前启动阶段 |
| 内存安全 | 记录各组件物理地址范围(如 rd_start/end),防止内存重叠 |
| 兼容性处理 | 同时支持 Legacy uImage 和 FIT 格式(通过 legacy_hdr_*和 os字段) |
| 调试支持 | 提供 verify标志控制校验强度,便于问题排查 |
images 在文件 cmd/bootm.c 中有如下定义:
cpp
bootm_headers_t images; /* pointers to os/initrd/fdt images */images 是 bootm_headers_t 类型的全局变量, 而bootm_headers_t 是个 boot 头结构体。
bootm_headers_t定义
bootm_headers_t是 U-Boot 启动流程的 中央控制枢纽,负责:
- 多镜像管理:协调内核/ramdisk/设备树的加载与验证
- 状态机控制:通过 state位域跟踪启动进度
- 内存布局记录:保存各组件物理地址范围
- 兼容性处理:支持新旧镜像格式(Legacy/uImage/FIT)
bootm_headers_t 在文件include/image.h 中的定义如下:
cpp
/**
* bootm_headers_t - U-Boot 多阶段启动控制核心数据结构
* 管理内核/ramdisk/设备树的加载、验证与状态跟踪
*/
typedef struct bootm_headers {
/*-------------------------------------------
* Legacy镜像支持(旧版uImage格式)
*-----------------------------------------*/
image_header_t *legacy_hdr_os; /* 原始Legacy镜像头指针(需在重定位前访问) */
image_header_t legacy_hdr_os_copy;/* 镜像头安全拷贝(防止运行时被覆盖) */
ulong legacy_hdr_valid; /* 头校验标记:1=有效,0=无效 */
/*-------------------------------------------
* 操作系统镜像信息(非主机工具编译时生效)
*-----------------------------------------*/
#ifndef USE_HOSTCC
image_info_t os; /* OS镜像元数据:
* - type: 镜像类型(IH_TYPE_KERNEL等)
* - comp: 压缩格式(IH_COMP_GZIP等)
* - os: 操作系统类型(IH_OS_LINUX等)
*/
ulong ep; /* 内核入口地址(最终跳转执行的PC值) */
/*-------------------------------------------
* 内存组件物理地址范围
*-----------------------------------------*/
ulong rd_start, rd_end; /* Ramdisk内存范围[start,end) */
char *ft_addr; /* 扁平设备树(FDT)内存指针 */
ulong ft_len; /* 设备树长度(字节) */
ulong initrd_start, initrd_end; /* Initrd范围(通常等同ramdisk) */
ulong cmdline_start, cmdline_end; /* 内核命令行参数存储区域 */
bd_t *kbd; /* 板级信息指针(传递内存布局等) */
#endif
/*-------------------------------------------
* 安全验证控制
*-----------------------------------------*/
int verify; /* 镜像校验开关:
* 0=关闭校验(环境变量verify=n)
* 1=启用校验(默认)
*/
/*-------------------------------------------
* 多阶段启动状态机(位掩码组合)
*-----------------------------------------*/
#define BOOTM_STATE_START (0x00000001) /* 启动流程开始 */
#define BOOTM_STATE_FINDOS (0x00000002) /* 定位OS镜像阶段 */
#define BOOTM_STATE_FINDOTHER (0x00000004) /* 查找ramdisk/设备树 */
#define BOOTM_STATE_LOADOS (0x00000008) /* 加载OS到内存 */
#define BOOTM_STATE_RAMDISK (0x00000010) /* Ramdisk处理中 */
#define BOOTM_STATE_FDT (0x00000020) /* 设备树处理中 */
#define BOOTM_STATE_OS_CMDLINE (0x00000040) /* 内核命令行设置 */
#define BOOTM_STATE_OS_BD_T (0x00000080) /* 板级信息传递 */
#define BOOTM_STATE_OS_PREP (0x00000100) /* OS启动前准备 */
#define BOOTM_STATE_OS_FAKE_GO (0x00000200) /* 模拟执行(测试用) */
#define BOOTM_STATE_OS_GO (0x00000400) /* 准备跳转到OS */
int state; /* 当前状态(多个状态可叠加) */
/*-------------------------------------------
* 内存管理扩展(LMB逻辑内存块)
*-----------------------------------------*/
#ifdef CONFIG_LMB
struct lmb lmb; /* 逻辑内存块管理器:
* - 记录保留内存区域
* - 防止OS覆盖U-Boot关键数据
*/
#endif
} bootm_headers_t;在结构体里,定义了:
cpp
image_info_t os;结构体 image_info_t,系统镜像信息结构体。
image_info_t定义
image_info_t是 U-Boot 中用于描述 可执行镜像(如内核、ramdisk、设备树等)的核心数据结构,其主要作用包括:
- 记录镜像的物理内存布局
- 标识镜像类型和属性
- 控制镜像加载和校验行为
结构体 image_info_t 在文件include/image.h 中的定义如下:
cpp
typedef struct image_info {
/*-------------------------------------------
* 内存范围描述
*-----------------------------------------*/
ulong start, end; /* Blob的物理内存范围[start, end)
* - 包含头部信息(如uImage头)
* - 单位:字节
* 示例:0x82000000-0x82012345
*/
ulong image_start, image_len; /* 纯镜像数据的起始地址和长度
* - 不含头部(如跳过uImage头)
* - 用于实际执行/解压
* 示例:0x82000040, 0x120000
*/
ulong load; /* 系统建议的加载地址
* - 可能≠start(如重定位场景)
* - 架构相关(ARM通常为0x8000)
*/
/*-------------------------------------------
* 镜像属性标识
*-----------------------------------------*/
uint8_t comp; /* 压缩算法类型:
* 0=未压缩, 1=gzip, 2=bzip2...
* 详见 include/image.h
*/
uint8_t type; /* 镜像类型:
* IH_TYPE_KERNEL=内核
* IH_TYPE_RAMDISK=ramdisk
* IH_TYPE_FIRMWARE=固件
*/
uint8_t os; /* 目标操作系统:
* IH_OS_LINUX=Linux
* IH_OS_U_BOOT=U-Boot本身
*/
int8_t arch; /* CPU架构:
* IH_ARCH_ARM=ARMv7
* IH_ARCH_ARM64=AArch64
* IH_ARCH_PPC=PowerPC
*/
} image_info_t;全局变量 images 会在 bootz 命令的执行中频繁使用到,相当于 Linux 内核启动的"灵魂"。
do_bootz 函数
bootz 命令的执行函数为 do_bootz,do_bootz是 U-Boot 中用于 启动 zImage 格式 Linux 内核 的核心函数,主要完成以下工作:
- 参数预处理:跳过命令名 bootz
- 镜像加载:通过 bootz_start初始化 images结构
- 状态机控制:分阶段执行 OS 准备和跳转
- 中断管理:确保内核启动时中断处于关闭状态
在文件 cmd/bootm.c 中有如下定义:
cpp
int do_bootz(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
int ret;
/*-------------------------------------------
* [1] 参数预处理:跳过命令名 'bootz'
*-----------------------------------------*/
argc--; argv++; // 移除argv[0]的"bootz",保留实际参数
/*-------------------------------------------
* [2] 加载zImage镜像并初始化images结构
*-----------------------------------------*/
if (bootz_start(cmdtp, flag, argc, argv, &images))
return 1; // 失败时返回非零
/*-------------------------------------------
* [3] 准备执行内核前的关键操作
*-----------------------------------------*/
bootm_disable_interrupts(); // 禁用中断(避免状态不一致)
images.os.os = IH_OS_LINUX; // 强制标记为Linux内核
/*-------------------------------------------
* [4] 分阶段执行内核启动
* 关键状态:
* - OS_PREP: 设置启动参数
* - OS_FAKE_GO: 模拟执行(测试用)
* - OS_GO: 实际跳转到内核
*-----------------------------------------*/
ret = do_bootm_states(cmdtp, flag, argc, argv,
BOOTM_STATE_OS_PREP | // 准备阶段
BOOTM_STATE_OS_FAKE_GO | // 测试执行
BOOTM_STATE_OS_GO, // 正式跳转
&images, 1); // 传入images结构
return ret; // 返回最终状态
}调用bootz_start 函数,加载zImage镜像并初始化images结构。
调用函数 bootm_disable_interrupts关闭中断。
设置 images.os.os 为 IH_OS_LINUX,也就是设置系统镜像为 Linux,表示我们要启动的是 Linux 系统。
调用函数 do_bootm_states 来执行不同的 BOOT 阶段。
典型调用流程如下:
bootz_start 函数
do_bootz函数调用了bootz_srart 函数,bootz_start是 do_bootz的底层支持函数,专门用于 初始化 zImage 格式的 Linux 内核启动环境,核心职责包括:
- 确定内核入口地址(images->ep)
- 验证 zImage 格式有效性
- 保留内核内存区域
- 加载附加镜像(ramdisk/设备树)
bootz_srart 源码
bootz_srart 函数也定义在文件 cmd/bootm.c 中,函数内容如下:
cpp
static int bootz_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[], bootm_headers_t *images)
{
int ret;
ulong zi_start, zi_end; // zImage实际数据范围(去头部后)
/*-------------------------------------------
* [1] 初始化启动状态机(START阶段)
*-----------------------------------------*/
ret = do_bootm_states(cmdtp, flag, argc, argv,
BOOTM_STATE_START, images, 1);
if (ret)
return ret; // 异常直接退出
/*-------------------------------------------
* [2] 确定内核入口地址(ep)
* - 无参数时使用默认load_addr
* - 有参数时解析argv[0]作为地址
*-----------------------------------------*/
if (!argc) {
images->ep = load_addr; // 使用环境变量定义的默认地址
debug("* kernel: default image load address = 0x%08lx\n", load_addr);
} else {
images->ep = simple_strtoul(argv[0], NULL, 16); // 16进制解析
debug("* kernel: cmdline image address = 0x%08lx\n", images->ep);
}
/*-------------------------------------------
* [3] 验证zImage格式并获取数据范围
* - 检查魔数、压缩标志等
* - zi_start/end跳过头部得到纯数据区
*-----------------------------------------*/
ret = bootz_setup(images->ep, &zi_start, &zi_end);
if (ret != 0)
return 1; // 无效镜像
/*-------------------------------------------
* [4] 保留内核内存区域(防其他组件覆盖)
* - 使用LMB(Logical Memory Block)管理器
* - 保护范围:[ep, zi_end)
*-----------------------------------------*/
lmb_reserve(&images->lmb, images->ep, zi_end - zi_start);
/*-------------------------------------------
* [5] 加载附加镜像(ramdisk/设备树)
* - 解析argv[1]/argv[2]作为initrd和FDT地址
* - 若未指定则尝试自动检测
*-----------------------------------------*/
if (bootm_find_images(flag, argc, argv))
return 1;
return 0; // 成功返回
}调用函数 do_bootm_states,执行 BOOTM_STATE_START 阶段。
设置 images 的 ep 成员变量,也就是系统镜像的入口点,使用 bootz 命令启动系统的时候就会设置系统在 DRAM 中的存储位置,这个存储位置就是系统镜像的入口点,因此 images->ep=0X80800000。
调用 bootz_setup 函数,此函数会判断当前的系统镜像文件是否为 Linux 的镜像文件,并且会打印出镜像相关信息。
调用函数 bootm_find_images查找 ramdisk 和设备树(dtb)文件,但是我们没有用到 ramdisk,因此此函数在这里仅仅用于查找设备树(dtb)文件。
bootz_setup 函数
bootz_srart 函数里会调用bootz_setup 函数,bootz_setup是 zImage 启动流程中的 关键验证函数,专门用于:
- 校验 ARM zImage 的合法性(通过魔数检查)
- 提取内核的实际数据范围(zi_start到 zi_end)
- 输出内核内存布局信息(调试用)
bootz_setup函数定义在文件 arch/arm/lib/bootm.c 中。
cpp
/* ARM zImage 头部魔数(小端模式) */
#define LINUX_ARM_ZIMAGE_MAGIC 0x016f2818
/**
* bootz_setup - 验证zImage格式并获取数据范围
* @image: zImage在内存中的起始地址
* @start: 输出参数-内核数据起始地址
* @end: 输出参数-内核数据结束地址
*
* 返回值: 0=成功, 1=魔数校验失败
*/
int bootz_setup(ulong image, ulong *start, ulong *end)
{
/* [1] 映射内存到zImage头部结构 */
struct zimage_header *zi = (struct zimage_header *)map_sysmem(image, 0);
/* [2] 魔数校验(确认是有效的ARM zImage) */
if (zi->zi_magic != LINUX_ARM_ZIMAGE_MAGIC) {
puts("Bad Linux ARM zImage magic!\n");
return 1; // 失败返回
}
/* [3] 提取内核数据范围 */
*start = zi->zi_start; // 内核数据实际起始地址
*end = zi->zi_end; // 内核数据结束地址
/* [4] 打印调试信息(地址布局) */
printf("Kernel image @ %#08lx [ %#08lx - %#08lx ]\n",
image, *start, *end);
return 0; // 成功返回
}如果 Linux 系统镜像正常的话就会输出图:

bootm_find_images函数
bootz_srart 函数里会调用 bootm_find_images函数,bootm_find_images是 U-Boot 启动流程中用于 定位和验证附加启动组件 的核心函数,主要负责:
- 加载并验证 ramdisk/initrd 镜像
- 查找和处理设备树(FDT)
- 管理内存中的组件布局
bootm_find_images函数定义在文件 common/bootm.c 中:
cpp
/**
* bootm_find_images - 定位ramdisk和设备树镜像
* @flag: 启动标志位(如CMD_FLAG_BOOTD)
* @argc: 参数个数
* @argv: 参数数组(如[addr, size, ...])
*
* 返回值: 0=成功, 1=组件加载失败
*/
int bootm_find_images(int flag, int argc, char * const argv[])
{
int ret;
/*-------------------------------------------
* [1] Ramdisk/Initrd 加载
* - 从argv[1]获取地址或自动检测
* - 验证格式并设置images.rd_start/end
*-----------------------------------------*/
ret = boot_get_ramdisk(argc, argv, &images, IH_INITRD_ARCH,
&images.rd_start, &images.rd_end);
if (ret) {
puts("Ramdisk image is corrupt or invalid\n");
return 1;
}
#if defined(CONFIG_OF_LIBFDT)
/*-------------------------------------------
* [2] 设备树(FDT)加载
* - 从argv[2]获取地址或自动检测
* - 设置images.ft_addr/ft_len
*-----------------------------------------*/
ret = boot_get_fdt(flag, argc, argv, IH_ARCH_DEFAULT, &images,
&images.ft_addr, &images.ft_len);
if (ret) {
puts("Could not find a valid device tree\n");
return 1;
}
set_working_fdt_addr((ulong)images.ft_addr); // 激活当前FDT
#endif
return 0; // 成功返回
}调用boot_get_ramdisk函数,查找 ramdisk,但是我们没有用到 ramdisk,因此这部分代码不用管。
调用boot_get_fdt函数,查找设备树(dtb)文件,找到以后就将设备树的起始地址和长度分别写到images 的 ft_addr 和 ft_len 成员变量中。
我们使用 bootz 启动 Linux 的时候已经指明了设备树在DRAM 中的存储地址,因此 images.ft_addr=0X83000000,长度根据具体的设备树文件而定,假设现在使用的设备树文件长度为 0X8C81,那么images.ft_len=0X8C81。
do_bootm_states 函数
do_bootz 最 后 调 用 的 就 是 函 数 do_bootm_states , 而 且 在 bootz_start 中 也 调 用 了do_bootm_states 函数。
do_bootm_states是 U-Boot 启动流程的 中央调度器,通过状态机机制控制:
- 多阶段启动流程(镜像加载、内存管理、OS准备等)
- 错误处理与资源管理
- 最终操作系统跳转
函数源码
do_bootm_states函数定义在文件common/bootm.c 中:
cpp
int do_bootm_states(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[],
int states, bootm_headers_t *images, int boot_progress)
{
boot_os_fn *boot_fn; // OS启动函数指针(如do_bootm_linux)
ulong iflag = 0; // 中断状态保存
int ret = 0, need_boot_fn;
/*-------------------------------------------
* [1] 更新当前状态
*-----------------------------------------*/
images->state |= states;
/*-------------------------------------------
* [2] 按位处理各启动阶段
* 注意:任一阶段失败立即终止流程
*-----------------------------------------*/
/* [2.1] START阶段:基础初始化 */
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);
/* [2.2] FINDOS阶段:定位OS镜像 */
if (!ret && (states & BOOTM_STATE_FINDOS))
ret = bootm_find_os(cmdtp, flag, argc, argv);
/* [2.3] FINDOTHER阶段:加载附加组件 */
if (!ret && (states & BOOTM_STATE_FINDOTHER)) {
ret = bootm_find_other(cmdtp, flag, argc, argv);
argc = 0; // 参数已消费
}
/* [2.4] LOADOS阶段:加载OS到内存 */
if (!ret && (states & BOOTM_STATE_LOADOS)) {
ulong load_end;
iflag = bootm_disable_interrupts(); // 禁用中断
ret = bootm_load_os(images, &load_end, 0);
if (ret == 0) {
// 保留OS内存区域
lmb_reserve(&images->lmb, images->os.load,
(load_end - images->os.load));
} else if (ret != BOOTM_ERR_OVERLAP) {
goto err; // 非内存重叠错误直接退出
}
#if defined(CONFIG_SILENT_CONSOLE) && !defined(CONFIG_SILENT_U_BOOT_ONLY)
// Linux内核静默启动处理
if (images->os.os == IH_OS_LINUX)
fixup_silent_linux();
#endif
}
/* [2.5] RAMDISK阶段:重定位initrd */
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGH
if (!ret && (states & BOOTM_STATE_RAMDISK)) {
ulong rd_len = images->rd_end - images->rd_start;
ret = boot_ramdisk_high(&images->lmb, images->rd_start,
rd_len, &images->initrd_start,
&images->initrd_end);
if (!ret) {
// 更新环境变量
setenv_hex("initrd_start", images->initrd_start);
setenv_hex("initrd_end", images->initrd_end);
}
}
#endif
/* [2.6] FDT阶段:设备树处理 */
#if defined(CONFIG_OF_LIBFDT) && defined(CONFIG_LMB)
if (!ret && (states & BOOTM_STATE_FDT)) {
boot_fdt_add_mem_rsv_regions(&images->lmb, images->ft_addr);
ret = boot_relocate_fdt(&images->lmb, &images->ft_addr,
&images->ft_len);
}
#endif
/*-------------------------------------------
* [3] 获取OS启动函数
*-----------------------------------------*/
if (ret) return ret; // 前期错误直接返回
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE | BOOTM_STATE_OS_BD_T |
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO);
/* [3.1] 检查OS支持性 */
if (boot_fn == NULL && need_boot_fn) {
if (iflag) enable_interrupts();
printf("ERROR: booting os '%s' (%d) is not supported\n",
genimg_get_os_name(images->os.os), images->os.os);
bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);
return 1;
}
/*-------------------------------------------
* [4] 执行OS相关阶段
*-----------------------------------------*/
if (!ret && (states & BOOTM_STATE_OS_CMDLINE))
ret = boot_fn(BOOTM_STATE_OS_CMDLINE, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_BD_T))
ret = boot_fn(BOOTM_STATE_OS_BD_T, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_PREP))
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);
/* [4.1] 模拟执行(调试用) */
#ifdef CONFIG_TRACE
if (!ret && (states & BOOTM_STATE_OS_FAKE_GO)) {
char *cmd_list = getenv("fakegocmd");
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_FAKE_GO,
images, boot_fn);
if (!ret && cmd_list)
ret = run_command_list(cmd_list, -1, flag);
}
#endif
/* [4.2] 最终跳转到OS */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);
err:
/*-------------------------------------------
* [5] 错误恢复
*-----------------------------------------*/
if (iflag)
enable_interrupts(); // 恢复中断状态
return ret;
}函数分析
函数 do_bootm_states 根据不同的 BOOT 状态执行不同的代码段,通过如下代码来判断BOOT 状态:
cpp
states & BOOTM_STATE_XXX在do_bootz 函数中会用到
- BOOTM_STATE_OS_PREP 、
- BOOTM_STATE_OS_FAKE_GO
- BOOTM_STATE_OS_GO
bootz_start 函数中会用到:
- BOOTM_STATE_START这个 BOOT 状态
函数 bootm_start
在处理 BOOTM_STATE_START 阶段,调用函数 bootm_start:
cpp
/* [2.1] START阶段:基础初始化 */
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);bootm_start是 U-Boot 启动流程的 初始化入口函数,负责:
- 清零 images全局结构体,确保启动环境干净
- 初始化内存管理器(LMB),为后续内存保留做准备
- 设置启动校验标志(verify环境变量控制)
- 标记启动阶段(BOOTSTAGE_ID_BOOTM_START)
bootm_start函数定义在文件 common/bootm.c
cpp
/**
* bootm_start - 启动流程初始化函数
* @cmdtp: 命令表指针(未使用)
* @flag: 标志位(未使用)
* @argc: 参数个数(未使用)
* @argv: 参数数组(未使用)
*
* 返回值: 始终返回0(无错误检查)
*/
static int bootm_start(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
/*-------------------------------------------
* [1] 清零全局images结构体
* - 防止残留数据影响本次启动
*-----------------------------------------*/
memset((void *)&images, 0, sizeof(images));
/*-------------------------------------------
* [2] 初始化镜像校验标志
* - 从环境变量verify读取值(默认启用)
* - verify=n 时关闭校验
*-----------------------------------------*/
images.verify = getenv_yesno("verify"); // 返回1=启用,0=禁用
/*-------------------------------------------
* [3] 初始化LMB(Logical Memory Block)内存管理器
* - 记录已占用内存区域(如U-Boot自身)
* - 为后续内核/ramdisk保留内存做准备
*-----------------------------------------*/
boot_start_lmb(&images);
/*-------------------------------------------
* [4] 记录启动阶段标记(调试用)
* - 用于bootstage工具分析启动耗时
*-----------------------------------------*/
bootstage_mark_name(BOOTSTAGE_ID_BOOTM_START, "bootm_start");
/*-------------------------------------------
* [5] 设置初始状态
* - BOOTM_STATE_START是状态机起点
*-----------------------------------------*/
images.state = BOOTM_STATE_START;
return 0; // 无错误检查,始终返回成功
}函数 bootm_os_get_boot_func
函 数 do_bootm_states里调用函数 bootm_os_get_boot_func:
cpp
/*-------------------------------------------
* [3] 获取OS启动函数
*-----------------------------------------*/
if (ret) return ret; // 前期错误直接返回
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE | BOOTM_STATE_OS_BD_T |
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO);bootm_os_get_boot_func 函数定义在文件 common/bootm_os.c 中:
cpp
/**
* bootm_os_get_boot_func - 获取操作系统启动函数(支持重定位)
* @os: 操作系统类型(IH_OS_xxx枚举值)
*
* 返回值: 成功=函数指针, 失败=NULL
*/
boot_os_fn *bootm_os_get_boot_func(int os)
{
/*-------------------------------------------
* [1] 手动重定位处理(某些架构需要)
*-----------------------------------------*/
#ifdef CONFIG_NEEDS_MANUAL_RELOC
static bool relocated; // 重定位标记(仅执行一次)
if (!relocated) {
int i;
/* 遍历函数表,应用重定位偏移 */
for (i = 0; i < ARRAY_SIZE(boot_os); i++)
if (boot_os[i] != NULL)
boot_os[i] += gd->reloc_off; // 函数地址 += 偏移量
relocated = true; // 标记已完成
}
#endif
/*-------------------------------------------
* [2] 返回请求的启动函数
*-----------------------------------------*/
return boot_os[os]; // 直接索引全局数组
}boot_os 是个数组,这个数组里面存放着不同的系统对应的启动函数。 boot_os 也定义在文件 common/bootm_os.c 中,如下所示:
cpp
static boot_os_fn *boot_os[] = {
[IH_OS_U_BOOT] = do_bootm_standalone,
#ifdef CONFIG_BOOTM_LINUX
[IH_OS_LINUX] = do_bootm_linux,
#endif
......
#ifdef CONFIG_BOOTM_OPENRTOS
[IH_OS_OPENRTOS] = do_bootm_openrtos,
#endif
};可以看出来:Linux 系统对应的启动函数: do_bootm_linux。
通过函数 bootm_os_get_boot_func 来查找系统启动函数,参数 images->os.os 就是系统类型,根据这个系统类型来选择对应的启动函数,在 do_bootz 中设置images.os.os= IH_OS_LINUX。
函数返回值就是找到的系统启动函数,这里找到的 Linux 系统启动函数为 do_bootm_linux,因此 boot_fn=do_bootm_linux,后面执行 boot_fn函数的地方实际上是执行的 do_bootm_linux 函数。
BOOTM_STATE_OS_PREP 状态
函 数 do_bootm_states中,处理 BOOTM_STATE_OS_PREP 状态,调用boot_fn.
cpp
/*-------------------------------------------
* [4] 执行OS相关阶段
*-----------------------------------------*/
if (!ret && (states & BOOTM_STATE_OS_CMDLINE))
ret = boot_fn(BOOTM_STATE_OS_CMDLINE, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_BD_T))
ret = boot_fn(BOOTM_STATE_OS_BD_T, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_PREP))
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);我们已经解释过, 执行 boot_fn函数的地方实际上是执行的 do_bootm_linux 函数,do_bootm_linux也是调用 boot_prep_linux 来完成具体的处理过程。
boot_prep_linux是 Linux 内核启动前的 最终准备函数,负责:
- 设置内核启动参数(ATAGS 或设备树)
- 初始化内核命令行
- 处理 initrd/ramdisk 内存布局
- 验证硬件兼容性
boot_prep_linux 主要用于处理环境变量bootargs, bootargs 保存着传递给 Linux kernel 的参数。
cpp
/**
* boot_prep_linux - 为Linux内核启动做最终准备
* @images: 包含所有启动信息的全局结构体
*
* 返回值: 0=成功, 非0=错误码
*/
int boot_prep_linux(bootm_headers_t *images)
{
int ret;
/*-------------------------------------------
* [1] 选择参数传递方式(ATAGS或设备树)
*-----------------------------------------*/
#ifdef CONFIG_OF_LIBFDT
if (images->ft_len) {
/* 使用设备树传递参数 */
ret = image_setup_linux(images);
if (ret)
return ret;
} else
#endif
{
/* 使用传统ATAGS方式 */
setup_start_tag(images->kbd);
if (images->initrd_start) {
setup_initrd_tag(images->kbd,
images->initrd_start,
images->initrd_end);
}
setup_commandline_tag(images->kbd,
images->cmdline_start);
setup_end_tag(images->kbd);
}
/*-------------------------------------------
* [2] 处理静默启动(Silent Boot)
*-----------------------------------------*/
#if defined(CONFIG_SILENT_CONSOLE)
if (getenv_yesno("silent") == 1) {
fixup_silent_linux();
/* 更新命令行参数 */
if (images->cmdline_start)
strcat((char *)images->cmdline_start, " quiet");
}
#endif
/*-------------------------------------------
* [3] 内存保留区同步
*-----------------------------------------*/
#ifdef CONFIG_LMB
/* 确保内核不会覆盖关键区域 */
boot_fdt_add_mem_rsv_regions(&images->lmb, images->ft_addr);
#endif
/*-------------------------------------------
* [4] 硬件兼容性检查
*-----------------------------------------*/
if (images->os.arch != IH_ARCH_DEFAULT) {
printf("Unsupported arch: %d\n", images->os.arch);
return CMD_RET_FAILURE;
}
return 0;
}函数 boot_selected_os
do_bootm_states函数,调用函数 boot_selected_os 启动 Linux 内核:
cpp
/* [4.2] 最终跳转到OS */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);boot_selected_os函数第 4 个参数为 Linux 系统镜像头,
第 5 个参数就是 Linux 系统启动函数:do_bootm_linux。
boot_selected_os 函数定义在文件common/bootm_os.c 中:
cpp
int boot_selected_os(int argc, char * const argv[], int state,
bootm_headers_t *images, boot_os_fn *boot_fn)
{
arch_preboot_os();
480 boot_fn(state, argc, argv, images);
......
return BOOTM_ERR_RESET;
}调用 boot_fn 函数,也就是 do_bootm_linux 函数来启动 Linux 内核。
do_bootm_linux函数
经过前面的分析,我们知道了 do_bootm_linux 就是最终启动 Linux 内核的函数,负责:
- 准备内核启动环境(参数传递、内存布局)
- 执行架构相关的跳转操作
- 处理不同启动阶段的状态标志
do_bootm_linux函数定义在文件 arch/arm/lib/bootm.c
cpp
/**
* do_bootm_linux - Linux内核启动主函数
* @flag: 状态标志位(BOOTM_STATE_xxx的组合)
* @argc: 参数个数(通常已处理)
* @argv: 参数数组(通常已处理)
* @images: 全局启动信息结构体
*
* 返回值: 0=成功, -1=不支持的操作
*/
int do_bootm_linux(int flag, int argc, char * const argv[],
bootm_headers_t *images)
{
/*-------------------------------------------
* [1] 过滤ARM架构不需要的状态
* - BD_T(板级信息表)和CMDLINE已在PREP阶段处理
*-----------------------------------------*/
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -1;
/*-------------------------------------------
* [2] 准备阶段(BOOTM_STATE_OS_PREP)
* - 设置设备树/ATAGS参数
* - 初始化内核命令行
*-----------------------------------------*/
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return 0;
}
/*-------------------------------------------
* [3] 跳转阶段(BOOTM_STATE_OS_GO/FAKE_GO)
* - FAKE_GO用于测试(不实际跳转)
* - GO执行最终跳转
*-----------------------------------------*/
if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
boot_jump_linux(images, flag);
return 0;
}
/*-------------------------------------------
* [4] 默认处理(未明确指定状态时)
* - 执行完整启动流程:准备+跳转
*-----------------------------------------*/
boot_prep_linux(images);
boot_jump_linux(images, flag);
return 0;
}在跳转阶段(BOOTM_STATE_OS_GO/FAKE_GO),调用函数 boot_jump_linux:
boot_jump_linux是 U-Boot 启动 Linux 内核的 最终跳转函数,负责:
- 设置内核启动参数(寄存器传参)
- 处理环境变量覆盖(如 machid)
- 执行架构相关的跳转操作
- 支持模拟启动(测试模式)
cpp
/**
* boot_jump_linux - 跳转到Linux内核的最终函数
* @images: 包含内核地址、设备树等信息的结构体
* @flag: 启动标志(含BOOTM_STATE_OS_FAKE_GO等)
*/
static void boot_jump_linux(bootm_headers_t *images, int flag)
{
/*-------------------------------------------
* [1] 获取板级ID(machid)
* - 默认从gd->bd读取
* - 允许环境变量"machid"覆盖
*-----------------------------------------*/
unsigned long machid = gd->bd->bi_arch_number; // 默认板级ID
char *s = getenv("machid");
if (s) {
if (strict_strtoul(s, 16, &machid) < 0) {
debug("Invalid machid format!\n");
return;
}
printf("Using machid 0x%lx from env\n", machid);
}
/*-------------------------------------------
* [2] 准备跳转参数
* - r0: 固定为0
* - r1: machid(板级标识)
* - r2: 设备树地址或ATAGS参数块地址
*-----------------------------------------*/
void (*kernel_entry)(int zero, int arch, uint params) =
(void (*)(int, int, uint))images->ep; // 强转函数指针
unsigned long r2;
if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)
r2 = (unsigned long)images->ft_addr; // 使用设备树
else
r2 = gd->bd->bi_boot_params; // 使用传统ATAGS
/*-------------------------------------------
* [3] 模拟启动模式(测试用)
* - 打印信息但不实际跳转
*-----------------------------------------*/
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
debug("## Ready to jump: ep=0x%08lx, machid=0x%lx, r2=0x%lx\n",
(ulong)kernel_entry, machid, r2);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
/*-------------------------------------------
* [4] 清理环境并跳转
* - 关闭中断/缓存(arch-specific)
* - 打印最终启动信息
*-----------------------------------------*/
announce_and_cleanup(fake); // 显示"Starting kernel..."消息
if (!fake) {
/* 实际跳转(永不返回) */
kernel_entry(0, machid, r2);
}
}看见最后一行的函数 kernel_entryll了吗?调用 kernel_entry 函数进入 Linux 内核,此行将一去不复返, uboot 的使命也就完成了,它可以安息了!
我也安息了。。。玛卡巴卡,晚安~