产品概述
GC8871是一款高性能刷式直流电机驱动芯片,采用创新的内置电流检测技术,无需外接感测电阻即可实现精确的电流控制。该芯片采用ESOP8封装,工作电压范围6.5-45V,峰值驱动电流达3.6A,特别适合打印机、工业设备和各类机电一体化应用。
核心特性对比
| 特性 | GC8871 | 传统方案 |
|---|---|---|
| 电流检测 | 内置检测,无需外接电阻 | 需要外接感测电阻 |
| 工作电压 | 6.5-45V | 通常较窄 |
| 峰值电流 | 3.6A | 依型号而定 |
| 导通电阻 | 565mΩ(典型) | 通常较高 |
| 休眠电流 | ≤10μA | 通常较高 |
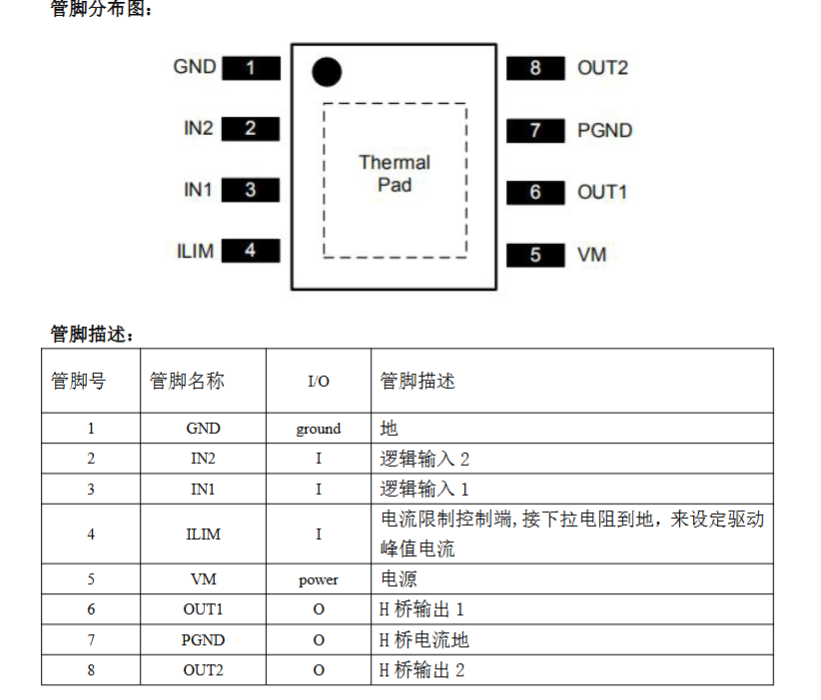
管脚配置与功能
GC8871采用8引脚ESOP封装,各引脚功能如下:
-
GND:系统接地
-
IN2:逻辑输入2,PWM控制
-
IN1:逻辑输入1,PWM控制
-
ILIM:电流限制设置端(关键特色引脚)
-
VM:电机驱动电源(6.5-45V)
-
OUT1:H桥输出1
-
PGND:功率地(低阻抗接地路径)
-
OUT2:H桥输出2
创新电流控制技术
GC8871的最大特色是内置电流检测功能,通过ILIM引脚外接电阻即可设置电流限制阈值:
电流限制计算公式:
ITRIP(A)=64RILIM(kΩ)ITRIP(A)=RILIM(kΩ)64
例如:
-
使用30kΩ电阻时,电流限制约2.13A
-
使用20kΩ电阻时,电流限制约3.2A
这种设计省去了传统方案中的大功率感测电阻,既节省成本又减少PCB空间占用。
电机控制逻辑
| IN1 | IN2 | 电机状态 |
|---|---|---|
| 0 | 0 | 滑行/休眠 |
| 1 | 0 | 正转 |
| 0 | 1 | 反转 |
| 1 | 1 | 刹车 |
PWM控制组合:
| IN1 | IN2 | 功能模式 |
|---|---|---|
| PWM | 0 | 正转快衰减 |
| 1 | PWM | 正转慢衰减 |
| 0 | PWM | 反转快衰减 |
| PWM | 1 | 反转慢衰减 |
关键电气参数
-
驱动性能:
-
导通电阻:高侧300-340mΩ,低侧260-320mΩ
-
死区时间:220ns
-
PWM频率:最高100kHz
-
-
保护特性:
-
过流保护:3.7-6.4A
-
过温保护:155-180℃
-
欠压锁定:6.1-6.4V
-
-
功耗特性:
-
工作电流:3-10mA
-
休眠电流:≤10μA
-
典型应用电路
GC8871的典型应用电路极为简洁:
-
VM接6.5-45V电源,建议并联47μF+0.1μF电容
-
ILIM引脚通过30kΩ电阻接地设置电流限制
-
IN1/IN2接MCU PWM输出
-
OUT1/OUT2直接驱动电机
设计优势分析
-
简化设计:省去外部电流检测电路,BOM成本降低约15%
-
提高可靠性:内置多重保护,故障自动恢复
-
节能高效:休眠模式功耗仅10μA
-
灵活控制:支持快/慢衰减模式,适应不同应用场景
封装信息
GC8871采用标准ESOP8封装:
-
尺寸:4.7-5.1mm × 3.8-4.0mm
-
高度:1.3-1.7mm
-
引脚间距:1.27mm
应用建议
-
工业设备:适合自动化设备中的小型电机驱动
-
打印机:精确控制进纸电机和打印头移动
-
家电:风扇、窗帘电机等需要调速的应用
-
机器人:小型关节电机控制
总结
GC8871通过创新的内置电流检测技术,在保持高性能的同时显著简化了外围电路设计。其宽电压范围、高驱动能力和完善的保护机制,使其成为空间受限且要求高可靠性应用的理想选择。工程师在设计新一代机电系统时,GC8871值得重点考虑。