1 气动设计模块的运行机制
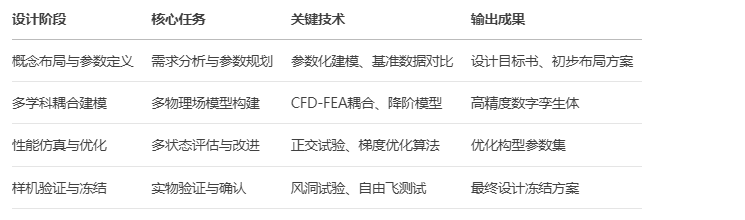
1.1 系统化设计流程
概念布局与参数定义:设计初期基于任务需求确定核心飞行参数,包括目标升阻比、翼载荷范围、功重比指标等关键参数。以涵道共轴双旋翼无人机为例,设计团队需首先明确涵道内径、桨叶弦长、转速范围等基本参数,同时参考已有成熟平台的性能数据进行初步可行性分析。这一阶段还需完成气动布局选型,如选择常规布局、翼身融合布局(BWB)或升力体机身等不同构型,西航一号验证机即采用了"升力体机身+翼身融合+大展弦比机翼+尾撑式尾翼"的复合布局。
多学科耦合建模:进入详细设计阶段后,需建立气动-结构-控制一体化模型。此阶段运用计算流体力学(CFD)模拟流场特性,结合有限元分析(FEA)预测结构变形,形成闭环反馈系统。对于分布式推进的翼身融合无人机,需特别关注边界层吸入(BLI)效应与康达效应的耦合作用机制。研究表明,通过动量源方法(MSM)模拟涵道风扇,可在保证精度的同时显著降低计算成本,其拉力系数误差可控制在3.35%以内。
性能仿真与优化迭代:基于建立的模型进行多状态气动评估,涵盖巡航、爬升、机动等典型飞行状态。针对高空长航时太阳能无人机,需重点分析设计点偏离带来的性能衰减效应,因其在预定设计状态下气动性能优异,但稍偏离该点则显著削弱。优化过程采用自适应参数调整策略,如正交试验法对结构参数进行敏感性分析,确定影响气动特性的关键因子。
样机验证与设计冻结:完成高性能缩比验证机制作,通过雷诺数相似准则开展风洞或自由飞试验。西航一号验证机即采用此方法,成功验证了复杂气动布局的可行性。试验中需特别关注气动弹性响应和实际飞行性能与仿真结果的吻合度,最终完成设计冻结并转入生产阶段。
表:无人机气动设计四阶段工作重点
1.2 耦合机制与工作逻辑
气动载荷诱导结构变形:气动力(升力、阻力、力矩)作用于机体表面,导致机翼、机身等部件发生弹性变形。在低雷诺数飞行环境下,如高空长航时太阳能无人机飞行高度>18,000米时,这种变形效应尤为显著。变形直接改变原始气动外形,特别是大展弦比机翼的弯扭变形可导致翼型实际迎角变化2-5°,显著影响气动性能。
结构变形改变气动特性:变形后的机体表面引起气流重新分布,具体表现为压力场和速度场的改变。涵道无人机的研究表明,螺旋桨与风道顶部的距离变化约为风道弦长的0.5倍时,下部螺旋桨的升力可增加7.7%。这种变化进一步反馈到气动载荷分布,形成闭环反馈回路。柔性结构设计如仿生翼的变形可提升10%-15%的气动效率,但需精确控制变形模式。
控制系统主动补偿:飞控系统通过多传感器融合实时感知气动性能变化,基于在线模型预测控制(MPC)算法生成舵面或动力系统补偿指令。对于采用大小桨布局的多旋翼无人机,控制系统需协调高KV值电机(小桨)与低KV值电机(大桨)的转速配比,前者主要提供升力,后者负责姿态控制力矩。主动气动弹性机翼则通过分布式作动器实时调整翼面形状,抑制不利变形。
2**.**设计核心要点
2.1 布局创新与构型优化
高效推进集成:现代无人机广泛采用创新推进布局以提升气动效率。涵道共轴双旋翼布局通过涵道内壁设计增加约30%的等效升力面积,同时降低叶尖涡损失,其气动效率显著优于传统开式旋翼。翼身融合(BWB)布局结合分布式推进系统则展现出更大优势,研究表明安装D80涵道风扇的BWB无人机可提升16%的升力系数和10%的升阻比,这主要源于动力系统的抽吸作用提高了机身附近流速并抑制了展向流动。边界层吸入(BLI)技术进一步利用机体发展的边界层气流,降低发动机需用功率,但需精确设计进气道以防止流动分离。
气动部件协同设计:任务载荷与发动机附件需采用共形整流设计以最小化气动干扰。先进的翼身融合无人机将任务载荷嵌入机身头部下底面凹陷区,实现底部齐平的共形连接;发动机空滤则包裹于流线型防雨罩内,通过0.1-1cm的间隙进气,既防雨又减阻。尾翼布置需避开发动机尾流区,西航一号采用的双尾撑+高平尾布局,有效避开了融合体尾部分离流及螺旋桨滑流,提升了纵向稳定性。
多旋翼创新布局:多旋翼无人机通过桨叶尺寸优化配置突破性能瓶颈。专利CN104925248B提出的大小桨交错布局,采用15-18寸小桨配高KV值电机(260-450 KV)与25-30寸大桨配低KV值电机(100-230 KV)的组合,小桨专注升力生成,大桨提供姿态控制力矩。这种布局较传统均一布局提升约20%的载重能力,同时更高效利用机体面积。
表:创新布局气动性能对比

2.2 参数优化与性能平衡
结构参数敏感性:涵道无人机的结构参数需精细匹配,研究表明:螺旋桨间距增加0.055倍弦长,上部螺旋桨升力可提升1.3%;风道弦长增加35.3%,风道结构升力激增150.6%,整机升力提升15.7%。这些参数调整需基于正交试验法进行敏感性排序,确定影响气动特性的主次因子。对于高空长航时太阳能无人机,需特别优化低雷诺数翼型,联合MATLAB和XFOIL的优化方法使HM114翼型升力系数提高12.38%,升阻比增加14.03%。
轻量化与刚度匹配:结构设计需平衡重量与刚度矛盾。太阳能无人机的结构面密度需控制在常规燃油无人机的5%以下,翼载荷仅为全球鹰的1/20。这要求采用碳纤维复合材料并进行针对性铺层优化,在机翼根部增加±45°铺层比例以提高抗扭刚度,翼尖区域则采用单向铺层减重。同时需通过拓扑优化技术去除冗余材料,实现结构效率最大化。
动力参数协同:动力系统需与气动外形高度协同。分布式推进BWB无人机的涵道风扇尺寸选择至关重要,在同等推力下,D80涵道风扇因桨盘载荷更大,进出口静压较小,气流流速较高,相比D150风扇可提升15%的升阻比。起飞阶段增大动力系统推力可降低机身上表面气流分离风险,提高可用起飞重量。多旋翼无人机的电机KV值与桨叶尺寸需严格匹配,高KV值电机驱动小尺寸桨叶实现快速响应,低KV值电机驱动大桨叶提供高效巡航。
2.3 特殊环境适应性设计
低雷诺数效应应对:高空长航时无人机在18,000米以上高空飞行时,面临极低雷诺数环境(通常低于500,000),流动易处于层流状态,抗逆压梯度能力弱,易发生流动分离。设计时需采用前缘缝翼、湍流带等转捩控制装置,或设计低雷诺数专用翼型。太阳能无人机的气动设计需遵循单点设计思想,在预定设计状态优化性能,但必须考虑设计点偏离带来的性能衰减效应。翼型优化时需平衡层流区域范围与分离风险,HM114翼型通过优化提升低雷诺数性能,将失速迎角延至12°。
气动弹性剪裁:大展弦比柔性机翼需考虑静气动弹性变形补偿。设计阶段采用负扭转变形预补偿策略,即地面状态下预设正扭转,在空中气动载荷作用下恢复至理想扭转分布。英国"西风"太阳能无人机即采用此技术,其机翼展弦比超过30:1。同时需精确预测颤振边界,通过质量平衡和刚度分布优化将颤振临界速度提升至飞行包线1.3倍以上。复合材料铺层顺序对颤振特性影响显著,需通过气动弹性剪裁优化各铺层角度比例。
多状态性能优化:无人机需在复杂飞行环境中保持性能稳定。针对高原起降场景,需优化增升装置设计,如采用全翼展襟翼增加45%的起飞升力;针对海上盐雾环境,需特别设计防腐前缘装置。氢能源长航时无人机则需平衡燃料电池布局与气动外形,将氢气罐集成于机体内腔而不破坏流线型。
2.4 控制集成与飞行品质保障
气动特性在线辨识:先进飞控系统集成实时气动参数辨识模块,基于扩展卡尔曼滤波(EKF)或神经网络算法,根据传感器数据在线更新气动模型。这对于遭遇突风或结冰等气动特性变化的场景至关重要。控制律需适应气动中心偏移,当结构变形导致焦点移动时,在线修正控制增益以保持稳定裕度。
主动流动控制:结合智能材料作动器实现流动主动控制。压电纤维复合材料(MFC)作动器可嵌入机翼前缘,通过高频微幅振动抑制流动分离;形状记忆合金(SMA)则用于驱动后缘变弯度,实现连续气动外形调整。在起飞阶段,通过动态吹气控制延缓机翼失速,可使失速迎角延迟2-4°,显著提升安全裕度。
动力分配策略:多动力系统无人机需优化动力分配。大小桨布局的多旋翼无人机中,控制系统需动态分配小尺寸桨(高KV电机)与大尺寸桨(低KV电机)的扭矩指令:前者工作在高转速段提供主体升力,保留少部分转速裕量辅助姿态控制;后者负责提供俯仰、横滚、偏航通道的主控力矩。这种分工充分发挥了不同动力单元的特性优势,提升了系统整体效率。
3 技术难点与前沿解决方案
3.1 非线性耦合挑战
复杂流固耦合:气动-结构耦合效应在大变形柔性无人机上呈现强非线性特征。传统线性理论在预测大展弦比太阳能机翼变形时误差可达30%,原因在于几何非线性(大变形改变气动外形)与气动非线性(流动分离、动态失速)的交互作用。复合材料各向异性和粘弹性行为进一步增加材料非线性复杂性。这种多重非线性耦合导致高空长航时无人机在湍流中的载荷预测异常困难。
前沿解决路径:采用非线性本征正交分解(POD)方法建立降阶模型,结合计算流体力学/计算结构力学(CFD/CSD)紧耦合迭代策略。基于GPU加速的实时仿真技术(如NVIDIA SimNet)可将计算时间从数天缩短至数小时。深度神经网络代理模型通过迁移学习策略,将高精度仿真数据映射为实时预测模型,有效捕捉非线性耦合机制。
3.2 计算效率与精度平衡
多尺度仿真困境:高保真气动-结构耦合仿真面临计算资源瓶颈。全耦合CFD-FEA瞬态分析单次工况耗时可达数天,而设计优化需数百次迭代。时间尺度不匹配加剧计算负担:气动响应为毫秒级,结构动态响应为秒级,控制系统则介于两者之间。传统单一时间步长难以协调多物理场同步求解。
高效数值策略:创新性采用多尺度建模方法:局部关键区域(如翼根、发动机舱)采用SST k-ω湍流模型精细模拟;全局流场则使用欧拉方程结合边界层修正。结构模型实施子结构模态综合法(CMS),仅保留主模态自由度。基于机器学习的代理模型(如高斯过程回归、深度神经网络)通过有限高精度样本训练,实现秒级预测气动特性。NASA开发的自适应网格技术可动态加密分离流区域,显著提升计算效率。
3.3 实验验证与不确定性管理
动态测试壁垒:气动-结构耦合效应的地面验证面临测试技术瓶颈。风洞实验中需同步测量结构变形(光纤光栅传感器)与流场信息(粒子图像测速技术PIV),但传感器布线影响气动外形,支撑干扰难以消除。缩比自由飞验证中难以同时满足雷诺数相似和弗劳德数相似,导致气动弹性模拟失真。西航一号验证机采用"雷诺数相同"相似准则,虽简化了试验设计,但无法完全模拟全尺寸气动弹性行为。
不确定性量化技术:基于蒙特卡洛方法和多项式混沌展开技术量化制造公差与材料性能分散性影响。复合材料铺层角度±3°偏差可导致颤振速度变化达12%。数字孪生技术融合传感器数据实时修正仿真模型,如压差传感器监测机翼载荷分布,结合应变计数据在线更新结构变形预测。英国"西风"太阳能无人机即采用此技术管理飞行中的不确定性风险。
3.4 多学科优化协同
冲突目标协调:气动效率与结构强度存在固有矛盾:高展弦比机翼提升升阻比,但增加结构重量并降低颤振速度。翼身融合布局的载重能力与气动外形平滑度难以兼顾,任务载荷嵌入导致局部流动畸变。动力系统布局中,涵道风扇尺寸减小可降低重量,但增加桨盘载荷导致效率下降。
智能优化策略:采用多目标遗传算法(如NSGA-III)结合梯度优化算法的混合策略。气动-结构协同优化中,引入帕累托前沿分析技术揭示目标间的权衡关系。基于Kriging代理模型的自适应优化循环大幅减少高保真仿真调用次数。美国"太阳神"太阳能无人机即采用此方法,实现机翼平面形状、弯扭分布和结构尺寸的同步优化,在升阻比提升15%的同时控制重量增长不超过5%。
