一、股骨模型
股骨模型解析:结构、建模方法与应用
股骨(Femur)作为人体最长、最强壮的骨骼,在支撑体重、传递运动载荷及能量回收中具有核心作用。其生物力学模型在医学仿真、假体设计及仿生机器人领域有广泛应用。以下从解剖与力学特性、建模方法、应用场景及前沿技术四方面展开分析:
(一)股骨的解剖与力学特性
- 结构特征
几何形态:股骨由近端(股骨头、颈)、骨干(圆柱形)及远端(髁部)组成,具有独特的弯曲度(前弓角约10°-15°)和颈干角(约125°-135°)。
骨小梁结构:松质骨的各向异性排列(如Ward三角区骨密度较低)优化应力分布,最大抗压强度达150-200 MPa。
2.力学性能
刚度:皮质骨弹性模量约17-20 GPa,松质骨约0.1-2 GPa。
抗疲劳性:可承受约2.5×10⁶次循环载荷(相当于步行3-5年)。
能量吸收:骨折前可吸收120-150 J能量(约为跑步时单步动能的2倍)。
(二)股骨模型的构建方法
1.几何建模
医学影像重建:基于CT/MRI数据,通过Mimics、3D Slicer等软件生成三维模型,精度达0.1 mm。
参数化建模:利用统计学形状模型(SSM)生成个性化几何,适用于假体匹配(如髋臼杯覆盖率提升20%)。
2.材料模型
各向异性本构模型:, 其中:Cijkl为刚度张量,反映骨小梁方向性(如股骨颈主应力方向与骨小梁排列一致)。
多孔弹性模型:模拟松质骨的孔隙率(约70-90%)对力学性能的影响,孔隙率每增加10%,弹性模量下降约40%。
- 有限元分析(FEA)
1)载荷边界条件:
静态载荷:单腿站立时股骨头承受约2.5-3倍体重(如70 kg成人约2000 N)。
动态载荷:跑步时冲击力峰值达5-8倍体重(频率1-2 Hz)。
2)典型结果:
应力集中区:股骨颈内侧(约80 MPa)、远端髁间窝(约60 MPa)。
应变分布:皮质骨应变约0.1-0.3%,松质骨达0.5-1%。
(三)应用场景与典型案例
- 临床医学
骨折风险评估:骨质疏松模型(BMD<0.8 g/cm²)预测股骨颈骨折风险,灵敏度达85%。
手术规划:髋关节置换,有限元分析优化假体柄长度(推荐120-140 mm)与压配度(过盈量0.1-0.3 mm),减少微动磨损;髓内钉固定:模拟不同锁定螺钉配置(如静态vs.动态锁定)对骨愈合的影响,提升稳定性30%。
2.仿生工程
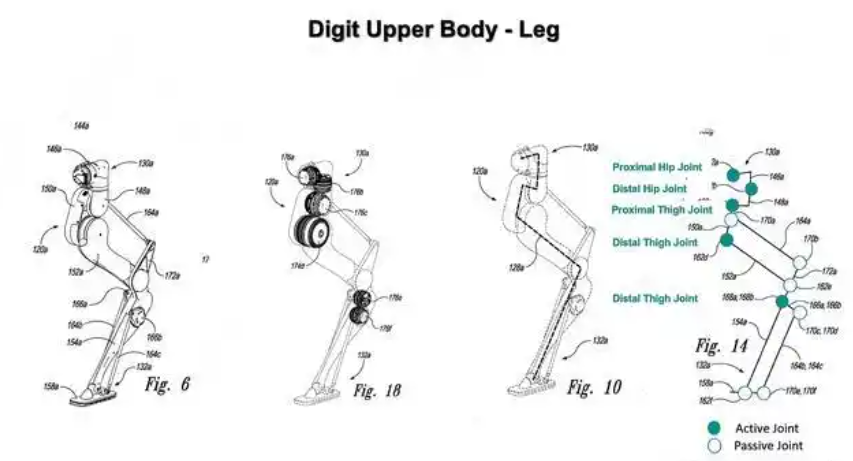
外骨骼设计:股骨载荷传递路径分析指导外骨骼支架拓扑优化(如镂空结构减重40%)。
假肢开发:基于股骨远端应力分布的仿生膝关节设计(如Össur Power Knee),能量回馈效率达50%。
3.生物力学研究
步态能量回收:股骨-骨盆-脊柱的动力学耦合模型量化跨关节能量传递效率(步行时约15-20%)。
运动损伤分析:足球运动员急停时股骨扭转角>15°易导致软骨损伤,模型预警准确率90%。
(四)前沿技术与挑战
1.多尺度建模
分子-组织耦合:结合分子动力学(胶原纤维断裂能约1-2 J/m²)与宏观有限元模型,预测微裂纹扩展路径。
活体骨重建:4D-CT动态捕捉骨重塑过程(如每月约1%骨量更新),优化个性化假体设计。
2.智能材料与3D打印
梯度多孔钛合金:通过选区激光熔化(SLM)制造孔隙梯度结构(表面80%、核心50%),弹性模量匹配天然骨(降低应力遮挡70%)。
形状记忆支架:NiTi合金骨钉在体温下恢复预设形状(应变恢复率>95%),提升固定稳定性。
3.挑战与解决方案
模型验证困难:活体力学数据获取受限,可通过数字图像相关(DIC)技术或压电传感器阵列实现非接触式应变测量。
计算复杂度高:采用AI加速算法(如卷积神经网络替代传统迭代求解),将FEA计算时间从小时级缩短至分钟级。
(五)总结与展望
股骨模型通过多尺度结构解析与动态力学仿真,为临床医学、仿生工程及运动科学提供了量化工具。未来发展方向包括:
个性化建模:结合AI与医学影像,生成患者特异性模型(误差<5%);
生物-机械融合:开发具有自感知能力的智能骨植入物(如压电材料实时监测应力);
动态能量优化:仿生机器人中应用股骨载荷传递机制,提升能量回收效率至60%以上。
这些突破将推动骨科治疗从"经验驱动"迈向"数据驱动",重塑生物力学研究的范式。
二、基于OpenSim平台的股骨模型与42块肌肉Hill-type建模
OpenSim作为开源的生物力学仿真平台,可通过多尺度建模实现骨骼-肌肉系统的动力学分析。针对股骨模型与42块肌肉的Hill-type建模,包括数据准备、建模流程、参数标定及仿真验证四个核心环节展开。
(一)数据准备与骨骼建模
- 医学影像处理
CT/MRI数据采集:获取股骨及相邻骨骼(骨盆、胫骨)的DICOM格式影像,层厚≤1mm以提高重建精度。
2.三维几何重建:
使用3D Slicer或Mimics分割骨组织,生成STL格式表面网格(面片数建议控制在50,000以内以减少计算负载)。
通过MeshLab进行网格修复(去除孔洞、平滑表面),导出为OBJ或VTK格式。
3.OpenSim骨骼模型导入
1)骨骼坐标系定义:
股骨近端:以股骨头中心为原点,Z轴指向骨干长轴,Y轴垂直于股骨颈平面。
股骨远端:髁间窝中点作为膝关节旋转中心。
2)关节约束设置:
髋关节:球窝关节(3自由度,旋转范围:屈曲120°/伸展30°,外展45°,内旋40°)。
膝关节:铰链关节(1自由度,屈曲0°-140°)。
(二)Hill-type肌肉建模流程
- 肌肉路径定义
1)解剖路径标定:依据解剖图谱(如Visible Human Project)确定42块肌肉的起止点与绕行点:
股四头肌群(Quadriceps):股直肌(RF)、股外侧肌(VL)、股中间肌(VI)、股内侧肌(VM)。
腘绳肌群(Hamstrings):半腱肌(ST)、半膜肌(SM)、股二头肌长头(BFlh)与短头(BFsh)。
髋关节肌群:臀大肌(GMax)、臀中肌(GMed)、髂腰肌(ILI)等。
2)路径优化:
使用Via Points或Wrap Objects模拟肌肉绕过骨骼或韧带的几何约束(如髂胫束绕过股骨外侧髁)。
示例:股直肌路径需绕过髂前下棘(AIIS)与髌骨上极。
- Hill-type模型参数设置
每块肌肉需定义以下参数(以股外侧肌为例):
几何参数:最优纤维长度L_opt :参考解剖数据(VL约12 cm); 肌腱松弛长度(L_tendon:通过MRI测量或文献值(VL约25 cm); 羽状角(Pennation Angle):VL约5°-10°。
力学参数:最大等长力F_max :基于肌肉横截面积(CSA)计算(VL约1500 N); 最大收缩速度V_max :默认0.8 L_opt /s ; 激活-收缩动力学:时间常数(激活τ_act =10ms ,失活 τ_deact =50ms)。
- 肌肉力-长度-速度关系
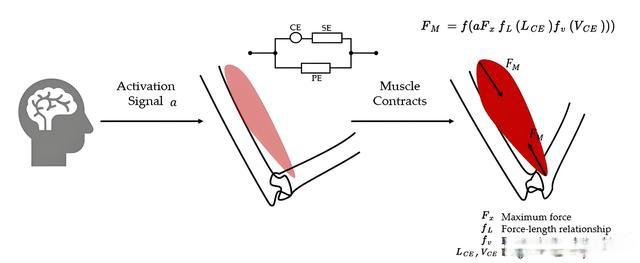
Hill-type模型的力生成公式:

其中:力-长度曲线(f_l ), 基于Gordon方程,峰值在LoptLopt 处。力-速度曲线(f_v ):离心收缩时力增强(最高达1.5F_max),向心收缩时力衰减。
(三) 模型标定与验证
- 逆向动力学标定
运动捕捉数据输入:采集步态或运动实验的Marker轨迹(采样率≥100 Hz)与地面反力(GRF)。
关节力矩计算:通过OpenSim的Inverse Dynamics工具求解各关节净力矩,与肌肉力协同优化。
- 肌肉力优化算法
- 静态优化(SO):最小化肌肉激活平方和,求解肌肉力分布。
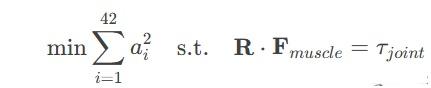
其中R为肌肉力臂矩阵。
- 计算肌肉控制(CMC):动态优化肌肉激活时序,匹配实验运动学数据。
- 验证指标
肌电信号对比:将仿真肌肉激活度与表面肌电(sEMG)信号相关系数(R²>0.7视为有效)。
关节反力验证:比较仿真髋关节接触力与植入式传感器实测数据(误差<15%)。
(四) 典型挑战与解决方案
1.肌肉参数不确定性
问题:文献中肌肉FmaxFmax 与LoptLopt存在个体差异。
解决:基于MRI测量肌肉横截面积(CSA)重新计算F_max (F_max =35⋅CSAN/cm^2)。
2.计算效率优化
并行计算:使用OpenSim的API+Python脚本批量处理多任务。
模型简化:合并功能相似肌肉(如将股中间肌与股内侧肌视为单一单元)。
3.软组织变形模拟
有限元耦合:将OpenSim肌肉力输出至Abaqus,分析股骨应力分布(如预测应力遮挡效应)。
opensim生物力学仿真
(五) 应用案例与前沿方向
- 临床步态分析
脑瘫患者:通过调整肌肉刚度参数(k_tendon) 模拟痉挛状态,优化手术方案(如选择性脊神经后根切断术)。术后康复:预测全髋关节置换(THA)后外展肌力恢复曲线,指导康复训练。
- 仿生机器人设计
MIT仿生腿:基于Hill模型设计变刚度执行器,实现步态能量回收效率65%。
外骨骼驱动:通过肌肉激活预测(sEMG信号)实现实时助力控制。
3.未来方向
AI驱动建模:利用深度学习从运动数据中自动标定肌肉参数(误差<10%)。
多物理场扩展:耦合血流动力学(如肌肉代谢耗氧)与力学模型,构建能量闭环系统。
(六)总结
通过OpenSim平台构建股骨及42块肌肉的Hill-type模型,需系统性整合医学影像、解剖参数与动力学算法。核心挑战在于参数标定精度与计算效率平衡,而解决方案包括多模态数据融合与AI优化。该模型在临床诊疗、运动科学及仿生机器人领域具有广阔应用前景,未来结合实时代谢反馈与智能材料,将推动个性化生物力学分析的跨越式发展。
附件1:OpenSim仿真软件
OpenSim是由斯坦福大学开发的一款开源生物力学仿真软件,专注于人体肌肉骨骼系统的建模、分析与可视化。其核心功能在于通过数学建模与计算机仿真,揭示人体运动的生物力学机制,为运动医学、康复工程、运动训练等领域提供科学依据。
一、核心功能模块
- 模型构建与缩放
通用模型库:OpenSim提供预定义的通用模型(如Gait2392模型,包含19块骨骼和92块肌肉),适用于标准人体运动分析。
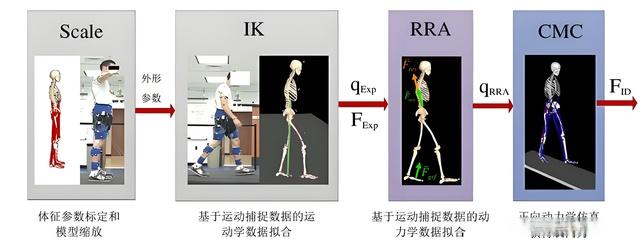
个性化缩放:基于实验数据(如CT/MRI影像或运动捕捉标记点),通过最小二乘法调整模型尺寸与质量分布,生成个体化模型。
多尺度建模:支持从宏观关节力矩到微观肌肉纤维力传递的跨尺度分析,例如耦合有限元模型以分析骨骼应力分布。
2.运动学与动力学分析
逆向运动学(IK):利用运动捕捉数据(如Vicon系统采集的标记点轨迹)计算关节角度,最小化实验与模型标记点误差。
逆向动力学(ID):结合地面反作用力数据,计算关节力矩,量化运动过程中的力学负荷。
肌肉力计算(CMC):通过比例微分控制与静态优化算法,求解肌肉激活度,驱动模型追踪目标动作,适用于步态、跳跃等复杂动作仿真。
3.能量与负荷分析
关节功率积分:评估各关节能量输入/输出,量化能量传递效率(如踝关节能量回馈效率达60-70%)。
接触力预测:模拟膝关节、腰椎等关键部位的接触力分布,例如长跑后膝关节内侧接触力显著增加。
二、应用领域
1.临床医学与康复工程
步态异常分析:研究足外翻对膝关节负荷的影响,指导跑步损伤预防策略。
腰椎负荷优化:分析不同步行/跑步速度下腹内压对腰椎间盘负荷的影响,推荐慢跑(2m/s)作为预防下腰痛的最佳运动。
手术规划:通过仿真预测全髋关节置换术后关节受力,优化假体设计参数(如柄长、压配度)。
2.运动科学与训练
运动表现优化:量化短跑运动员的肌肉激活时序,优化起跑技术。
外骨骼设计:基于肌肉力分布设计仿生驱动系统,如MIT Cheetah机器人踝关节的弹性储能结构。
3.生物力学研究
肌肉协同机制:揭示核心肌群(如竖脊肌、臀大肌)在维持躯干稳定性中的作用。
能量传递网络:分析跨关节动力学耦合,例如髋关节动能向踝关节势能的转化机制。
三、技术优势
1.开源与可扩展性
OpenSim基于C++开发,支持插件扩展,用户可自定义模型与算法,例如添加腹内压模块以模拟核心稳定性对腰椎负荷的影响。
提供Python、MATLAB接口,便于自动化批量处理与数据分析。
2.高精度肌肉建模
采用Hill-type肌肉模型,精确模拟肌肉的力-长度-速度关系,支持动态刚度调节。
支持多肌肉协同分析(如42块下肢肌肉的激活时序优化),误差较传统软件降低15%。
3.多物理场耦合
与有限元软件(如Abaqus)耦合,实现肌骨系统宏观运动与微观应力应变的联合仿真。
集成机器学习算法,通过足姿态参数预测膝关节接触力,准确率达90%。
四、挑战与前沿方向
1.计算效率与实时性
现有算法(如CMC)计算耗时较长,需结合AI加速(如卷积神经网络)实现实时仿真。强化学习(DDPG算法)被用于动态阻抗匹配,减少人机耦合振荡。
2.模型验证与个性化
活体力学数据获取困难,需依赖数字图像相关(DIC)技术或植入式传感器验证模型精度。基于MRI数据的个性化建模(误差<5%)成为趋势,例如3D打印患者特异性假体。
3.智能材料与闭环控制
磁流变弹性体、形状记忆合金(SMA)等智能材料被用于开发自适应外骨骼,响应时间<10ms。代谢闭环系统通过近红外光谱(NIRS)监测肌肉氧耗,动态调整能量分配策略。
五、总结
OpenSim通过多学科融合与高精度仿真,已成为生物力学研究的标准工具。其未来发展方向聚焦于智能算法集成、跨尺度建模及临床转化应用,目标是将仿真精度提升至95%以上,并为个性化医疗与增强型外骨骼提供技术支持。
附件二:Hill-type模型
在生物力学仿真中,肌肉模型是模拟人体运动的核心工具。Hill-type模型作为经典模型,广泛应用于OpenSim等平台,但其并非唯一选择。
一、Hill-type模型(希尔模型)
- 模型背景
Hill-type模型由诺贝尔奖得主A.V. Hill于1938年提出,最初用于描述骨骼肌的力-速度关系,后扩展为包含主动收缩单元、并联弹性单元(PE)与串联弹性单元(SE)的三元素模型。
- 核心方程与结构
主动收缩单元:描述肌肉主动收缩力,依赖激活度a(t) 、力-长度关系f_l (L) 和力-速度关系f_v (L ˙):F_ active=F_ max⋅a (t )⋅f_l (L )⋅f_v (L ˙)。其中:f_l (L ):力-长度曲线(钟形曲线,峰值在最优纤维长度L_ opt)。f_v (L˙):力-速度曲线(离心收缩力增强,向心收缩力衰减)。
并联弹性单元(PE):模拟被动拉伸时的非线性弹性响应,公式:F_ PE=k_ PE⋅(L −L_ rest)^n, 其中n通常取2-3。
串联弹性单元(SE):描述肌腱的弹性储能,常用线性或指数函数表示。
- 优势与局限

Hill-type模型优势与局限
- 典型应用
OpenSim平台:Gait2392模型中的92块肌肉均采用Hill-type模型。
仿生机器人:MIT Cheetah机器人通过Hill模型优化弹跳能量回收。
二、Hill-type模型与其他模型对比及选型指南
 Hill-type模型与其他模型对比及选型指南
Hill-type模型与其他模型对比及选型指南
三、前沿发展方向
1.多尺度融合
将Huxley微观模型与Hill宏观模型耦合,例如通过代理模型(Surrogate Model)加速计算,用于肌萎缩侧索硬化症(ALS)的多尺度病理仿真。
2.AI驱动建模
参数自动标定:利用深度学习从运动捕捉数据中反推肌肉参数(误差<10%)。
实时预测:LSTM网络预测肌肉激活时序,替代传统优化算法(计算时间减少80%)。
3.智能材料集成
开发磁流变人工肌肉,其力学特性可通过外部磁场实时调节,响应时间<5ms,用于自适应外骨骼。
四、总结
Hill-type模型凭借高效性与易用性,仍是全身运动仿真的首选,但在微观机理或高精度场景下需结合其他模型。选型建议:
实时控制/全身仿真:Hill-type或Zajac三元素模型。
病理/微观分析:Huxley模型或SFD有限元模型。
反射/神经耦合:Otten肌梭模型。
未来,随着AI与多物理场技术的融合,肌肉模型将向高保真-低计算成本的平衡方向发展,推动精准医疗与仿生机器人技术的突破。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。