一、运行方式
1. 传感器数据采集
陀螺仪:实时测量机体三轴角速度(roll/pitch/yaw)。
加速度计:捕获三轴线加速度(X/Y/Z方向)。
示例:ER-MIMU-064 IMU的陀螺仪量程达±400 deg/s,加速度计量程±30g,适应高速机动。
2. 姿态解算(初始融合)
角速度积分计算瞬时姿态角(欧拉角或四元数),加速度计辅助重力方向校准。
关键算法:互补滤波快速融合原始数据,输出初步姿态。
3. 多传感器深度融合
扩展卡尔曼滤波器(EKF):为核心融合框架。
预测:基于IMU数据推算下一时刻状态(位置、速度、姿态)。
更新:引入GPS、磁力计、视觉数据修正预测误差。
非线性处理:通过雅可比矩阵线性化运动模型,解决无人机非线性动力学问题。
协同导航(如北航AeroDuo方案):
高空无人机提供全局地图,低空无人机执行精细避障,通过概率分布图共享提升定位效率。
4. 运动状态估计
加速度二次积分得位移,结合角速度解算全局位置。
难点:积分累积误差需通过GPS或视觉观测周期性校正。
5. 导航控制闭环
输出姿态/位置数据至飞控系统,结合路径规划算法实时生成轨迹。
二、技术要点与难点
1. 多源异构数据融合
时间同步:IMU高频数据(≥100Hz)与低频GPS(10-20Hz)需硬件级同步,时延>1ms即导致轨迹漂移。
空间校准:传感器安装偏移需标定补偿,如北航方案通过正射投影消除相机畸变。
算法鲁棒性:EKF依赖线性化近似,强机动下雅可比矩阵更新滞后可能发散。
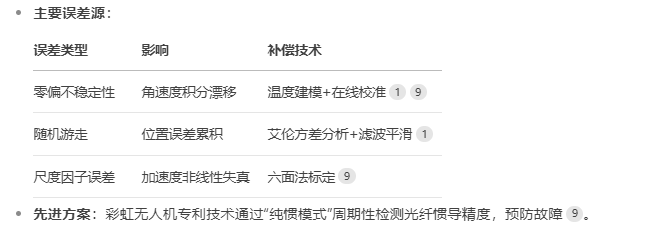
2. 姿态解算与误差补偿
3. 环境适应性挑战
抗干扰设计:
电磁干扰:eVTOL采用频段动态分配技术保障GNSS信号稳定。
复杂地形:地磁/惯性融合导航利用磁异常梯度修正惯导误差,减少对先验地磁图的依赖。
极端环境:宽温范围(-40°C至+80°C)需温度补偿算法,防止器件漂移。
动态响应:要求处理延时<10ms(eVTOL避障场景),需边缘计算加速。
4. 协同导航与集群技术
高低空协同:
高空机生成概率分布图,低空机用A*算法规划航点+强化学习避障。
难点:多机通信时延需优化匈牙利任务分配算法,避免目标重叠。
集群定位:惯导/测距/视觉融合算法支撑编队飞行,抗拒止导航需冗余校验。
5. 端到端规划集成
YOPO等新型规划器:直接融合IMU数据与深度图像,省去建图环节。
难点:感知噪声导致轨迹抖动,需特权学习引入仿真真值训练模型。
三、总结:前沿趋势与挑战
轻量化高精度:MEMS工艺推动IMU尺寸<40mm³,但零偏稳定性<1 deg/hr仍需量子陀螺突破。
智能融合架构:LLM驱动多模态推理提升环境理解,但算力功耗制约机载部署。
拒止环境导航:地磁/惯导/视觉紧耦合是主流方向,磁异常梯度算法显著降低对卫星依赖。
