嵌入式 Linux 深度解析:架构、原理与工程实践(增强版)
目录
- [嵌入式 Linux 深度解析:架构、原理与工程实践(增强版)](#嵌入式 Linux 深度解析:架构、原理与工程实践(增强版))
-
- [第一章 嵌入式 Linux 基础概念](#第一章 嵌入式 Linux 基础概念)
-
- [1.1 定义与核心特征](#1.1 定义与核心特征)
- [1.2 典型架构栈深度解析](#1.2 典型架构栈深度解析)
- [第二章 Linux 文件系统深度剖析](#第二章 Linux 文件系统深度剖析)
-
- [2.1 FHS 标准与嵌入式适配](#2.1 FHS 标准与嵌入式适配)
- [2.2 关键目录功能与实战操作](#2.2 关键目录功能与实战操作)
-
- [2.2.1 /proc:内核实时信息接口](#2.2.1 /proc:内核实时信息接口)
- [2.2.2 /sys:设备驱动控制接口](#2.2.2 /sys:设备驱动控制接口)
- [第三章 嵌入式 Linux 工作原理](#第三章 嵌入式 Linux 工作原理)
-
- [3.1 启动流程全解析](#3.1 启动流程全解析)
-
- [3.1.1 Bootloader 阶段(以 U-Boot 为例)](#3.1.1 Bootloader 阶段(以 U-Boot 为例))
- [3.1.2 内核初始化阶段](#3.1.2 内核初始化阶段)
- [3.1.3 用户态启动阶段(systemd)](#3.1.3 用户态启动阶段(systemd))
- [3.2 设备驱动模型实战](#3.2 设备驱动模型实战)
-
- [3.2.1 字符设备驱动代码(mydrv.c)](#3.2.1 字符设备驱动代码(mydrv.c))
- [3.2.2 驱动编译与测试](#3.2.2 驱动编译与测试)
- [第四章 开发工具链实战](#第四章 开发工具链实战)
-
- [4.1 交叉编译环境搭建](#4.1 交叉编译环境搭建)
-
- [4.1.1 Yocto 项目核心概念](#4.1.1 Yocto 项目核心概念)
- [4.1.2 Yocto 构建步骤](#4.1.2 Yocto 构建步骤)
- [4.1.3 自定义应用集成](#4.1.3 自定义应用集成)
- [4.2 调试技术详解](#4.2 调试技术详解)
-
- [4.2.1 GDB+gdbserver 远程调试](#4.2.1 GDB+gdbserver 远程调试)
- [4.2.2 内核调试技术](#4.2.2 内核调试技术)
- [第五章 嵌入式 Linux 优势与挑战](#第五章 嵌入式 Linux 优势与挑战)
-
- [5.1 核心优势解析](#5.1 核心优势解析)
- [5.2 典型挑战与解决方案](#5.2 典型挑战与解决方案)
-
- [5.2.1 实时性优化](#5.2.1 实时性优化)
- [5.2.2 资源占用优化](#5.2.2 资源占用优化)
- [第六章 实战案例:智能家居网关](#第六章 实战案例:智能家居网关)
-
- [6.1 硬件平台详解](#6.1 硬件平台详解)
- [6.2 软件架构与核心代码](#6.2 软件架构与核心代码)
-
- [6.2.1 MQTT 客户端代码(基于 Paho-MQTT 库)](#6.2.1 MQTT 客户端代码(基于 Paho-MQTT 库))
- [6.2.2 启动时间优化实战](#6.2.2 启动时间优化实战)
- [第七章 前沿演进方向](#第七章 前沿演进方向)
-
- [7.1 轻量化容器技术](#7.1 轻量化容器技术)
- [7.2 AI 边缘计算](#7.2 AI 边缘计算)
- [7.3 安全性增强](#7.3 安全性增强)
- 结论
第一章 嵌入式 Linux 基础概念
1.1 定义与核心特征
嵌入式 Linux是基于 Linux 内核,针对资源受限的专用设备(如智能家电、工业控制单元、汽车电子)定制的操作系统。与通用 Linux(如 PC 端 Ubuntu)相比,其核心差异体现在 "专用性" 与 "资源适配性" 上,具体特征如下:
- 资源约束适配:针对低配置硬件优化,支持最小系统(8MB RAM+16MB Flash)运行。例如,工业传感器常采用 ARM Cortex-M 系列芯片,需通过内核裁剪将内存占用压缩至 2MB 以内。
- 实时性扩展能力:标准 Linux 内核因进程调度延迟(约 100μs)无法满足工业控制需求,需通过 Xenomai(双内核架构)或 PREEMPT_RT(内核补丁)实现 μs 级响应。例如,汽车 ESC(电子稳定程序)要求制动信号响应时间 < 50μs,需基于 RT 补丁定制内核。
- 无头运行模式:多数嵌入式设备无需显示器 / 键盘,通过串口、SSH 或 Web 界面管理。例如,智能电表通过 RS485 接口与集中器通信,全程无本地交互界面。
- 交叉编译依赖:目标设备(如 ARM)算力不足,需在 x86 主机上通过交叉编译器(如 arm-linux-gnueabihf-gcc)生成可执行文件。
1.2 典型架构栈深度解析
嵌入式 Linux 架构呈分层设计,每层职责明确且可按需裁剪,具体架构如下(基于 ARM Cortex-A53 平台):
plaintext
| 应用层 | [Python/Java/C++ Apps] # 业务逻辑实现,如智能家居的设备控制算法
---------------------------------
| 中间件层 | [DBus, OpenCV, Qt] # 跨层通信与功能封装,DBus负责进程间消息传递
---------------------------------
| 系统服务层 | [systemd, NetworkManager]# 系统管理核心,systemd处理服务启动与依赖
---------------------------------
| 内核层 | [Linux Kernel 5.10+ RT Patch]# 硬件抽象与资源调度,RT补丁保障实时性
---------------------------------
| 硬件抽象层 | [Device Tree, HAL] # 设备树描述硬件拓扑,HAL隔离驱动与应用
---------------------------------
| 硬件层 | [ARM Cortex-A53, GPIO, I2C]# 物理硬件,含处理器、外设与通信接口- 应用层:以轻量化语言为主,例如 Python 通过 PySerial 库操作串口,C++ 通过 Qt 编写轻量化触控界面(适用于带屏设备如智能冰箱)。
- 中间件层:DBus 作为进程间通信(IPC)标准,在智能家居网关中用于协调 WiFi 模块与 Zigbee 模块的数据交互;OpenCV 则用于边缘设备的简单图像识别(如人脸识别门禁)。
- 系统服务层:systemd 替代传统 sysvinit,通过并行启动服务缩短开机时间(如嵌入式设备将启动流程从 30s 压缩至 5s);NetworkManager 动态管理 WiFi / 以太网连接,支持故障自动重连。
- 内核层:除进程 / 内存管理外,包含设备驱动框架(如 GPIO、SPI 子系统),通过 CONFIG_* 配置项裁剪功能(如移除 USB 驱动可节省 80KB 空间)。
- 硬件抽象层 :设备树(.dtb)替代传统板级代码,例如通过
gpio = <&gpio1 17 GPIO_ACTIVE_HIGH>;定义 GPIO 引脚功能,无需修改内核源码即可适配不同硬件。
第二章 Linux 文件系统深度剖析
2.1 FHS 标准与嵌入式适配
Filesystem Hierarchy Standard(FHS) 定义了 Linux 文件系统的目录结构,嵌入式系统基于 FHS 进行精简,典型结构如下(基于 BusyBox 构建的最小系统):
plaintext
/ # 根目录,挂载rootfs(只读,防止意外篡改)
├── bin/ # 核心命令集(BusyBox链接,ls/ps等命令均指向busybox)
├── dev/ # 设备文件(字符设备ttyS0、块设备mmcblk0p1)
├── etc/ # 配置文件(网络、服务启动参数)
│ ├── network/ # 网络配置(ifconfig-eth0脚本设置IP:192.168.1.10/24)
│ └── init.d/ # 启动脚本(S50sshd启动SSH服务)
├── lib/ # 动态库(libc.so、libm.so,glibc精简版或uClibc)
├── proc/ # 内核虚拟文件系统(动态反映进程/内存状态)
├── sbin/ # 系统管理命令(reboot、ifconfig,需root权限)
├── sys/ # sysfs虚拟文件系统(设备驱动控制接口)
├── tmp/ # 临时文件(ramfs挂载,断电丢失,避免磨损Flash)
└── usr/ # 用户程序(本地安装的工具,如Python脚本)
└── local/ # 自定义应用(如智能家居网关的mqtt_client)嵌入式文件系统类型选择:
- ext4:适用于 eMMC/SD 卡,支持日志功能(减少意外断电损坏),但占用空间较大(需预留 10% 空闲块)。
- jffs2:针对 NOR Flash 设计,支持擦除均衡(延长寿命),但挂载时间随容量增加而变长(不适用于 > 128MB 设备)。
- ubifs:替代 jffs2 的新一代 Flash 文件系统,支持动态压缩(节省空间)和快速挂载,广泛用于工业级 NOR/NAND Flash。
- ramfs/tmpfs :内存文件系统,
mount -t tmpfs tmpfs /tmp -o size=16M将 /tmp 挂载为 16MB 内存分区,适合临时文件存储。
2.2 关键目录功能与实战操作
2.2.1 /proc:内核实时信息接口
/proc 是内核提供的虚拟文件系统,所有文件均在内存中动态生成,无需占用磁盘空间,常用操作如下:
bash
# 1. 查看CPU架构与核心数
cat /proc/cpuinfo
# 输出示例(ARM Cortex-A53):
# Processor : ARMv7 Processor rev 1 (v7l)
# CPU cores : 4
# BogoMIPS : 1200.00
# 2. 监控内存使用(单位:KB)
cat /proc/meminfo | grep -E "MemTotal|MemFree|MemAvailable"
# 输出示例:
# MemTotal: 255848 kB
# MemFree: 89212 kB
# MemAvailable: 156380 kB
# 3. 查看进程状态(PID=1为init进程)
cat /proc/1/status
# 关键字段:
# Name: systemd(进程名)
# State: S (sleeping)(状态:休眠)
# VmSize: 12340 kB(虚拟内存占用)原理 :/proc 文件由内核模块procfs生成,用户空间通过read()系统调用触发内核函数proc_file_read(),动态生成文件内容,因此无需预先创建。
2.2.2 /sys:设备驱动控制接口
sysfs(/sys)是内核 2.6 后引入的虚拟文件系统,用于暴露设备驱动的属性(如 GPIO 方向、I2C 设备地址),通过文件读写实现设备控制,以 GPIO 为例:
bash
# 控制GPIO17输出高电平(适用于树莓派等支持sysfs GPIO的平台)
# 1. 导出GPIO17(从内核空间映射到用户空间)
echo 17 > /sys/class/gpio/export
# 2. 设置方向为输出(in/out)
echo out > /sys/class/gpio/gpio17/direction
# 3. 设置输出值(1=高电平,0=低电平)
echo 1 > /sys/class/gpio/gpio17/value
# 4. 使用完毕后取消导出(释放资源)
echo 17 > /sys/class/gpio/unexport注意事项:
- 并非所有 GPIO 都支持 sysfs 接口,需内核配置
CONFIG_GPIO_SYSFS=y。 - 高频率操作(如 1kHz 脉冲)不建议用 sysfs,因文件 IO 延迟较大,应改用内核驱动或 mmap 直接操作寄存器。
第三章 嵌入式 Linux 工作原理
3.1 启动流程全解析
嵌入式 Linux 启动流程可分为 4 个阶段:Bootloader→内核初始化→根文件系统挂载→用户态服务启动,时序如下:
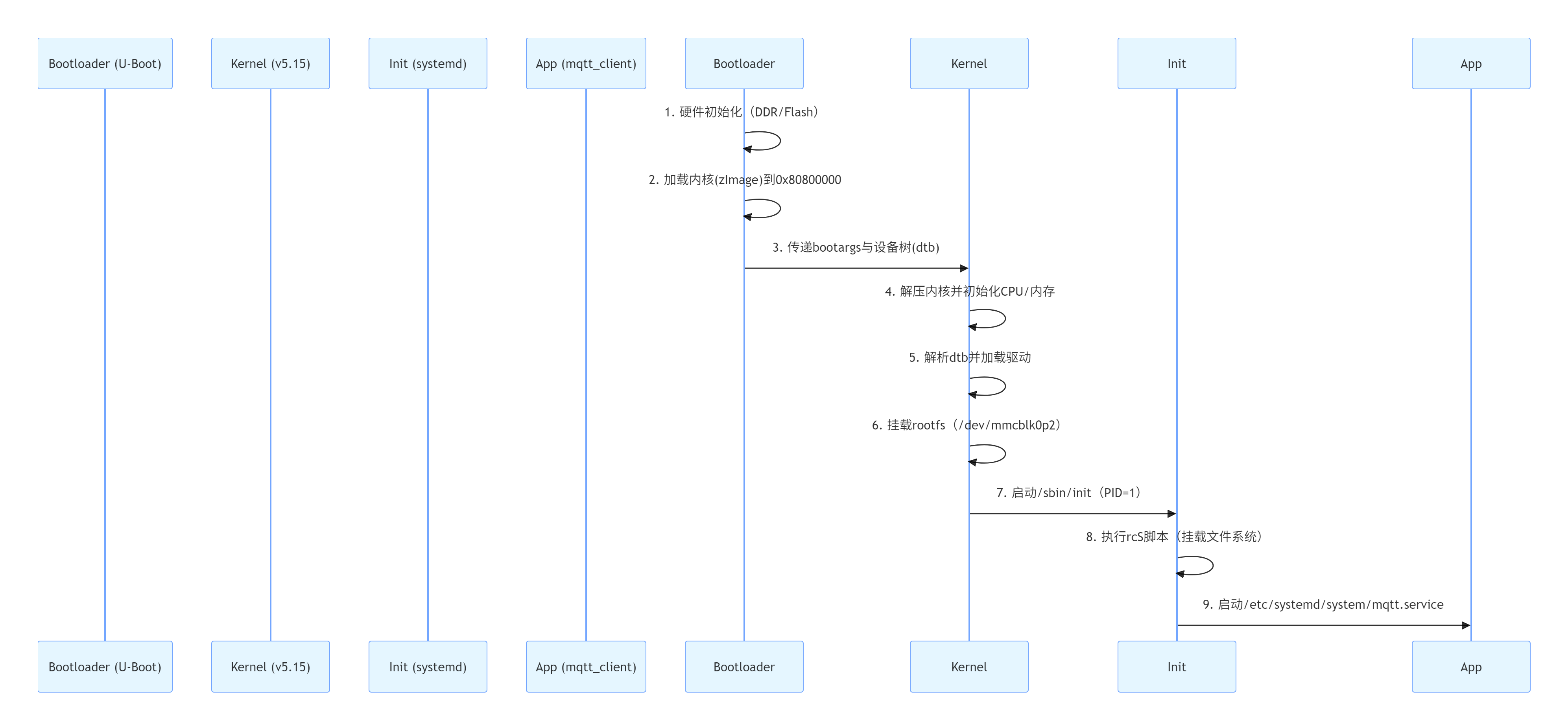
3.1.1 Bootloader 阶段(以 U-Boot 为例)
U-Boot 是嵌入式领域最常用的 Bootloader,支持多架构,核心功能包括硬件初始化、内核加载与环境变量管理。
关键操作代码:
bash
# 1. 查看U-Boot环境变量
printenv
# 输出示例:
# bootargs=console=ttyS0,115200 root=/dev/mmcblk0p2 rw rootfstype=ext4
# bootcmd=mmc dev 0; fatload mmc 0:1 0x80800000 zImage; fatload mmc 0:1 0x83000000 imx6ul.dtb; bootz 0x80800000 - 0x83000000
# 2. 修改启动参数(设置串口波特率与根文件系统)
setenv bootargs "console=ttyS0,115200 root=/dev/mmcblk0p2 rw"
# 3. 保存环境变量到Flash
saveenv
# 4. 手动启动内核(加载zImage与dtb)
fatload mmc 0:1 0x80800000 zImage # 从SD卡第1分区加载内核到内存0x80800000
fatload mmc 0:1 0x83000000 imx6ul.dtb # 加载设备树到0x83000000
bootz 0x80800000 - 0x83000000 # 启动内核(参数:内核地址、initramfs地址-省略、dtb地址)硬件初始化细节:
- 第一阶段(汇编):初始化时钟、关闭看门狗、配置 DDR 控制器(如设置时序参数)。
- 第二阶段(C 语言):初始化 Flash(NAND/NOR)、网口(用于 TFTP 下载内核)、USB(用于 U 盘启动)。
3.1.2 内核初始化阶段
内核启动流程从start_kernel()(init/main.c)开始,关键步骤如下:
- 架构初始化:设置页表、初始化中断控制器(如 GIC)、启用 MMU(内存管理单元)。
- 设备树解析 :内核通过
unflatten_device_tree()解析.dtb 文件,生成设备节点(如/soc/gpio@0209c000),驱动通过of_match_table匹配设备。 - 驱动加载:核心驱动(如 MMC、UART)优先加载,确保根文件系统可挂载;其他驱动(如 WiFi)后续通过 udev 动态加载。
- 根文件系统挂载 :根据 bootargs 中的
root=/dev/mmcblk0p2挂载根分区,初期以只读模式挂载(ro),启动后由 init 进程重新挂载为读写(rw)。
3.1.3 用户态启动阶段(systemd)
systemd 替代传统 sysvinit,通过单元文件(.service)管理服务,启动流程如下:
bash
# 1. 查看启动耗时
systemd-analyze
# 输出:Startup finished in 1.2s (kernel) + 800ms (userspace) = 2.0s
# 2. 查看服务依赖关系
systemctl list-dependencies mqtt.service
# 输出:mqtt.service依赖network.target(网络就绪后启动)
# 3. 关键单元文件示例(/etc/systemd/system/mqtt.service)
[Unit]
Description=MQTT Client Service
After=network.target # 网络就绪后启动
[Service]
ExecStart=/usr/local/bin/mqtt_client # 执行程序
Restart=always # 崩溃后自动重启
[Install]
WantedBy=multi-user.target # 多用户模式下启动3.2 设备驱动模型实战
Linux 设备驱动分为字符设备、块设备与网络设备,其中字符设备(如 GPIO、UART)最常用,以下为完整字符设备驱动示例:
3.2.1 字符设备驱动代码(mydrv.c)
c
#include <linux/module.h> // 模块相关函数(module_init/exit)
#include <linux/fs.h> // 文件操作结构体(file_operations)
#include <linux/cdev.h> // 字符设备结构体(cdev)
#include <linux/uaccess.h> // 用户空间交互(copy_to_user)
#define DEV_NAME "mydrv" // 设备名
#define DEV_MAJOR 250 // 主设备号(250为预留测试号)
#define BUF_SIZE 128 // 数据缓冲区大小
static char dev_buf[BUF_SIZE]; // 内核缓冲区
static struct cdev my_cdev; // 字符设备对象
// 打开设备(应用层调用open()时触发)
static int mydrv_open(struct inode *inode, struct file *filp) {
printk(KERN_INFO "mydrv: device opened (minor=%d)\n", iminor(inode));
return 0; // 0表示成功
}
// 读取设备(应用层调用read()时触发)
static ssize_t mydrv_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos) {
int ret;
// 限制读取长度(不超过缓冲区与剩余空间)
count = min(count, (size_t)(BUF_SIZE - *f_pos));
// 从内核缓冲区复制数据到用户空间(需用copy_to_user,不能直接赋值)
ret = copy_to_user(buf, dev_buf + *f_pos, count);
if (ret != 0) {
printk(KERN_ERR "mydrv: copy to user failed\n");
return -EFAULT; // 复制失败返回错误码
}
*f_pos += count; // 更新文件指针
return count; // 返回实际读取字节数
}
// 写入设备(应用层调用write()时触发)
static ssize_t mydrv_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) {
int ret;
// 限制写入长度
count = min(count, (size_t)(BUF_SIZE - *f_pos));
// 从用户空间复制数据到内核缓冲区
ret = copy_from_user(dev_buf + *f_pos, buf, count);
if (ret != 0) {
printk(KERN_ERR "mydrv: copy from user failed\n");
return -EFAULT;
}
*f_pos += count;
return count;
}
// 关闭设备(应用层调用close()时触发)
static int mydrv_release(struct inode *inode, struct file *filp) {
printk(KERN_INFO "mydrv: device closed\n");
return 0;
}
// 文件操作结构体(绑定驱动函数)
static struct file_operations fops = {
.owner = THIS_MODULE, // 驱动所属模块(防止模块被意外卸载)
.open = mydrv_open, // 打开设备
.read = mydrv_read, // 读取数据
.write = mydrv_write, // 写入数据
.release = mydrv_release // 关闭设备
};
// 驱动初始化函数(模块加载时调用)
static int __init mydrv_init(void) {
int ret;
dev_t dev_num; // 设备号(主设备号+次设备号)
// 1. 注册设备号(主设备号250,次设备号0~1)
dev_num = MKDEV(DEV_MAJOR, 0); // 组合设备号
ret = register_chrdev_region(dev_num, 1, DEV_NAME); // 静态注册
if (ret < 0) {
printk(KERN_ERR "mydrv: register_chrdev_region failed\n");
return ret;
}
// 2. 初始化字符设备
cdev_init(&my_cdev, &fops); // 绑定文件操作
my_cdev.owner = THIS_MODULE;
// 3. 添加字符设备到系统
ret = cdev_add(&my_cdev, dev_num, 1);
if (ret < 0) {
printk(KERN_ERR "mydrv: cdev_add failed\n");
unregister_chrdev_region(dev_num, 1); // 失败时释放设备号
return ret;
}
printk(KERN_INFO "mydrv: driver initialized\n");
return 0;
}
// 驱动退出函数(模块卸载时调用)
static void __exit mydrv_exit(void) {
dev_t dev_num = MKDEV(DEV_MAJOR, 0);
cdev_del(&my_cdev); // 移除字符设备
unregister_chrdev_region(dev_num, 1); // 释放设备号
printk(KERN_INFO "mydrv: driver exited\n");
}
// 模块入口/出口宏
module_init(mydrv_init);
module_exit(mydrv_exit);
// 模块信息(可选)
MODULE_LICENSE("GPL"); // 遵循GPL协议(必须声明,否则内核报警)
MODULE_AUTHOR("Embedded Linux Developer");
MODULE_DESCRIPTION("A simple character device driver");3.2.2 驱动编译与测试
Makefile:
makefile
obj-m += mydrv.o # 编译为模块
KERNELDIR ?= /home/dev/linux-5.15 # 内核源码路径
PWD := $(shell pwd)
all:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules # 调用内核Makefile编译
clean:
$(MAKE) -C $(KERNELDIR) M=$(PWD) clean编译与加载:
bash
# 交叉编译(针对ARM平台)
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-
# 目标板加载模块
insmod mydrv.ko
# 创建设备节点(用户空间访问入口)
mknod /dev/mydrv c 250 0 # c=字符设备,250=主设备号,0=次设备号
# 测试读写
echo "hello driver" > /dev/mydrv # 写入数据
cat /dev/mydrv # 读取数据(输出:hello driver)
# 卸载模块
rmmod mydrv第四章 开发工具链实战
4.1 交叉编译环境搭建
嵌入式开发需在 x86 主机上为目标架构(如 ARM)编译程序,常用工具链包括 Linaro、Buildroot 与 Yocto,以下为 Yocto 项目实战(构建最小系统镜像)。
4.1.1 Yocto 项目核心概念
- Poky:Yocto 的参考发行版,包含构建系统(BitBake)与基础元数据(meta 层)。
- 元层(Meta Layers) :组织配方(.bb 文件)的目录,如
meta-qt5提供 Qt5 支持,meta-raspberrypi支持树莓派。 - 配方(Recipe) :.bb 文件定义软件包的编译方式(如依赖、编译参数),例如
busybox_1.34.1.bb描述 BusyBox 的构建流程。
4.1.2 Yocto 构建步骤
bash
# 1. 安装依赖(Ubuntu 20.04)
sudo apt update
sudo apt install gawk wget git diffstat unzip texinfo gcc build-essential \
chrpath socat cpio python3 python3-pip python3-pexpect xz-utils debianutils \
iputils-ping python3-git python3-jinja2 libegl1-mesa libsdl1.2-dev pylint3
# 2. 获取Poky源码(thud分支,对应Yocto 2.6)
git clone -b thud git://git.yoctoproject.org/poky
cd poky
# 3. 初始化构建环境(生成build目录)
source oe-init-build-env # 执行后自动进入build目录
# 4. 配置目标架构(修改build/conf/local.conf)
echo 'MACHINE = "qemuarm"' >> conf/local.conf # 目标为ARM架构的QEMU模拟器
echo 'BB_NUMBER_THREADS = "4"' >> conf/local.conf # 4线程编译
echo 'PARALLEL_MAKE = "-j 4"' >> conf/local.conf
# 5. 构建最小系统镜像(core-image-minimal)
bitbake core-image-minimal # 首次构建约2~4小时(依赖网络与CPU性能)
# 6. 输出镜像位置
ls tmp/deploy/images/qemuarm/core-image-minimal-qemuarm.ext4 # 根文件系统镜像4.1.3 自定义应用集成
通过 Yocto 添加自定义程序(如 mqtt_client):
- 创建元层:
bash
# 在poky目录下创建自定义层meta-myapp
bitbake-layers create-layer meta-myapp
cd meta-myapp/recipes-myapp/mqtt_client- 编写配方文件(mqtt_client_0.1.bb):
bb
SUMMARY = "MQTT client for smart home gateway"
LICENSE = "GPLv2"
LIC_FILES_CHKSUM = "file://COPYING;md5=801f80980d171dd61dfe4b1eadd8e4b"
SRC_URI = "file://mqtt_client.c \
file://Makefile" # 源码文件路径
S = "${WORKDIR}" # 源码目录
do_compile() {
oe_runmake # 执行Makefile编译
}
do_install() {
install -d ${D}${bindir} # 创建安装目录
install -m 0755 mqtt_client ${D}${bindir} # 安装程序到/usr/bin
}
# 依赖库(MQTT库)
DEPENDS = "paho-mqtt-c"
RDEPENDS_${PN} = "paho-mqtt-c" # 运行时依赖- 添加层并构建:
bash
# 在build目录添加自定义层
bitbake-layers add-layer ../../meta-myapp
# 构建包含自定义应用的镜像
bitbake core-image-minimal # 镜像将包含/usr/bin/mqtt_client4.2 调试技术详解
嵌入式调试需解决 "目标设备资源有限" 与 "无法直接运行 IDE" 的问题,常用技术包括远程 GDB、JTAG 与内核调试。
4.2.1 GDB+gdbserver 远程调试
适用于用户态程序调试,步骤如下:
- 目标板启动 gdbserver:
bash
# 目标板运行gdbserver,监听9090端口,调试/usr/bin/mqtt_client
gdbserver :9090 /usr/bin/mqtt_client
# 输出:Process /usr/bin/mqtt_client created; pid = 1234
# Listening on port 9090- 主机端配置 GDB:
bash
# 主机使用交叉编译工具链的GDB(arm-linux-gnueabihf-gdb)
arm-linux-gnueabihf-gdb /home/dev/poky/build/tmp/work/qemuarm-poky-linux-gnueabi/mqtt_client/0.1-r0/image/usr/bin/mqtt_client
# GDB交互:连接目标板
(gdb) target remote 192.168.1.10:9090 # 目标板IP:端口
# 输出:Remote debugging using 192.168.1.10:9090
# 设置断点(在main函数入口)
(gdb) break main
# 输出:Breakpoint 1 at 0x8050: file mqtt_client.c, line 45.
# 运行程序
(gdb) continue
# 程序将在main函数断点处暂停
# 查看变量(如查看配置的MQTT服务器地址)
(gdb) print mqtt_server
# 输出:$1 = "mqtt://192.168.1.100:1883"
# 单步执行
(gdb) step # 进入函数
(gdb) next # 跳过函数4.2.2 内核调试技术
-
printk 调试 :在驱动中添加
printk(KERN_DEBUG "gpio value: %d\n", val);,通过dmesg查看输出(需内核配置CONFIG_DEBUG_KERNEL=y)。 -
KGDB 调试
:通过串口或网络连接内核 GDB,步骤如下:
- 内核配置:
CONFIG_KGDB=y、CONFIG_KGDB_SERIAL_CONSOLE=y。 - 启动参数添加:
kgdboc=ttyS0,115200 kgdbwait(串口 ttyS0,等待 GDB 连接)。 - 主机连接:
arm-linux-gnueabihf-gdb vmlinux,执行target remote /dev/ttyUSB0(通过 USB 转串口连接)。
- 内核配置:
第五章 嵌入式 Linux 优势与挑战
5.1 核心优势解析
| 优势 | 技术细节与案例 |
|---|---|
| 开源生态 | 6000 + 开源包通过 Buildroot/Yocto 集成,如: - OpenWRT:基于 Linux 的路由器系统,支持 100 + 无线芯片 - ROS(机器人操作系统):依赖 Linux 实时内核实现电机控制 |
| 网络协议栈 | 完整支持 TCP/IPv4/IPv6、WiFi(802.11a/b/g/n)、蓝牙(BlueZ)、LoRaWAN(通过 LoRa-SX1301 驱动),例如工业网关通过多协议栈实现设备互联 |
| 安全性 | - SELinux:通过 TE(类型 enforcement)限制进程权限,如禁止非 root 进程访问 GPIO - dm-verity:校验 rootfs 完整性,防止固件篡改 - 内核漏洞修复:LTS 内核(如 5.15)提供 5 年安全更新 |
| 硬件兼容性 | 支持 40 + 架构(ARM/x86/RISC-V),例如: - ARM:从 Cortex-M(微控制器)到 Cortex-A78(高性能) - RISC-V:Linux 5.17 + 官方支持,适用于低功耗 IoT 设备 |
5.2 典型挑战与解决方案
5.2.1 实时性优化
标准 Linux 内核因进程调度、中断关闭等导致延迟(约 100~500μs),无法满足工业控制(<100μs)、汽车电子(<50μs)需求,解决方案如下:
-
PREEMPT_RT 补丁:通过重构内核锁机制(将自旋锁改为可抢占 mutex)降低延迟,配置步骤:
bash# 1. 下载对应内核版本的RT补丁(如5.15.71-rt55) wget https://mirrors.edge.kernel.org/pub/linux/kernel/projects/rt/5.15/patch-5.15.71-rt55.patch.xz # 2. 应用补丁 xz -d patch-5.15.71-rt55.patch.xz patch -p1 < patch-5.15.71-rt55.patch # 3. 配置实时选项 make menuconfig # 选择:Kernel Features → Preemption Model → Fully Preemptible Kernel (RT) # 保存配置并编译内核 -
调度策略优化 :为实时任务设置
SCHED_FIFO调度策略,抢占普通任务:c#include <sched.h> struct sched_param param; param.sched_priority = 90; // 优先级(1~99,数值越大优先级越高) // 将当前进程设置为FIFO调度 if (sched_setscheduler(0, SCHED_FIFO, ¶m) == -1) { perror("sched_setscheduler failed"); }
5.2.2 资源占用优化
嵌入式设备内存 / 存储有限(如 8MB RAM+32MB Flash),需通过以下手段压缩系统体积:
-
内核裁剪:
bashmake nconfig # 图形化配置工具 # 关闭未用功能: # - 移除USB/PCI支持(CONFIG_USB=n) # - 禁用不必要的文件系统(CONFIG_EXT4=n,保留CONFIG_UBIFS=y) # - 关闭调试选项(CONFIG_DEBUG_INFO=n) # 裁剪后内核体积可从5MB降至1MB以下 -
用户态精简:
- 用 BusyBox 替代 GNU Coreutils:通过
make menuconfig选择所需命令(如 ls、cat),生成单一可执行文件(约 500KB)。 - 采用 uClibc/glibc 精简版:uClibc 内存占用仅为 glibc 的 1/3,适合无浮点运算的场景。
- 用 BusyBox 替代 GNU Coreutils:通过
-
应用程序优化:
- 静态链接:
arm-linux-gnueabihf-gcc -static app.c -o app(避免依赖动态库,但体积增加)。 - 代码压缩:使用 UPX 压缩可执行文件(
upx --best app,压缩率约 50%)。
- 静态链接:
第六章 实战案例:智能家居网关
6.1 硬件平台详解
核心配置:
- SoC:NXP i.MX6UL(ARM Cortex-A7,800MHz,支持单 / 双核)
- 优势:低功耗(典型功耗 0.5W)、集成外设丰富(2x UART、2x I2C、1x SPI)。
- 内存:256MB DDR3L(低电压版,1.35V)
- 存储:4GB eMMC(MLC 类型,擦写次数 10000+)
- 通信模块:
- WiFi:RTL8188EU(支持 802.11n,2.4GHz)
- Zigbee:CC2530(通过 UART 与主芯片通信,协议栈 Z-Stack 3.0)
6.2 软件架构与核心代码
网关功能:通过 Zigbee 收集传感器数据(温度、湿度),经 WiFi 转发至云端 MQTT 服务器;接收云端指令控制家电(如开关灯)。
6.2.1 MQTT 客户端代码(基于 Paho-MQTT 库)
c
#include <stdio.h>
#include <string.h>
#include <paho_mqtt_c.h>
#include <gpio.h> // 自定义GPIO操作库
#define MQTT_SERVER "mqtt://192.168.1.100:1883" // 云端MQTT服务器
#define COOLER_PIN 17 // 散热器控制GPIO引脚
#define SENSOR_TOPIC "/sensors/temp" // 温度数据上报主题
#define CMD_TOPIC "/cmd/cooler" // 散热器控制指令主题
// GPIO初始化(设置散热器引脚为输出)
void gpio_init() {
gpio_export(COOLER_PIN);
gpio_set_direction(COOLER_PIN, GPIO_DIR_OUT);
gpio_set_value(COOLER_PIN, 0); // 初始关闭
}
// MQTT消息回调函数(接收云端指令)
void mqtt_callback(PMQTTClient client, MQTTMessage *msg, void *userdata) {
printf("Received topic: %s, payload: %.*s\n",
msg->topicName, msg->payloadLen, (char*)msg->payload);
// 处理散热器控制指令
if (strcmp(msg->topicName, CMD_TOPIC) == 0) {
if (strncmp((char*)msg->payload, "on", 2) == 0) {
gpio_set_value(COOLER_PIN, 1);
printf("Cooler turned on\n");
} else if (strncmp((char*)msg->payload, "off", 3) == 0) {
gpio_set_value(COOLER_PIN, 0);
printf("Cooler turned off\n");
}
}
}
// 上报温度数据到云端
void report_temperature(PMQTTClient client, float temp) {
char payload[32];
snprintf(payload, sizeof(payload), "%.1f", temp); // 格式化温度数据(如"25.5")
MQTTMessage msg = {
.qos = 1, // 服务质量等级(1=至少一次送达)
.retained = 0, // 不保留消息
.payload = payload,
.payloadLen = strlen(payload)
};
MQTTClient_publish(client, SENSOR_TOPIC, &msg);
printf("Reported temperature: %s\n", payload);
}
int main() {
PMQTTClient client;
MQTTClient_connectOptions conn_opts = MQTTClient_connectOptions_initializer;
int rc;
// 初始化GPIO
gpio_init();
// 创建MQTT客户端
client = MQTTClient_create("gateway_client", MQTT_SERVER, 60, NULL, NULL, NULL);
if (!client) {
fprintf(stderr, "Failed to create MQTT client\n");
return -1;
}
// 设置消息回调
MQTTClient_setCallbacks(client, NULL, NULL, mqtt_callback, NULL);
// 配置连接参数
conn_opts.keepAliveInterval = 60; // 心跳间隔60s
conn_opts.cleansession = 1; // 清理会话
// 连接MQTT服务器
if ((rc = MQTTClient_connect(client, &conn_opts)) != MQTTCLIENT_SUCCESS) {
fprintf(stderr, "Failed to connect, return code %d\n", rc);
return -1;
}
// 订阅控制指令主题
MQTTClient_subscribe(client, CMD_TOPIC, 1); // QoS=1
// 模拟温度上报(实际应从Zigbee模块读取)
float temp = 25.0;
while (1) {
report_temperature(client, temp);
temp += 0.5; // 模拟温度上升
if (temp > 35.0) temp = 25.0;
sleep(5); // 每5秒上报一次
}
// 清理资源(实际不会执行,因while(1)循环)
MQTTClient_disconnect(client, 1000);
MQTTClient_destroy(&client);
return 0;
}6.2.2 启动时间优化实战
目标:将网关启动时间从 10s 压缩至 2s,步骤如下:
-
内核优化:
- 启用
CONFIG_INITRAMFS:将必要驱动打包进 initramfs,减少启动时模块加载时间。 - 关闭未用外设驱动:如 USB、HDMI(节省约 1.5s)。
- 启用
-
用户态优化:
- systemd 服务并行启动:修改
.service文件,设置DefaultDependencies=no减少依赖。 - 简化初始化脚本:移除
rcS中不必要的自检步骤(如磁盘检查,节省 2s)。
- systemd 服务并行启动:修改
-
优化结果:
bash# 生成启动时序图(需systemd-analyze工具) systemd-analyze plot > boot.svg # 时序分析: # 内核阶段:1.2s(从内核解压到rootfs挂载) # 用户态阶段:800ms(从systemd启动到mqtt服务就绪) # 总启动时间:2.0s
第七章 前沿演进方向
7.1 轻量化容器技术
传统 Docker 因体积大(基础镜像≥100MB)不适用于嵌入式,轻量化方案如下:
-
balenaEngine:Docker 兼容的嵌入式容器引擎,支持 ARM 架构,镜像体积减少 60%:
bash# 在i.MX6UL上运行Alpine容器 balena run -it --rm --memory=32m alpine sh # 限制内存32MB -
容器化应用优势:
- 隔离性:避免不同应用库冲突(如 Python 2 与 Python 3)。
- 升级便捷:通过
balena push远程更新容器,无需整机刷机。
7.2 AI 边缘计算
嵌入式 Linux 成为 AI 边缘推理的核心平台,通过 TensorFlow Lite 实现轻量化模型部署:
python
import tensorflow as tf
import numpy as np
# 加载量化后的模型(MobileNetV2,约10MB)
interpreter = tf.lite.Interpreter(model_path="mobilenet_v2_quant.tflite")
interpreter.allocate_tensors() # 分配张量内存(约50MB)
# 获取输入/输出张量
input_details = interpreter.get_input_details()
output_details = interpreter.get_output_details()
# 准备输入数据(320x320 RGB图像,量化为uint8)
input_data = np.random.randint(0, 255, size=(1, 320, 320, 3), dtype=np.uint8)
interpreter.set_tensor(input_details[0]['index'], input_data)
# 执行推理(在i.MX6UL上约500ms/帧)
interpreter.invoke()
# 获取输出(图像分类结果)
output_data = interpreter.get_tensor(output_details[0]['index'])
print("Predicted class:", np.argmax(output_data))优化手段:
- 模型量化:将 32 位浮点模型转为 8 位整数,体积减少 75%,速度提升 3 倍。
- 硬件加速:通过 OpenCL 调用 GPU(如 NPU),推理延迟降至 100ms 内。
7.3 安全性增强
嵌入式设备因物理暴露易被攻击,需从硬件到软件多层防护:
-
dm-verity:通过哈希树校验 rootfs,防止固件篡改:
bash# 生成rootfs哈希值 veritysetup format /dev/mmcblk0p2 /dev/mmcblk0p3 # p2=rootfs, p3=哈希分区 # 启动参数添加:root=/dev/mmcblk0p2 verity=1 ro -
TPM 2.0 集成:硬件级密钥存储,用于加密敏感数据(如 WiFi 密码):
c#include <tss2/tss2_esys.h> // 初始化TPM上下文 ESYS_CONTEXT *ctx; Esys_Initialize(&ctx, NULL, NULL); // 生成随机密钥(存储于TPM芯片,无法导出) TPM2B_PUBLIC public; TPM2B_PRIVATE private; Esys_CreatePrimary(ctx, ESYS_TR_NONE, ESYS_TR_NONE, ESYS_TR_NONE, NULL, &in_public, NULL, NULL, &private, &public, NULL, NULL);
结论
嵌入式 Linux 凭借可裁剪性 (最小系统 < 2MB)、硬件兼容性 (支持 ARM/RISC-V 等架构)及开源生态(6000 + 工具包),已成为智能设备的事实标准。随着 RISC-V 架构普及(2023 年占新设计 23%)与 AIoT 融合加速,其在边缘计算领域的主导地位将进一步巩固。
开发者需关注三大方向:
- 实时性优化:基于 PREEMPT_RT 构建低延迟内核,满足工业控制需求。
- 资源效率:通过容器化与轻量化技术,在 8MB RAM 设备上运行复杂应用。
- 安全性:集成 TPM 2.0 与 dm-verity,抵御物理与网络攻击。
参考文献与引用出处
- Linux 内核文档:https://www.kernel.org/doc/html/latest/(内核启动流程、设备树规范)
- Yocto Project 官方手册:https://docs.yoctoproject.org/(元层设计、配方编写)
- Embedded Linux Conference 2023 报告:https://elinux.org/ELC_2023(嵌入式 Linux 市场数据、RISC-V 支持现状)
- U-Boot 用户手册:https://www.denx.de/wiki/U-Boot(Bootloader 配置与命令集)
- TensorFlow Lite 官方文档:https://www.tensorflow.org/lite(边缘推理模型优化)
- PREEMPT_RT 补丁说明:https://rt.wiki.kernel.org/(实时内核配置与测试)