1. 非对称圆形标定板
标定板生成器:calib.io
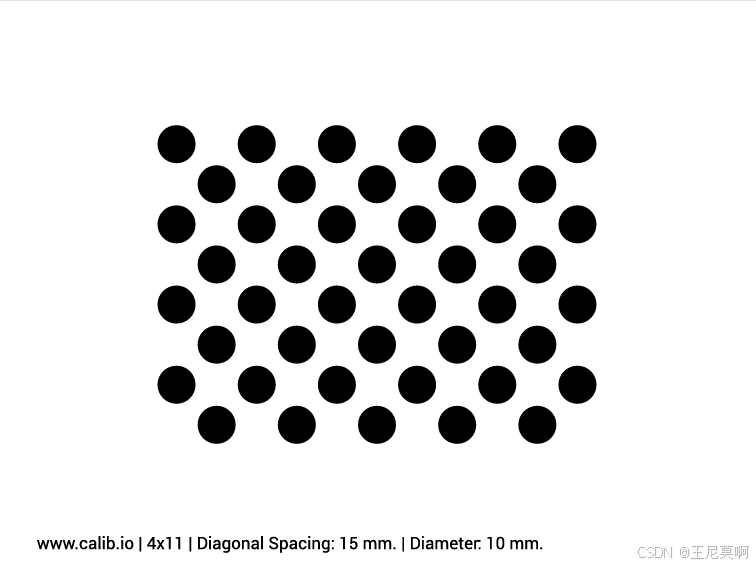
如上所示row = 实际行数/2 ,col = 实际列数
2. 代码
完整代码
python
"""
Stereo calibration (asymmetric circles grid)
"""
import glob, os, cv2
import numpy as np
from tqdm import tqdm
# ---------- 参数 ----------
LEFT_DIR = r'D:\Document\Camera1'
RIGHT_DIR = r'D:\Document\Camera2'
ROWS = 4 # 圆点行数(短边)
COLS = 11 # 圆点列数(长边)
SQUARE = 15.0 # 圆心间距,单位 mm
# ---------- 1. 生成物理坐标 ----------
def generate_board_points(rows, cols, dist, type_flag=1):
"""生成非对称圆点标定板 3D 坐标"""
pts = []
if type_flag == 1:
offset_x, offset_y = dist / 2.0, dist / 2.0
i = k = 0
for row in range(cols):
if row != 0:
if row % 2 == 0:
k += 1
else:
i += 1
for col in range(rows):
x = col * dist
y = (row - (k if row % 2 == 0 else i)) * dist
if row % 2 != 0:
x += offset_x
y += offset_y
pts.append((x, y, 0.0))
return np.array(pts, dtype=np.float32)
# ---------- 2. 查找圆点 ----------
def find_circles(images, pattern_size):
"""返回 (ok, corners) 列表"""
blob_params = cv2.SimpleBlobDetector.Params()
blob_params.filterByArea = False
blob_params.minArea = 20
blob_params.maxArea = 1024
blob_params.filterByCircularity = True
blob_params.minCircularity = 0.7
blob_params.filterByConvexity = True
blob_params.minConvexity = 0.8
blob_params.filterByInertia = True
blob_params.minInertiaRatio = 0.5
detector = cv2.SimpleBlobDetector.create(blob_params)
flags = cv2.CALIB_CB_ASYMMETRIC_GRID + cv2.CALIB_CB_CLUSTERING
all_corners, ok_idx = [], []
for im_path in tqdm(images, desc='Detect circles'):
img = cv2.imread(im_path, cv2.IMREAD_GRAYSCALE)
if img is None: # 读图失败
continue
ok, corners = cv2.findCirclesGrid(img, pattern_size, flags=flags,
blobDetector=detector)
ok_idx.append(ok)
if ok:
corners = cv2.cornerSubPix(img, corners, (5, 5), (-1, -1),
criteria=(cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 10, 0.1))
all_corners.append(corners)
return all_corners, ok_idx
# ---------- 3. 主流程 ----------
def stereo_calibrate_main():
left_imgs = sorted(glob.glob(os.path.join(LEFT_DIR, '*.*')))
right_imgs = sorted(glob.glob(os.path.join(RIGHT_DIR, '*.*')))
assert len(left_imgs) == len(right_imgs), '左右图像数量必须一致'
# 3.1 准备 3D 点
pattern_size = (ROWS, COLS)
objp = generate_board_points(ROWS, COLS, SQUARE)
objpoints = [objp] * len(left_imgs) # 每幅图对应同一组 3D 点
# 3.2 检测圆点
left_corners, ok_L = find_circles(left_imgs, pattern_size)
right_corners, ok_R = find_circles(right_imgs, pattern_size)
ok = np.array(ok_L) & np.array(ok_R) # 只保留左右都检测成功的
# 取最小数量,保证左右一一对应
n_pairs = min(len(left_corners), len(right_corners))
left_corners = left_corners[:n_pairs]
right_corners = right_corners[:n_pairs]
objpoints = [objp] * n_pairs
print(f'有效图像对:{n_pairs}')
if len(objpoints) < 3:
raise RuntimeError('有效图像对不足,无法标定')
# 3.3 单目标定
img_size = cv2.imread(left_imgs[0], cv2.IMREAD_GRAYSCALE).shape[::-1]
retL, K1, D1, rvecsL, tvecsL = cv2.calibrateCamera(
objpoints, left_corners, img_size, None, None)
retR, K2, D2, rvecsR, tvecsR = cv2.calibrateCamera(
objpoints, right_corners, img_size, None, None)
# 3.4 双目标定
flags = (cv2.CALIB_FIX_INTRINSIC |
cv2.CALIB_USE_INTRINSIC_GUESS |
cv2.CALIB_RATIONAL_MODEL)
retS, K1, D1, K2, D2, R, T, E, F = cv2.stereoCalibrate(
objpoints, left_corners, right_corners,
K1, D1, K2, D2, img_size,
flags=flags,
criteria=(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-6))
# ---------- 4. 保存结果 ----------
np.savez('stereo_calib.npz',
K1=K1, D1=D1, K2=K2, D2=D2,
R=R, T=T, E=E, F=F,
img_size=img_size)
# ---------- 5. 打印信息 ----------
print('\n========== 双目标定结果 ==========')
print(f'左重投影误差:{retL:.4f} 像素')
print(f'右重投影误差:{retR:.4f} 像素')
print(f'立体标定误差:{retS:.4f} 像素')
print('\n左相机内参 K1:\n', K1)
print('\n右相机内参 K2:\n', K2)
print('\n旋转向量 R:\n', R)
print('\n平移向量 T:\n', T)
if __name__ == '__main__':
stereo_calibrate_main()对称圆形标定板同理,替换cv2.findCirclesGrid 的参数flags=cv2.CALIB_CB_SYMMETRIC_GRID即可。
若是检测不到,可以在第一步添加下面代码观察圆形点是否被检出。
python
img = cv2.resize(img, (640, 480))
# 检测斑点
keypoints = detector.detect(img)
# 在图像上绘制检测到的斑点
image_with_keypoints = cv2.drawKeypoints(img, keypoints, None, color=(0, 255, 0),
flags=cv2.DrawMatchesFlags_DRAW_RICH_KEYPOINTS)
# 显示结果
cv2.imshow("Blob Detection", image_with_keypoints)
cv2.waitKey(0)