【导读】
无人机正在成为空中数据采集的重要工具,然而空中拍摄图像中的小目标检测,仍是一个棘手的问题。尤其在复杂背景、高空视角与资源受限的嵌入式环境中,传统检测算法往往"识"而不准、难以实时部署。针对这一难题,本文带你走进一项新研究成果:LUD-YOLO,一种专为无人机设计的轻量化目标检测框架,它在精度、速度与模型体积之间达成了令人惊艳的平衡。
无人机图像目标检测虽然在军事、电力、农业等领域有着广泛的应用前景,但想要让算法真正落地,并非易事。特别是在实际场景中,无人机采集到的图像往往存在遮挡、复杂背景、目标小等问题,这些都给算法提出了更高的要求。那么,究竟是什么让小目标检测变得如此棘手?接下来我们从问题本身出发,深入解析挑战所在。
为什么小目标检测如此困难?
无人机图像常常具备以下特征:
- 目标尺寸小,比如行人、三轮车等仅几十像素;
- 目标分布稀疏且不均衡;
- 环境复杂多变,如城市、农村、低光、遮挡等;
同时无人机搭载的嵌入式设备算力有限,难以运行大型深度模型。
因此,传统检测模型如YOLOv5、YOLOv7等,要么"体重超标",要么精度不足,难以满足无人机应用"轻+快+准"的三重要求。
核心技术详解:从结构到机制,全方位精简优化
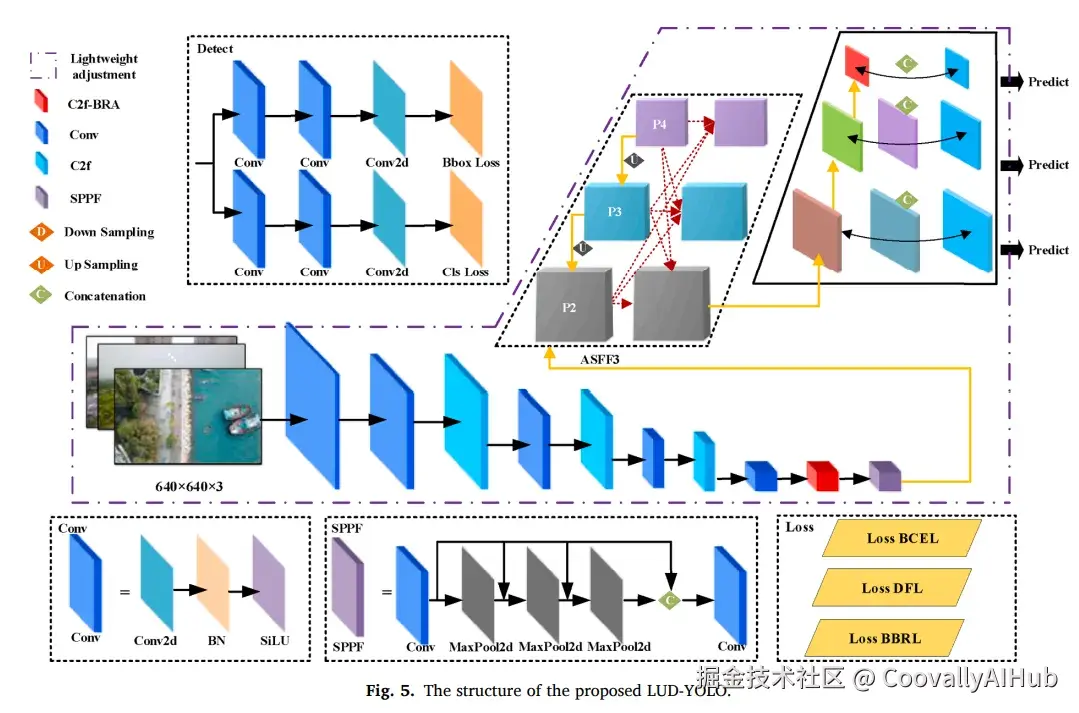
LUD-YOLO 不是简单做轻量化处理,而是在检测结构、特征提取、模型剪枝等多个层面上做了系统性重构。其核心由三大创新点构成:
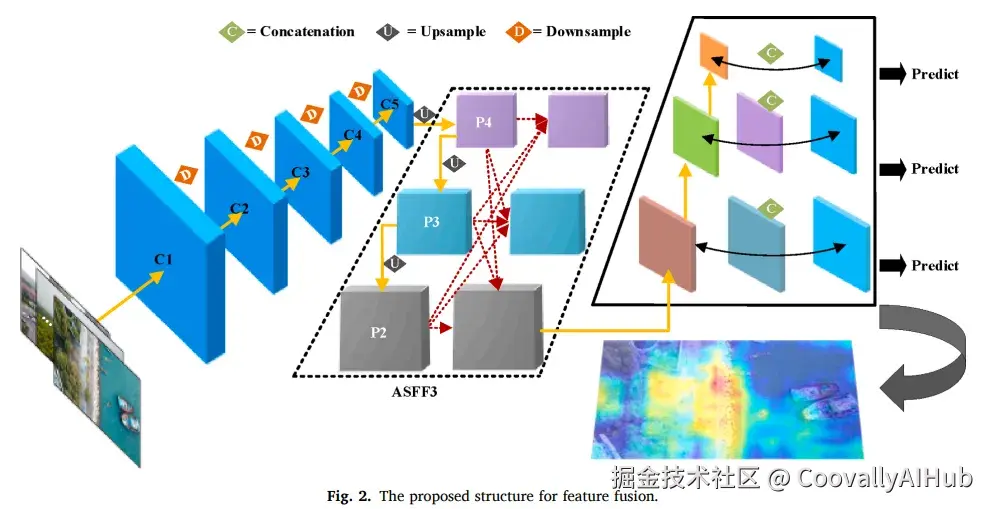
- 多尺度自适应融合:AFPN特征金字塔结构
关键词: 语义对齐、多级融合、小目标强化
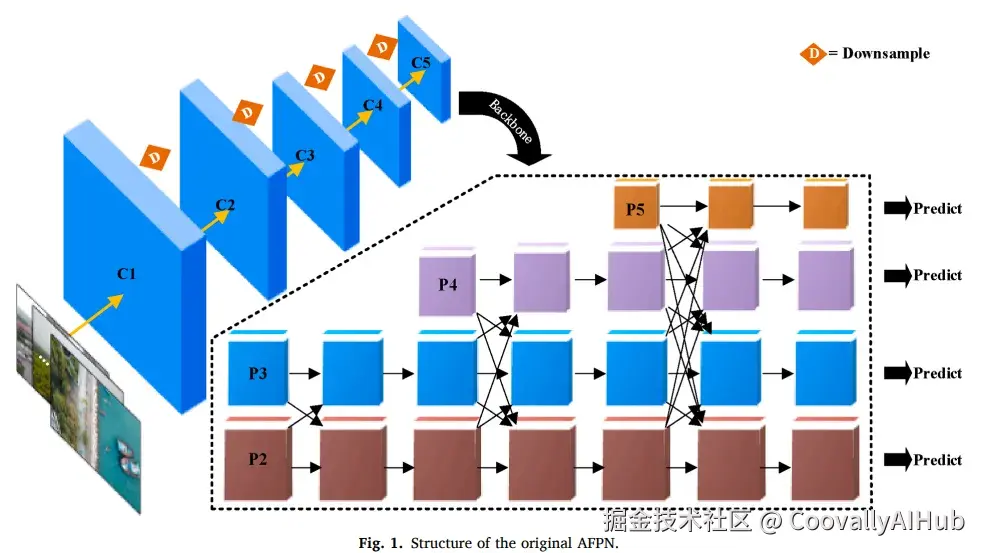
传统FPN和PAN结构在处理无人机图像时,容易出现高层语义信息在下采样传递中衰减,或低层细节在上采样中被稀释,尤其不利于小目标的检测。为此,LUD-YOLO引入了 Asymptotic Feature Pyramid Network(AFPN)结构:
- 自底向上逐层融合,避免非邻接特征直接拼接带来的"语义鸿沟";
- 自适应空间加权机制,动态融合 C2-C4 特征;
- 避免引入新的检测头,从而减少冗余参数。
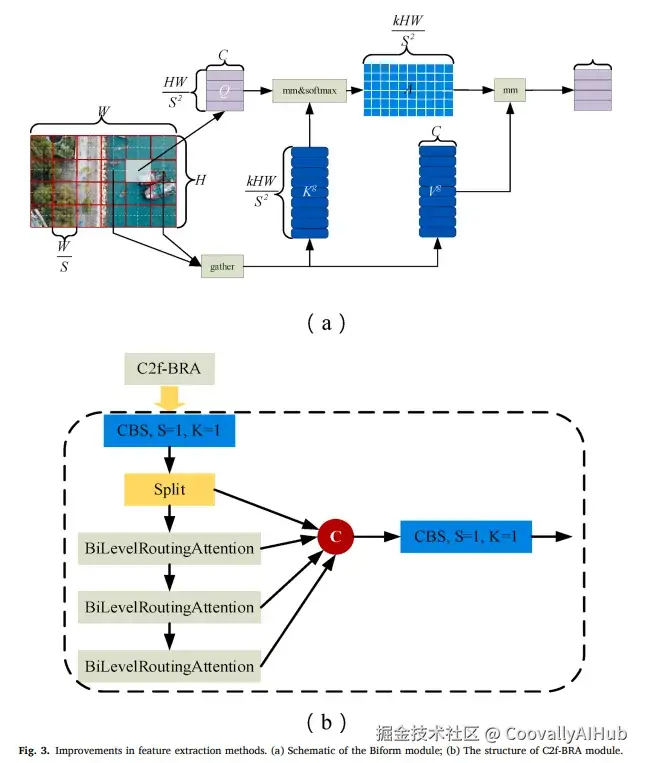
- 稀疏注意力增强提取:C2f-BRA模块
关键词: 全局感知、动态稀疏、计算资源优化
YOLOv8中主干采用C2f模块,但仍以卷积为主,感受野有限。LUD-YOLO提出改进版本C2f-BRA(BiLevel Routing Attention)模块:
- 在特征提取阶段引入 Biform 模块,对特征图区域划分并构建区域间稀疏图注意力机制;
- 保留最强 Top-K 区域连接,提高语义提取效率;
- 显著降低计算与显存负担,兼顾轻量化与全局依赖感知能力。
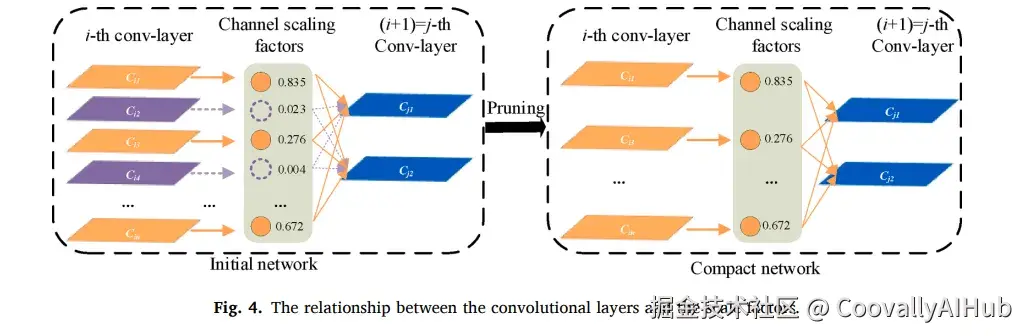
- 极致通道剪枝:Network Slimming轻量方案
关键词: 通道选择、正则化、兼容YOLO结构
为了让LUD-YOLO真正运行在无人机嵌入式芯片上,研究者采用了 Network Slimming 策略,具体步骤如下:
- 在BN层引入L1正则化;
- 排序通道权重,剪掉"低敏感"通道;
- 保留主干结构不变,通过再训练恢复性能;
- 该过程可多轮进行,最终取得小体积、高鲁棒性的模型。
实验表现:小而强,数据说话最有力
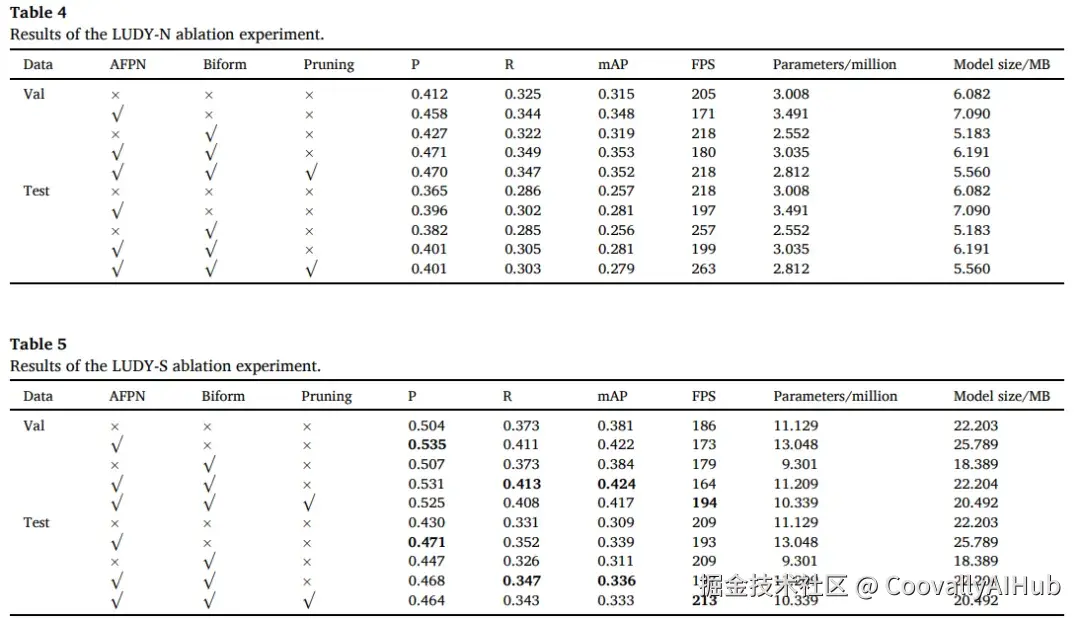
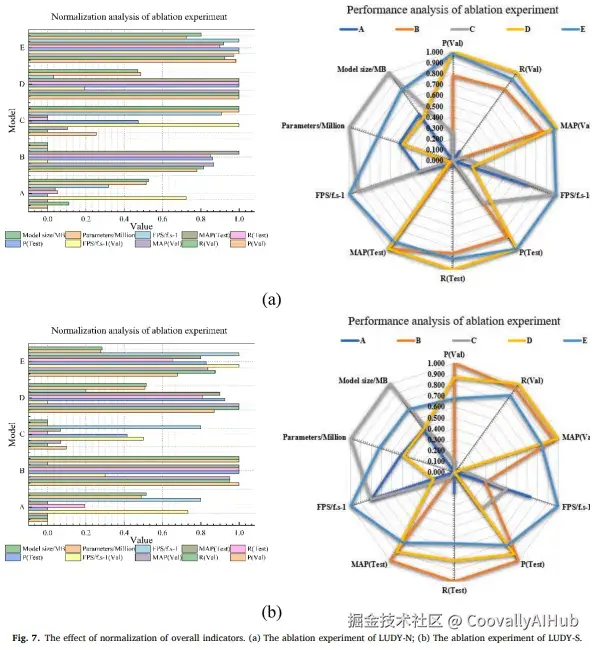
- Ablation消融实验:每一步改进都有明确收益
基于VisDrone2019数据集,研究者依次将AFPN、Biform模块和剪枝策略添加至YOLOv8-n/s中进行消融实验。结果表明:
- 单独引入AFPN后,mAP最高提升3.3% ,对小目标尤为有效;
- 结合C2f-BRA模块后,模型推理速度和精度同步提升;
- 加入剪枝后,参数量减少超7% ,mAP仅下降约0.2%,但FPS最高提升超20%。
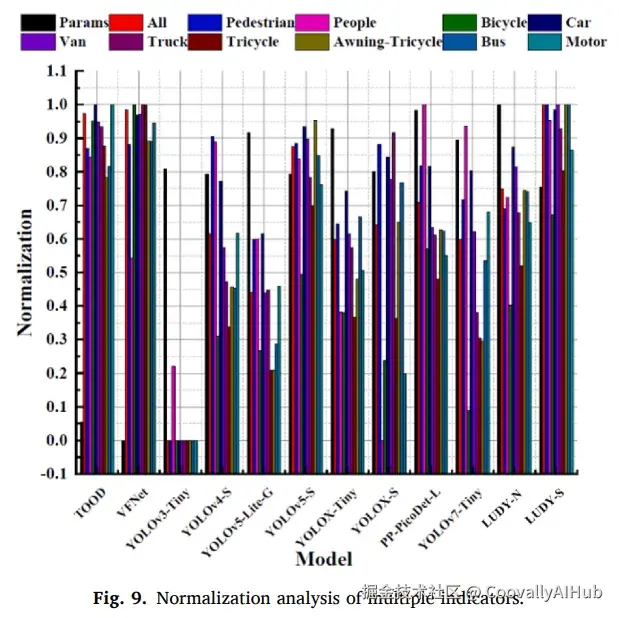
- 与主流算法全面对比:轻量不等于低能
在 VisDrone2019 上,LUD-YOLO 在多个类别上领先主流算法:
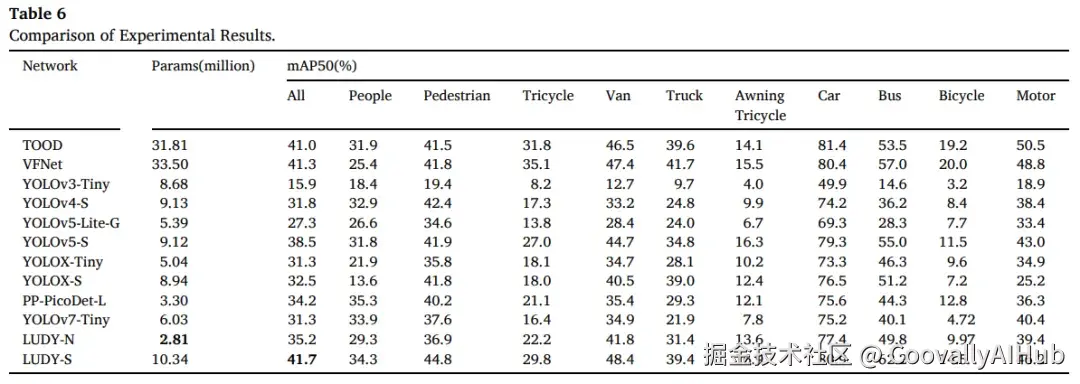
尤其在少样本类如"Awning Tricycle"中,LUD-YOLO的泛化能力表现出色,进一步验证其强鲁棒性。
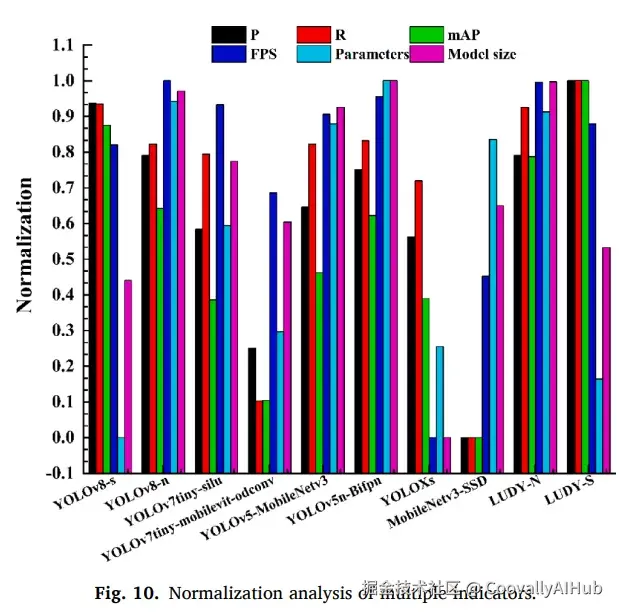
- 跨数据集验证:UAVDT上仍强势通吃
为了验证模型泛化能力,研究者在另一高难度数据集 UAVDT 上测试结果如下:
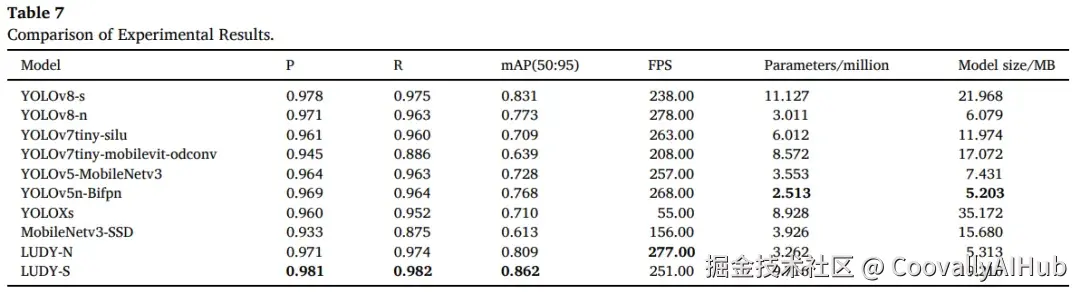
LUD-YOLO再次验证:不仅能跑得快,还能看得准,真正适配"低算力+复杂场景"的实际需求。
总结:从理论走向实用,LUD-YOLO向边缘部署再进一步
LUD-YOLO并非在已有YOLO基础上"微调",而是面向无人机小目标检测这一典型场景,进行架构级重构与轻量优化:
- 精度媲美主流重模型
- 推理速度达200+FPS
- 模型仅2~10MB,轻松部署到嵌入式设备
未来,研究团队计划将LUD-YOLO扩展至小样本/弱监督场景,以降低对标注数据的依赖,加速模型在农业巡检、安防布控等领域的落地应用。