自驾Camera相关技术点的一些讨论
1、前视Camera已经从三目发展到了双目,后续有没有单目的可能性?
既要兼顾大FOV,又要兼顾远距离,如果是单目,可以采用高像素CIS和非均匀镜头,但是同时带来了后续几个关键技术问题需要解决:非均匀镜头的光学设计、图像内外参数校准环境搭建、非均匀镜头方案成本能否低于双目、数据传输接口、ISP矫正处理、实际应用中的目标像素需求等。
2、后视Camera的技术规格如何,是否复用前视?
根据R79的法规,变道并道会对后视camera有一定的技术需求,既要兼顾FOV又要兼顾Range,所以FOV和Range无法和前视完全一致,CIS芯片可以和前视选择相同。
3、侧视和环视,是各自独立存在,还是彼此融合?
目前看,侧视和环视的技术要求不同,侧视长距离宽FOV,环视短距离更宽FOV,以当前技术条件,无法融合。后续可以视超级鱼眼和CIS技术发展,再考虑进行融合。但是采用高像素CIS和超级鱼眼,同时也带来了后续几个关键技术问题需要解决:超级鱼眼的光学设计、图像内外参数校准环境搭建、高像素CIS的成本能否低于原来传统方案的CIS、数据传输接口、ISP矫正处理、超级鱼眼实际应用中的目标像素需求等。
4、DMS Camera技术规划?
DMS Camera采用Gobal Shutter技术,行车Camera 采用Rolling Shutter技术,需要进行单独技术规划。
5、各Camera的Image Sensor的技术KPI需求怎么演进?
可以参考正文中Sony、Onsemi、Sumsung、OV在3MP、5MP、8MP、Higher MP(12/17/18)的CIS技术汇总表。同时也可以看到当前主流的CIS芯片主要是以上四家,车载Camera Tier1更多的是选用主流大厂的CIS芯片,搭配不同的镜头并调教。
6、18MP Image Sensor的在自驾Camera中的意义是什么?
可以提供远距离下目标的像素点数,有注意CV算法中的特征提取,但是同时也带来了数据传输的压力和ISP计算压力,以及后续可能会和超级鱼眼配合,产生新的技术方案。但是在当前阶段,不可能量产应用,因为Higher MP CIS需要和Serdes芯片、ISP芯片、GPU视觉感知算力同步演进升级。
7、自驾Camera 加串芯片如何演进?
Camera的加串芯片需要和域控端的解串芯片相互配合,这块Tier1没有太多话语权,主流选择方案还是ADI GMSL,后续如果OEM自研Camera或者主导Camera开发,可以同APHY芯片的选取结合,在Serdes上以及车载Camera上带来数据率提升以及成本降低(相当于OEM增加了一倍的Serdes芯片采购量,具有更好的议价权,另外APHY芯片的供应商选择更多,也带来了供应商竞争降本)。
8、自驾Camera 覆盖范围技术参数有哪些?
-
窄视场角摄像头(Narrow):30° FOV,探测距离约250米
-
广视场角摄像头(Wide):120° FOV,探测距离约60米
-
后置摄像头(Rear):FOV 60°,探测距离100m。
-
侧前和侧后摄像头:FOV 120°,探测距离50m。
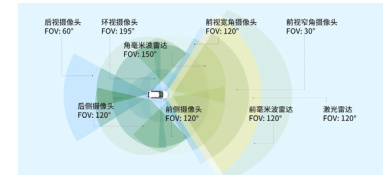 图1 FOV参考
图1 FOV参考
- 一般Camera的典型值如下
30° FOV:探测距离可达250米。
50° FOV:探测距离约为150米。
60° FOV:探测距离约为100米。
120° FOV:探测距离约为60米。
根据各家自驾方案,具体可以通过CIS芯片规格和镜头组合进行硬件保证,通过后端算法对探索目标所需的像素格式进行平衡。