【导读】
无人机"飞得高",但能不能"看得清",关键在于图像识别算法。YOLO、DETR、Transformer......眼花缭乱。不同算法各有千秋,不同行业也面临不同挑战。到底怎么选,选对了又怎么训练、部署?这篇文章告诉你答案。
无人机之眼,识图易,选算法难!
随着无人机在交通管理、城市治理、铁路巡检、精准农业等领域的加速普及,航拍图像正成为一种宝贵的新型数据资产。但想要从海量图像中挖掘价值,"看清楚"、"识得准",才是关键。
这时候,图像识别算法就成了无人机智能的核心引擎------从识别违章车辆、发现城市乱象,到定位病虫害或铁路隐患,好的算法能将高空视角真正转化为可落地的洞察。
但问题也随之而来:
- 算法太多,怎么选?
YOLO、Faster R-CNN、SSD、DETR、Swin Transformer......不同模型擅长不同方向,但选错了不仅识别不准,还可能拖慢系统。
- 场景太复杂,难以通吃?
农田、城市、铁轨、车流,每个行业对算法的需求都截然不同:你要速度?精度?还是能识别极小目标?
- 试错成本高,效率低?
找代码、准备数据、配置环境、训练调参......光选型就能耗掉你几周。
一句话总结:选错算法 = 资源浪费 + 业务延误
那么,面对纷繁复杂的算法库,你该怎么选择最适合自己业务场景的那一款?
别急,下面我们来拆解答案。
分场景拆解:你的行业需要什么算法?
不同场景对算法的要求不同,以下结合最新研究与实战案例,给出针对性方案
- 交通领域:空中交警如何高效识别车流与违章?
典型应用场景:
- 识别高速公路上违规停车的车辆
- 统计城市早高峰车流密度
- 实时检测事故现场位置与影响范围
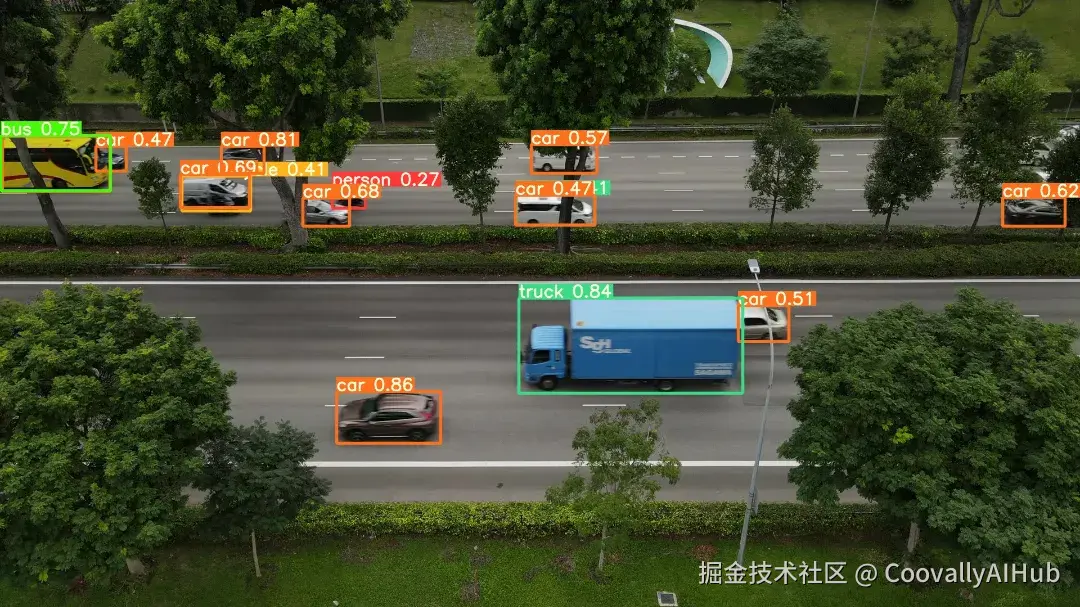
核心挑战: 目标尺度差异大(大货车 vs 电动车)、光照、天气等外部干扰频繁、场景变化快,要求高实时性
算法推荐:
- 首选:YOLOv8n/s、SSD-MobileNet → 推理速度200+FPS,边缘设备友好;
- 进阶:FFG-YOLO(改进YOLOv8)→ 针对小目标优化,融合全局上下文感知模块,抗干扰更强;
- 城市治理:破解"杂乱背景"中的关键目标
典型任务:
- 识别违章搭建或占道经营摊位
- 检测道路破损、井盖缺失
- 评估绿地覆盖率与垃圾堆放点分布
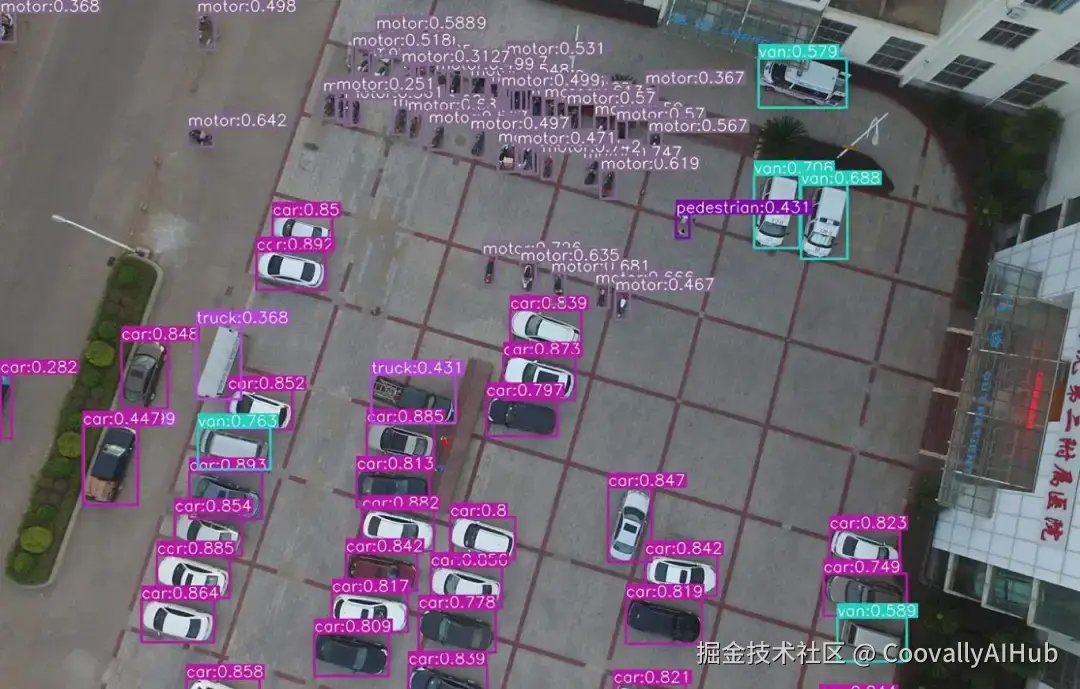
核心挑战: 目标碎片化(如井盖)、背景干扰多、小目标占比高
算法推荐:
- 基础方案:YOLOv8+小目标优化层 → 平衡速度与细节捕捉;
- 高精度方案:DETR/Swin Transformer → 更强上下文建模,适合高精细度任务;
- 铁路巡检:毫米级缺陷的"空中哨兵"
典型任务:
- 识别铁轨上的小型异物或螺栓缺失
- 检测接触网设备异常
- 分析护坡破损或沿线植被过密

核心挑战: 目标像素占比<0.1%、特征微弱、漏检风险高
算法推荐:
- 性价比之王:YOLO改进型小目标版本、FPN+ResNet、Cascade R-CNN;
- 精度优先:Cascade R-CNN+Swin Transformer → 级联检测头+全局注意力,微弱特征识别优势显著;
- 农业监测:农田健康的"AI医生"
典型任务:
- 识别水稻锈病、玉米螟等病虫害
- 分割杂草区域,辅助精准除草
- 分析干旱/洪涝对产量的影响

**核心挑战:**病斑纹理相似度高、目标边界模糊、光照阴影干扰。
算法推荐:
- 分割利器:DeepLabV3+、Mask R-CNN、YOLOv8+ViT/EfficientNet主干网络 → 像素级识别病虫害区域;
- 轻量新星:Swin Transformer、ViT → 出色的全局特征建模能力;
选型难?训练烦?优化贵?Coovally一站搞定!
分析完了不同场景下的算法选型思路,现在问题来了:
- 你愿意自己找模型、下代码、搭环境、调参数吗?
- 你愿意花几天甚至几周,只为试出一个还说不准对不对的模型吗?
** **
**
- 丰富的开源模型库!
在Coovally的模型仓库中,YOLOv3/v4/v5/v7/v8/11、Faster R-CNN、RetinaNet、DETR、DeepSort、Mask R-CNN... 主流和前沿模型触手可及 。你不用再四处寻找、下载、配置环境。

一键加载,自由组合! 想试试YOLOv8在铁路小目标上的效果?还是探索Mask R-CNN对农业病虫害的识别能力?点几下鼠标,模型就绪。
- 内置海量开源数据集 & 便捷数据管理!
Coovally 集成了或提供便捷接入众多权威开源航拍数据集,涵盖交通、城市、农业等多个领域。省去你80%的数据搜集整理时间!

即使你有自己的数据,平台提供强大的数据标注、管理、版本控制工具,让你的数据工作流井井有条。
- 高效训练平台 & 自动化!
告别复杂的命令行和配置!Coovally 提供直观的可视化训练界面,清晰设置参数,监控训练过程(Loss, mAP等指标实时可视化)。

并行实验,效率倍增! 想同时比较 YOLOv5s, YOLOv7-tiny在你的数据集上的表现?一键发起多个训练任务并行运行,结果一目了然,快速锁定候选者。支持分布式训练,充分利用硬件资源,大幅缩短训练时间。
- 大模型辅助提升
根据数据统计分布特点和任务类型等信息,基于多模态大模型技术自动推荐数据增强方法及模型选择建议。
** **
**
****Coovally还有多模态大模型智能推荐,根据模型配置信息和任务类型以及训练结果等信息,自动推荐优化建议,让模型迭代事半功倍!

- 模型优化与导出支持!
训练好的模型,Coovally 支持导出为多种通用格式(ONNX, TensorRT等) ,方便集成到你的无人机系统或业务平台。

- 总结优势:
- 大幅降低门槛: 算法工程师、行业专家甚至有一定基础的业务人员都能快速上手。
- 极大提升效率: 将算法选型、数据准备、训练试验的时间从数周/月缩短到数天/小时。
- 显著优化效果: 通过便捷的对比试验和大模型赋能,更容易找到或训练出性能更优的模型。
- 促进创新落地: 让企业和开发者更专注于业务逻辑和应用创新,加速无人机AI解决方案在各行各业的实际部署。
- 场景化价值重述:
- 交通管理部门: 快速找到实时性最优的算法,缓解拥堵。
- 城市管理者: 高效识别城市问题,提升管理精细化水平。
- 铁路工务段: 精准发现微小隐患,保障运输安全命脉。
- 农场主/农业服务商: 精准监测作物健康,实现科学种植,降本增效。
开启你的高效无人机AI之旅!
还在为无人机图像识别算法发愁?立即免费注册/体验 Coovally 平台! 开启一站式算法选型、训练、优化之旅。
随着无人机技术和AI算法的不断发展,Coovally将持续更新最前沿的模型和工具,成为你探索天空智能最可靠的伙伴!