Occ3D
https://tsinghua-mars-lab.github.io/Occ3D/
Occ3D: A Large-Scale 3D Occupancy Prediction Benchmark for Autonomous Driving
重点关注其数据集
提出了一个更为通用的Occ数据生成方式,可以用于生成不同场景下的高密度、所见即所得的Occ数据。主要包括三个步骤:1)体素稠密化,2)遮挡推理,3)图片引导refine
Method
分别基于nuscenes和waymo数据集生成Occ数据集,具体参数如图:
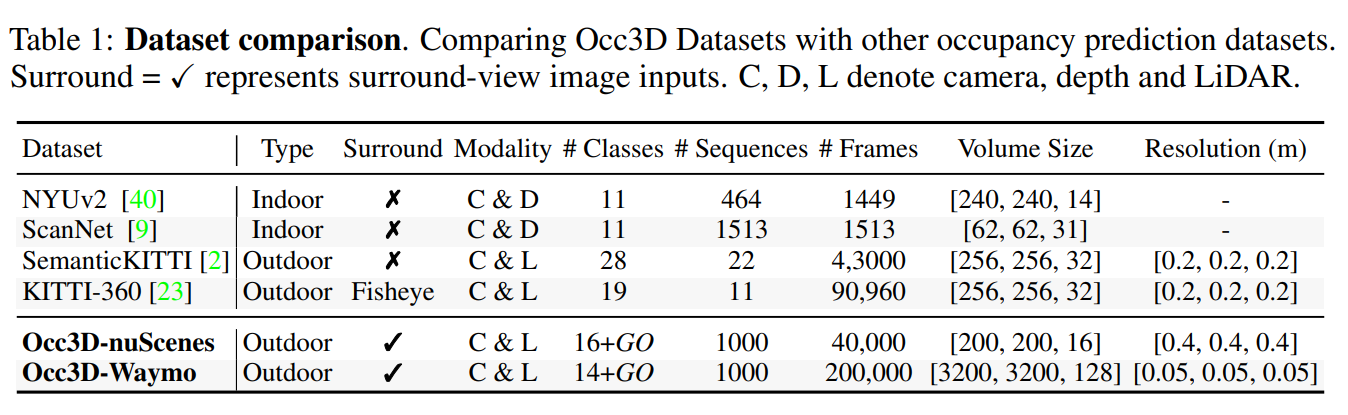
除了原有数据集中分割的类别,还增加了通用类别(general object,GO)的标注。
其中,nuscenes数据集的标注范围为-40m, -40m, -1m, 40m, 40m, 5.4m; waymo的标注范围为-80m, -80m, -1m, 80m, 80m, 5.4m
Dataset Construction Pipeline
完整的数据生成流程如图所示:
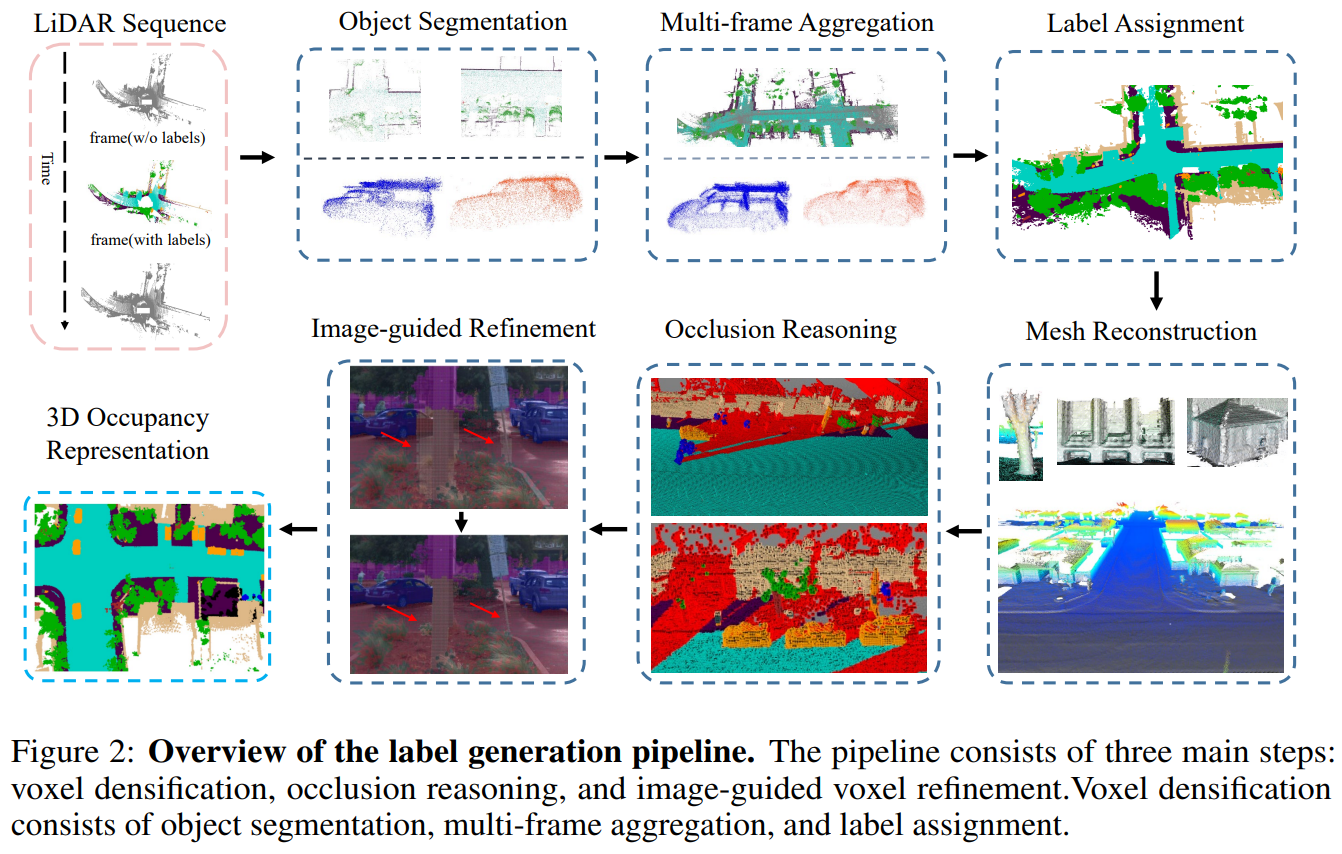
由于图像缺乏可靠的深度和尺度信息,因此仅利用图像进行Occ真值生成是不可能的。因此本文利用点云和其分割结果重建高质量的Occ真值,并解决了几个关键问题:1) 点云稀疏性问题,2) 遮挡问题,3) 点云与图像之间的对齐问题。
- Voxel Densification
- 关键帧叠帧,并对动/静态物体分开处理
- 引入非关键帧,利用KNN分配对应标签
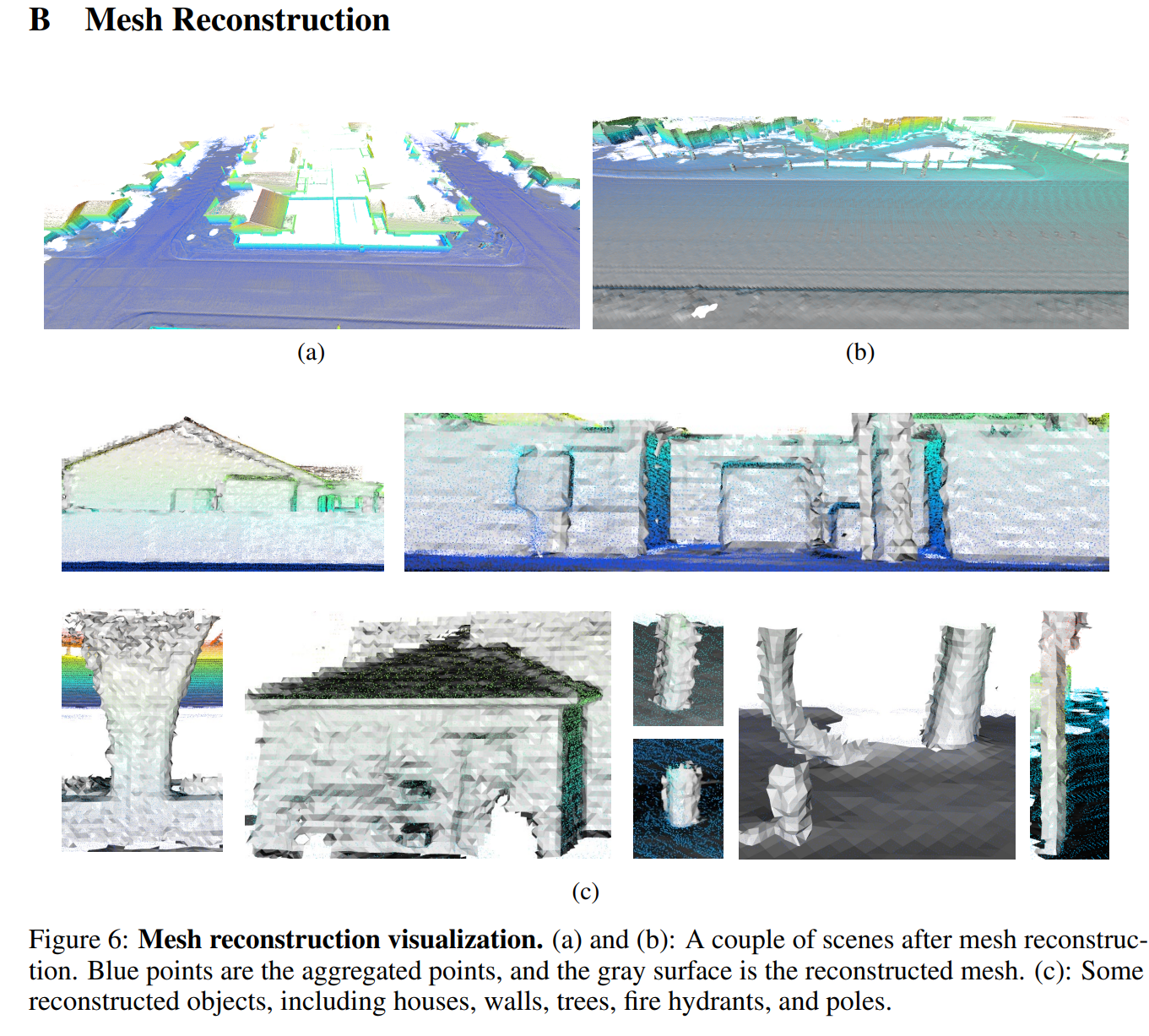
- 表面重建
对于非地面目标,使用VDBFusion进行表面重建;但对于地面目标,VDBFusion 会因光线角度过小导致 TSDF值不正确而失败。因此,本文将地面划分为多个区域,利用区域内的点来拟合表面网格进行泊松重建。
重建网格后,进行密集点采样,并再次利用KNN为采样点分配标签。
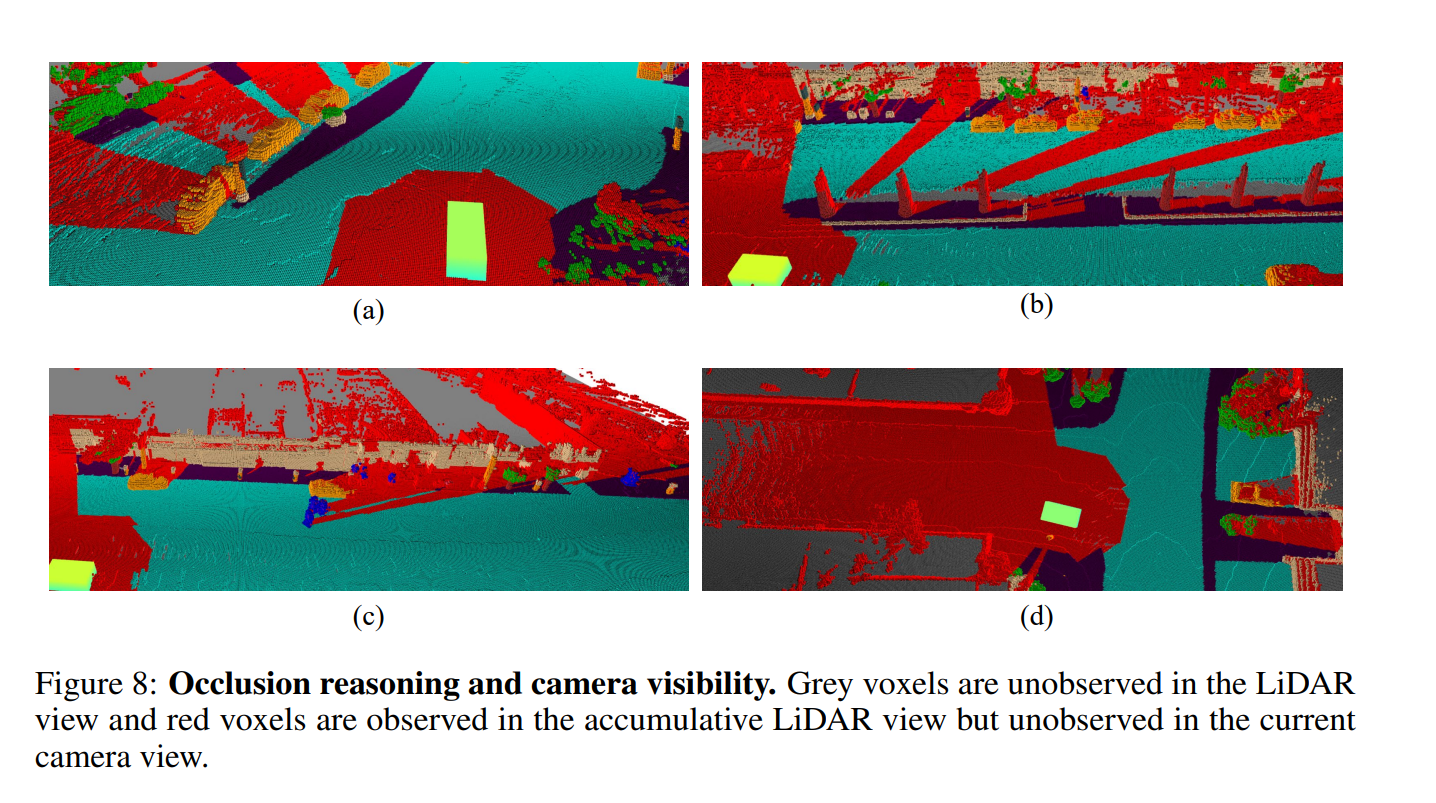
- Occlusion Reasoning for Visibility Mask
本文提出了遮挡推理,并分别应用于雷达和相机视角,从而生成可见性掩码。
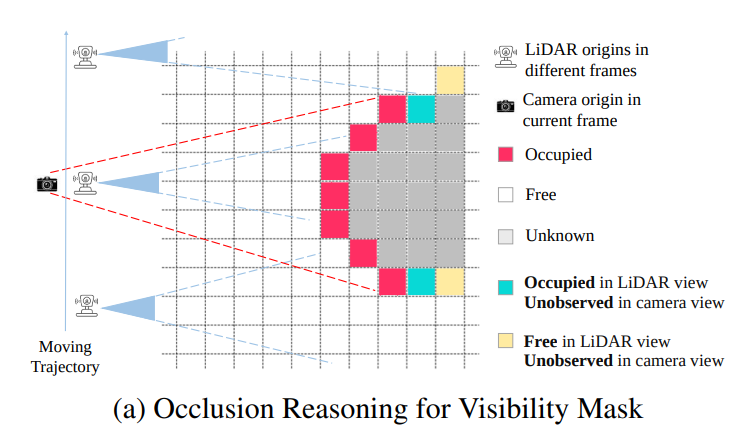
由于点云的稀疏性,很容易将空洞误以为是"free",因此本文采用叠帧数据下的射线广播的方法,如图a所示,如果该点位置反射了来自雷达的射线,则定义为"occupied",若an该点被射线o穿透,则定义为"free",除此之外,则定义为"unobserved"。
我们将每个被占据的体素中心与摄像机原点连接起来,从而形成一条射线。沿着每条射线,我们将第一个被占据的体素设为 "observed",其余的设为"unobserved"。相机射线未扫描到的任何体素也会被设置为 "unobserved"。
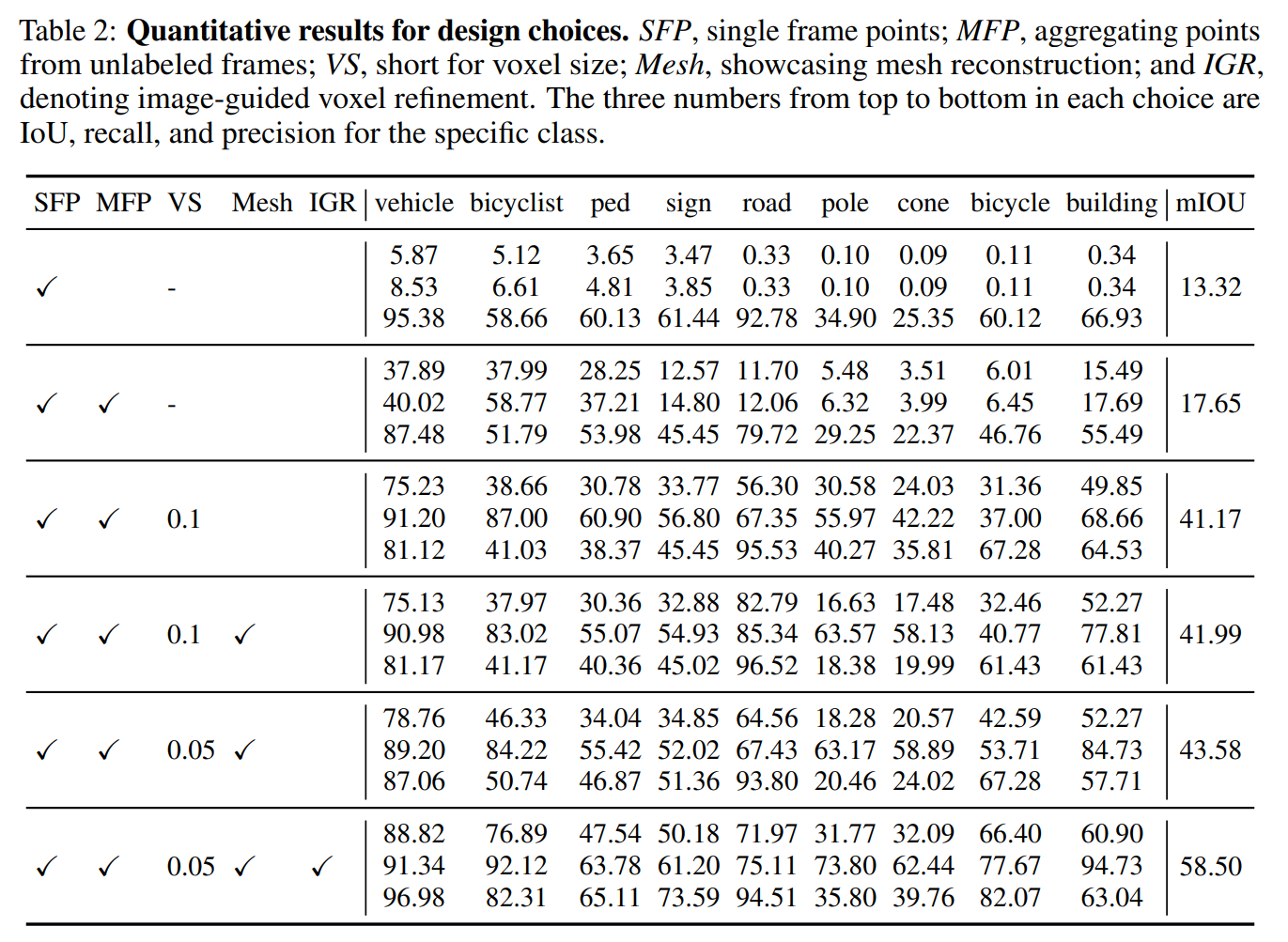
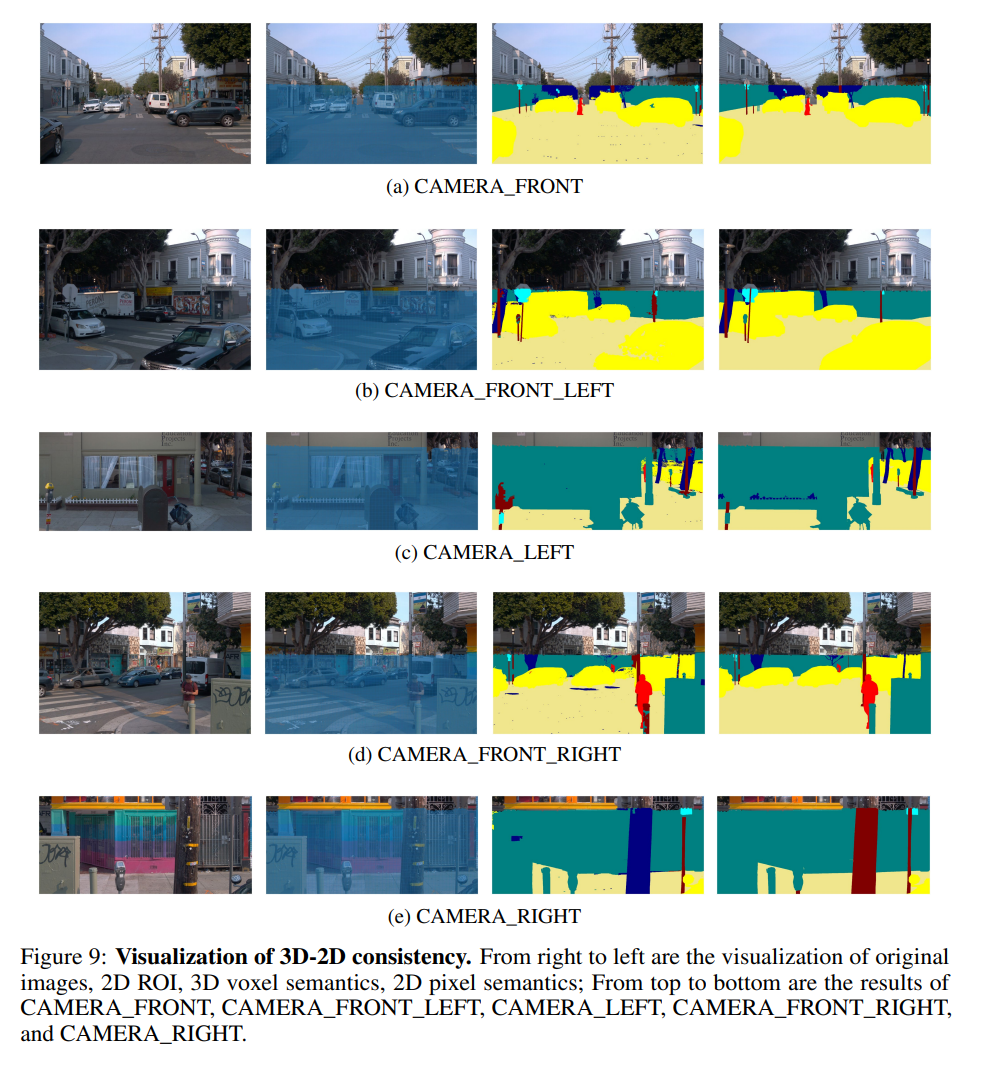
- Image-guided Voxel Refinement
由于雷达噪声和位姿偏移的影响,点云数据对于物体的观测会比实际物理尺寸要大,因此本文引入了图像引导的体素细化方法对结果进行细化和去噪。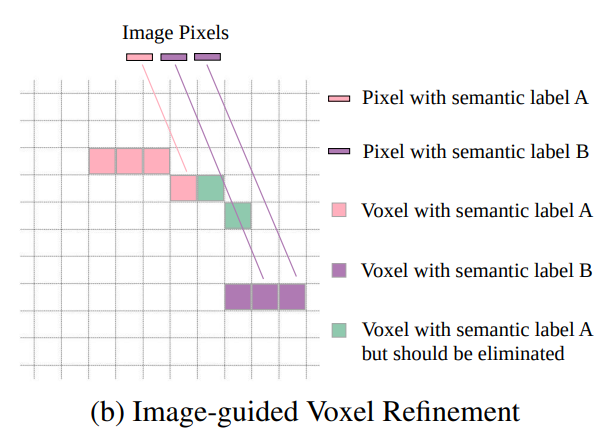
同样采用射线广播的方法,但这次我们使用的是相机射线,并使用相机图像作为参考。
Experiment