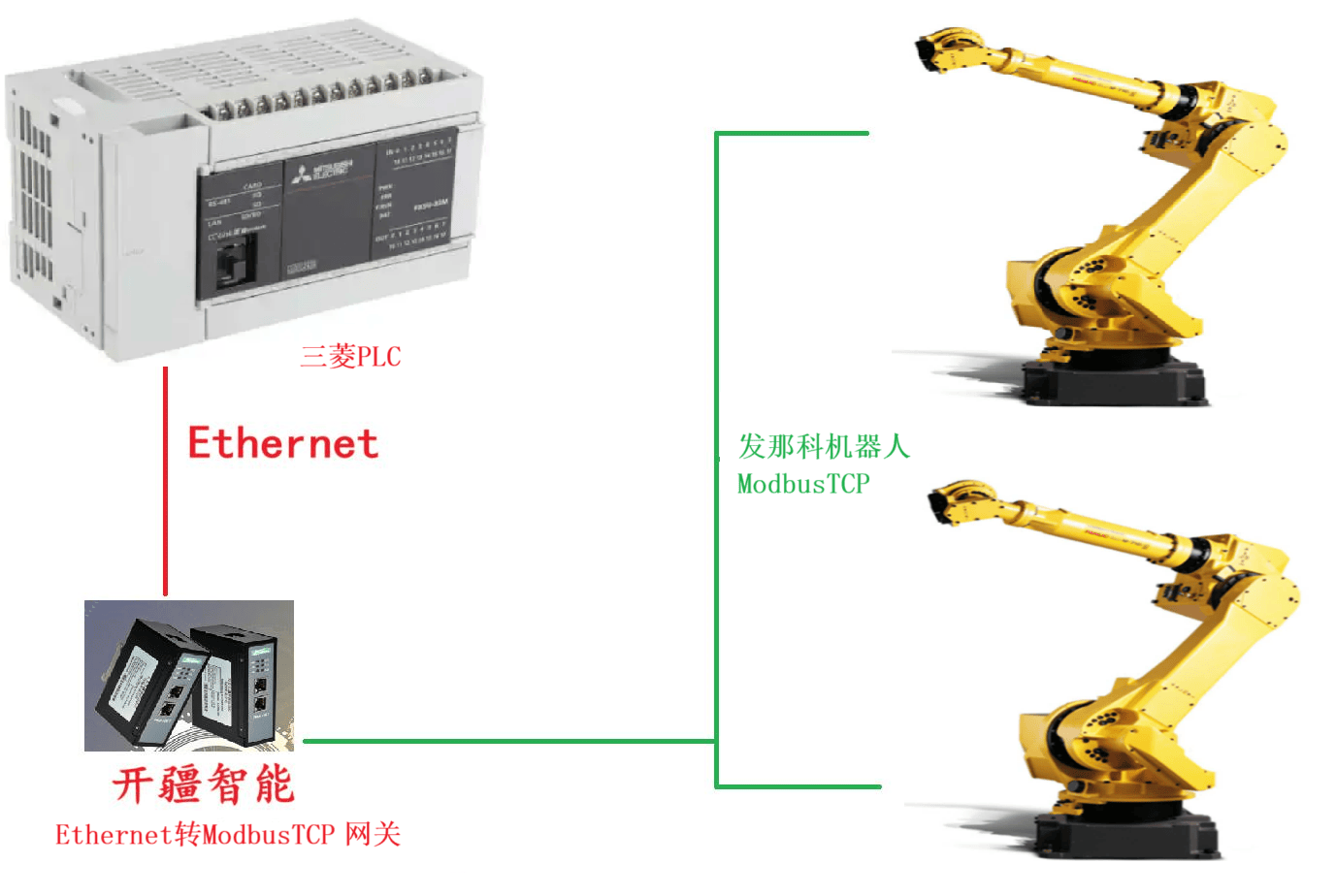
本案例是三菱FX5U PLC通过ethernet/IP转ModbusTCP网关对发那科机器人进行控制的配置案例。
PLC端主要配置
以太网端口设置
在通信测试中,PLC作为主站,在PLC设置中选择"以太网端口"非常关键,以确保通信测试的正常进行。
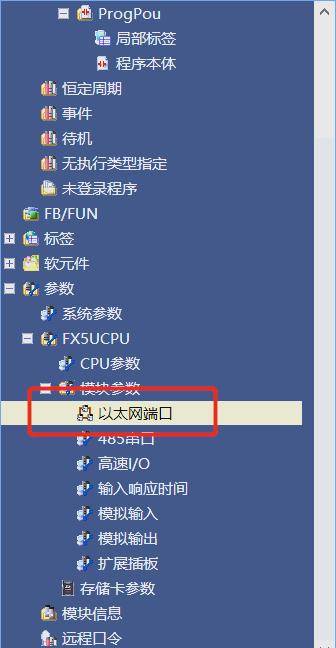
1、首先,在PLC设置中,选择"以太网端口"选项。
IP及网络配置
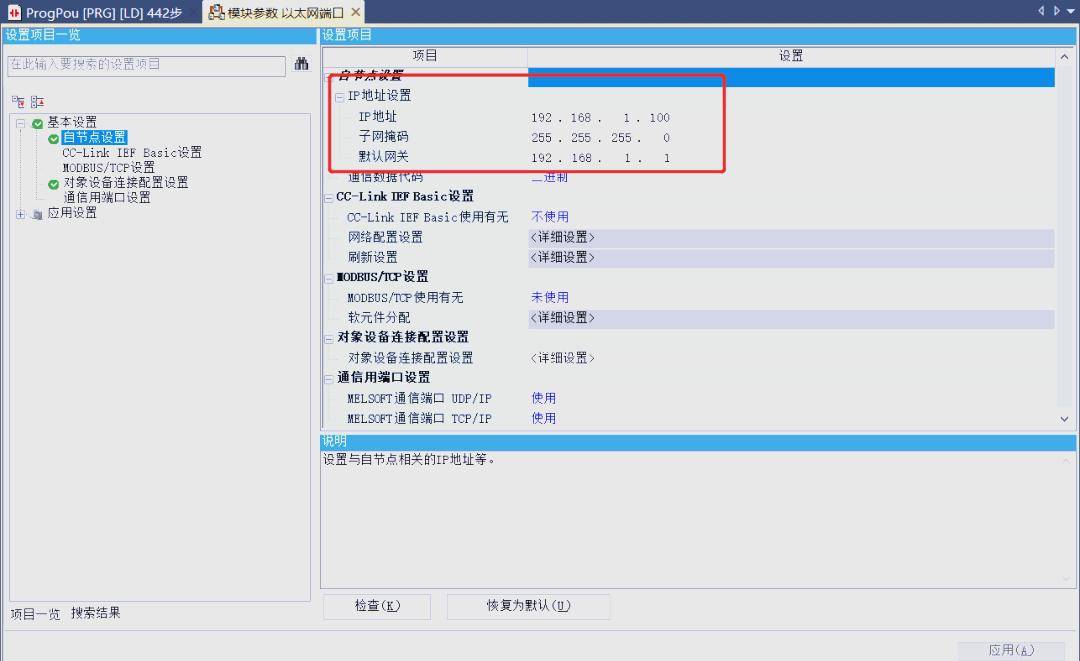
接下来,进行IP地址、子网掩码及默认网关的配置,以确保通信的准确性与稳定性。
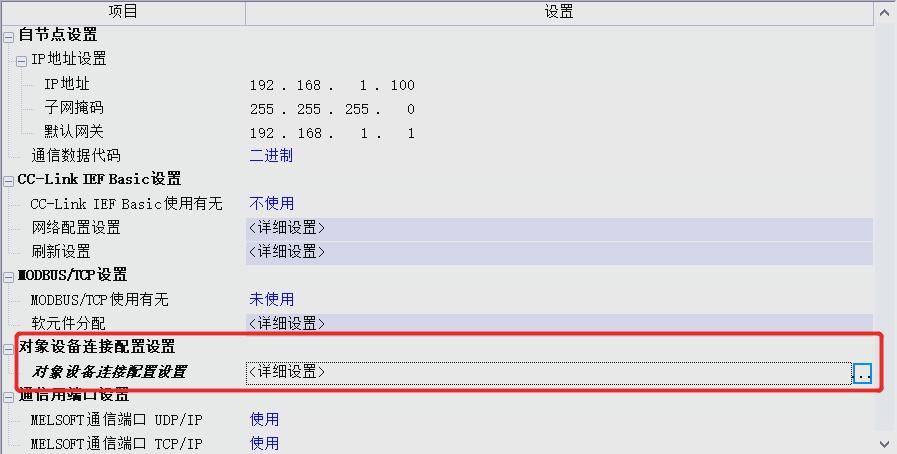
2、接下来,在PLC设置中,配置主站的IP地址为192.168.1.100,子网掩码设置为255.255.2550,并指定默认网关为192.168.1.1。
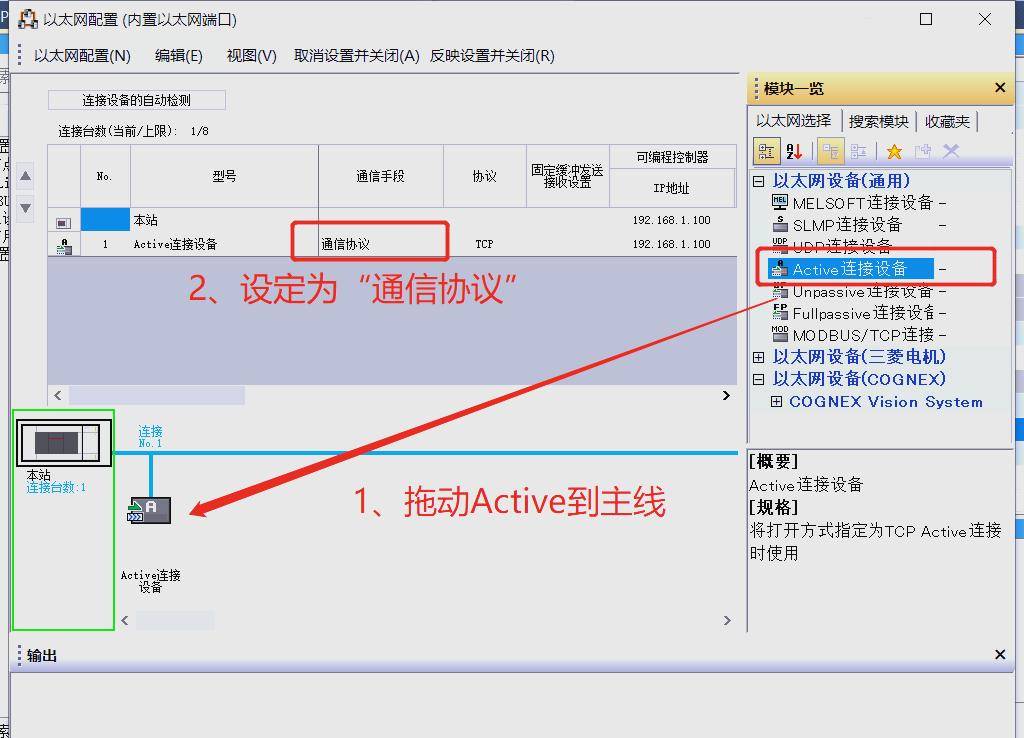
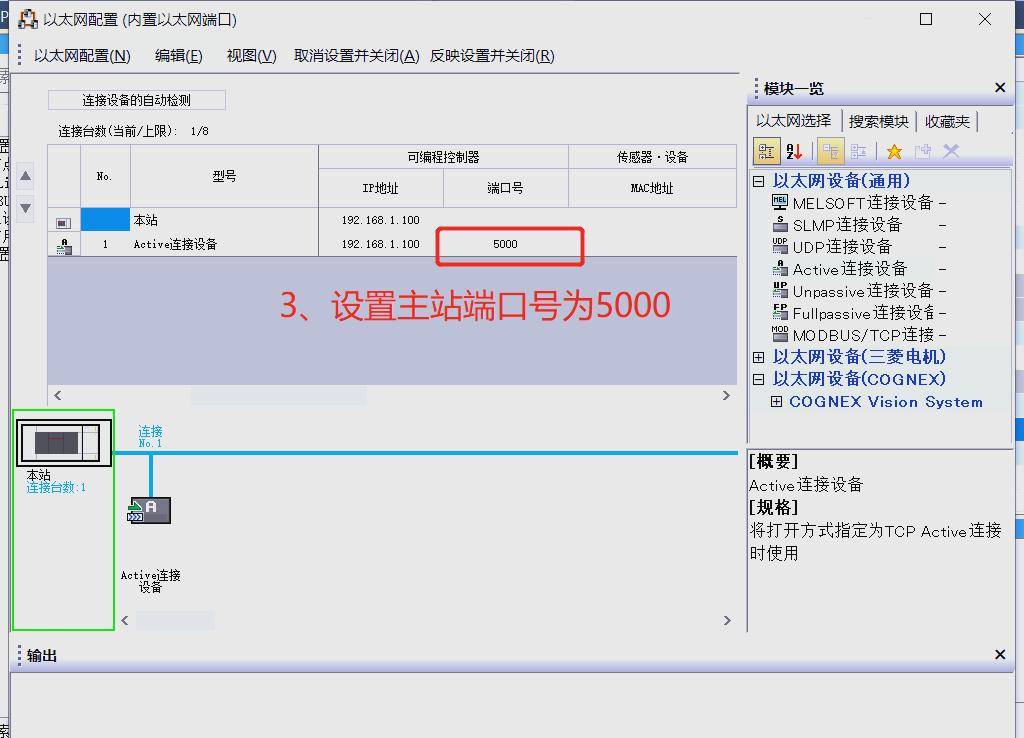
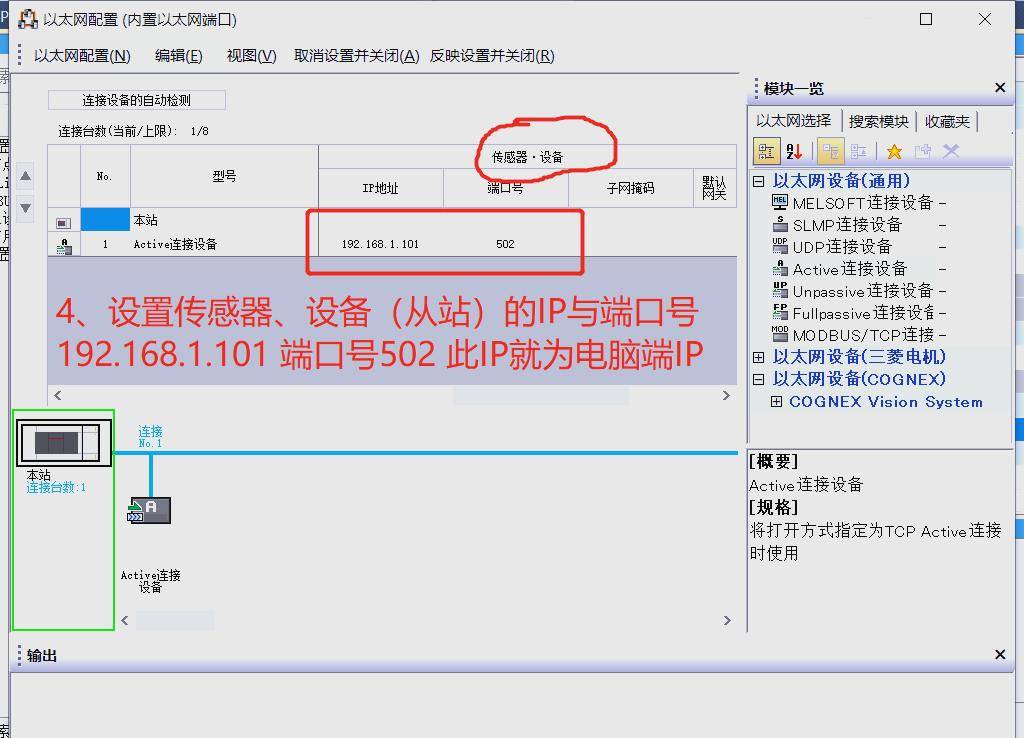
3、进行对象设备的连接配置。
4、在GX Works3软件中,找到并点击"工具"选项,然后选择"通信协议支持功能"进行设置,以确保三菱PLC能够正常支持通讯协议。
关键提示:在执行上述步骤时,请确保PLC与计算机的连接状态保持稳定,否则配置写入过程中可能会出现异常情况。

将组态下载进PLC
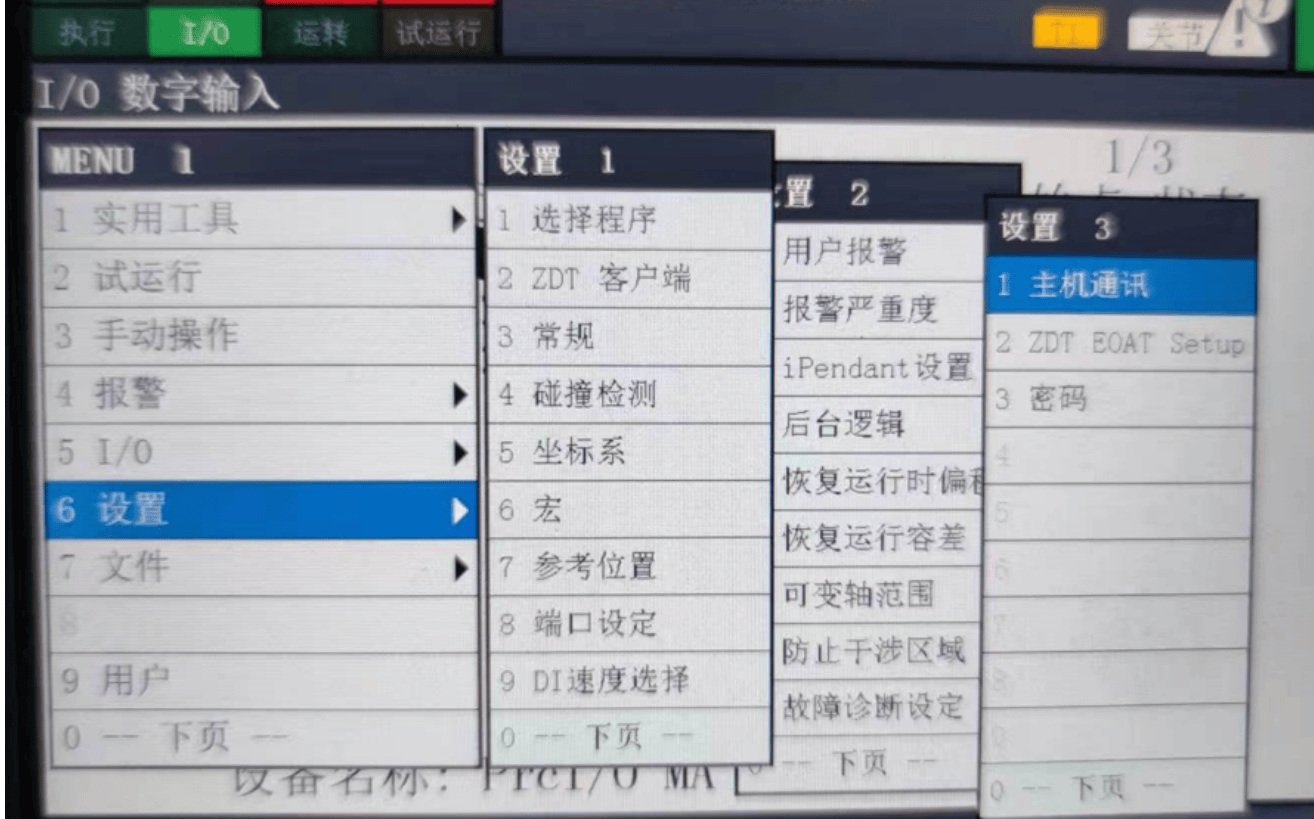
设置发那科机器人的TCP设置

设置TCP参数
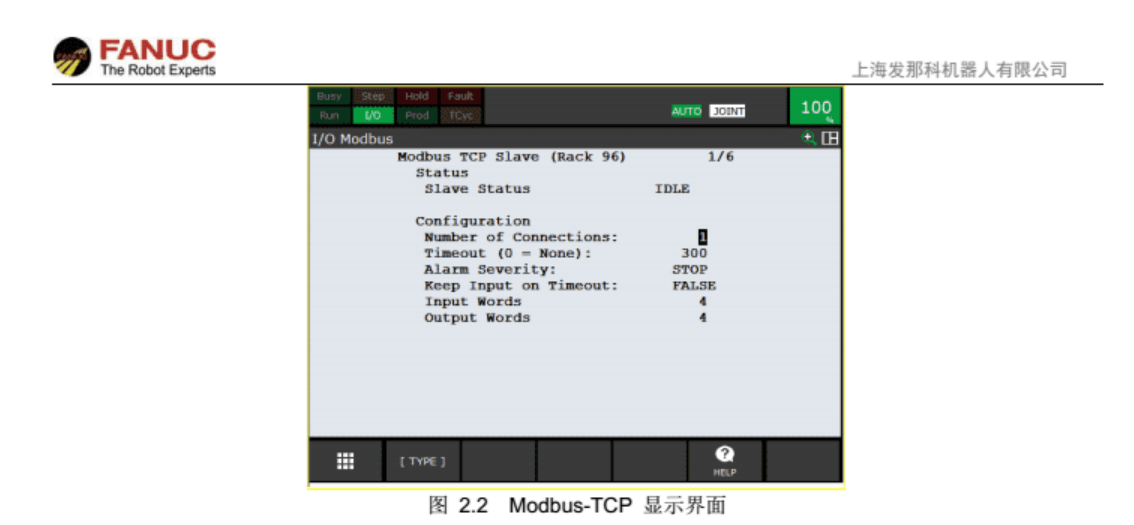
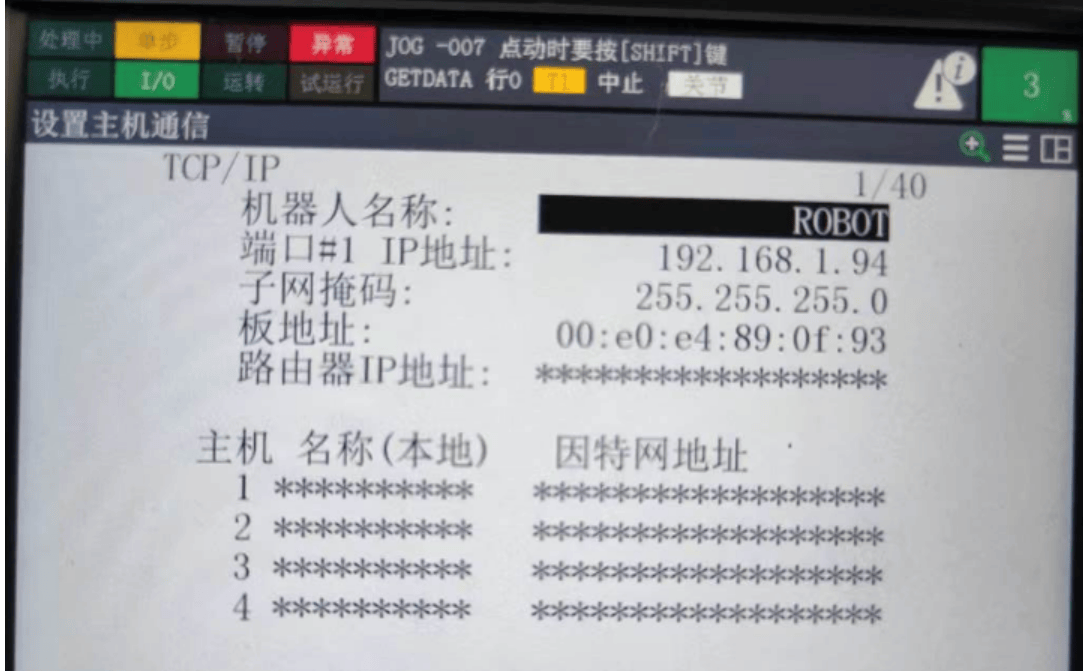
设置机器人的IP地址
设置连接数与输入输出数据长度
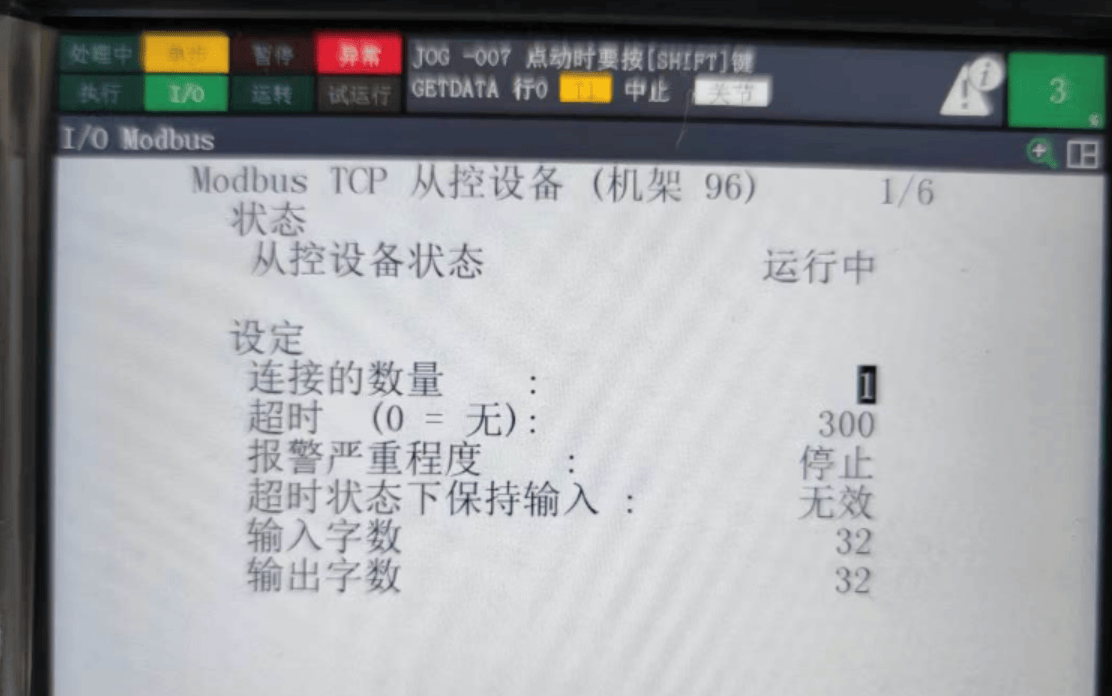
分配好机器人的IO点数
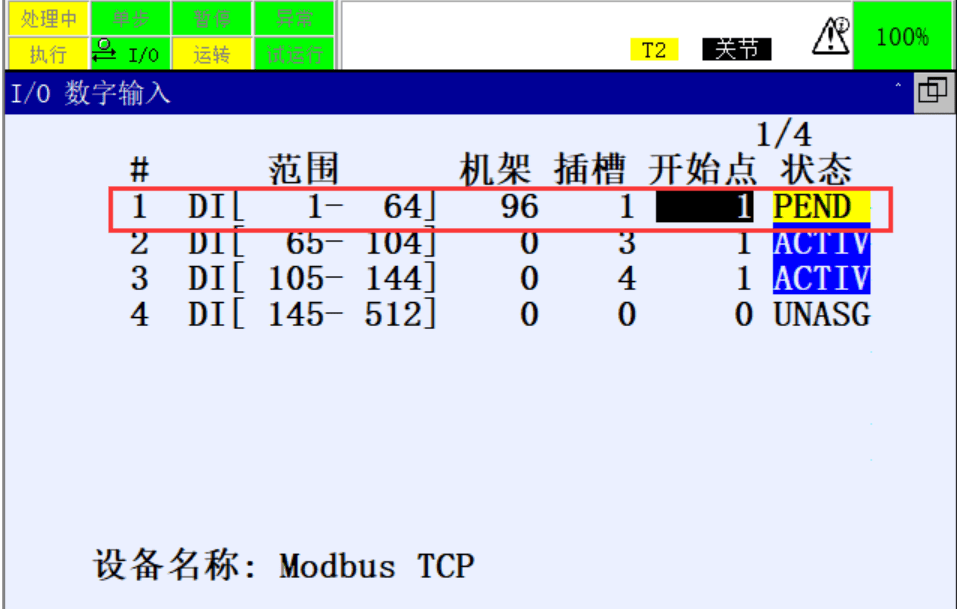
完成后将机器人重启使配置生效。
网关配置
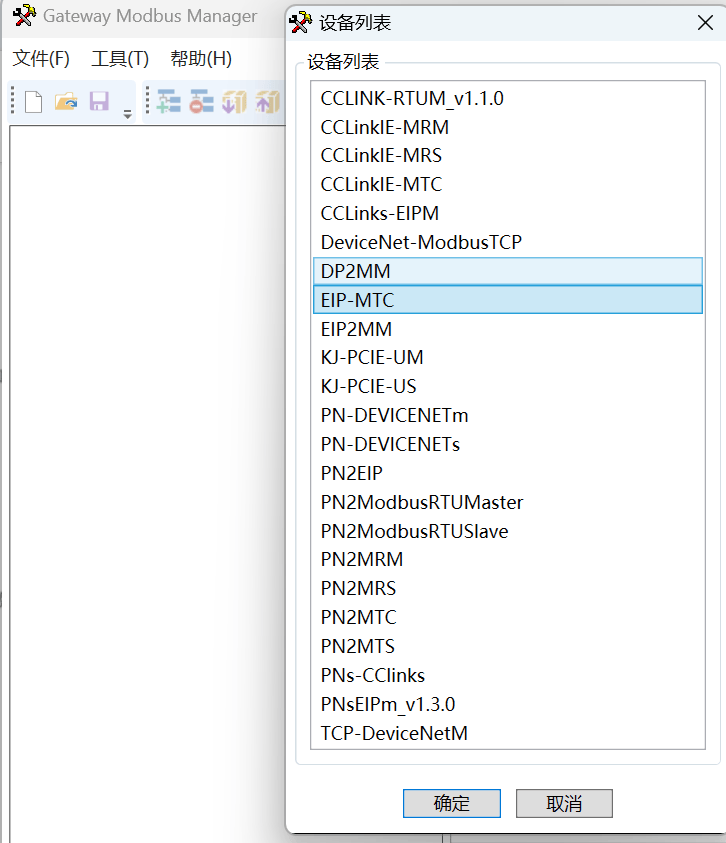
打开网关配置软件"Gateway Configuration Studio"并新建项目
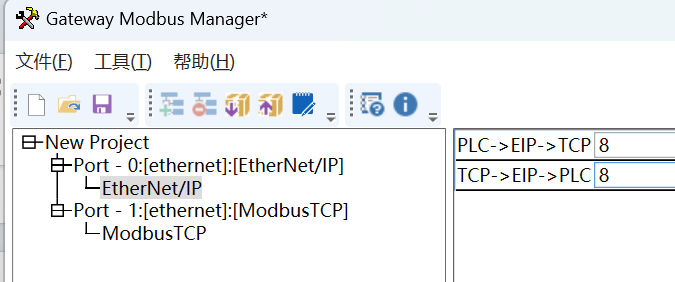
设置网关在Ethernet/IP的IP地址与输入输出数据长度。(IP地址与三菱PLC分配的地址保持一致)
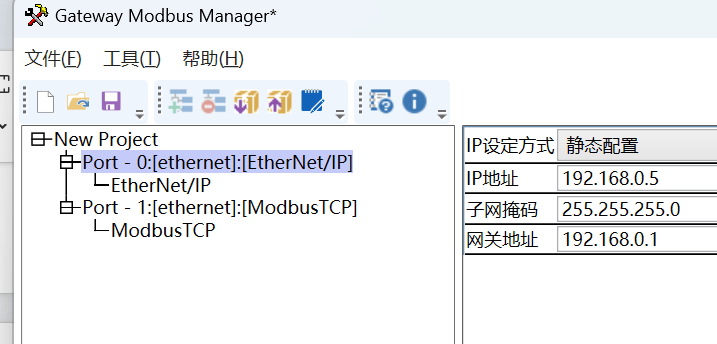
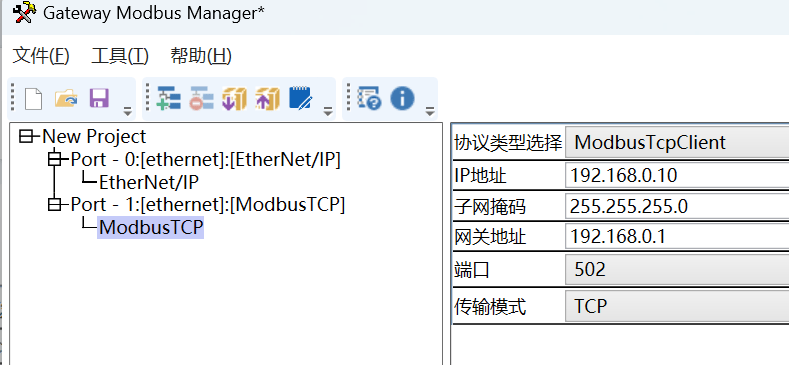
设置网关作为ModbusTCP客户端的IP地址,可与Ethernet不同网段。
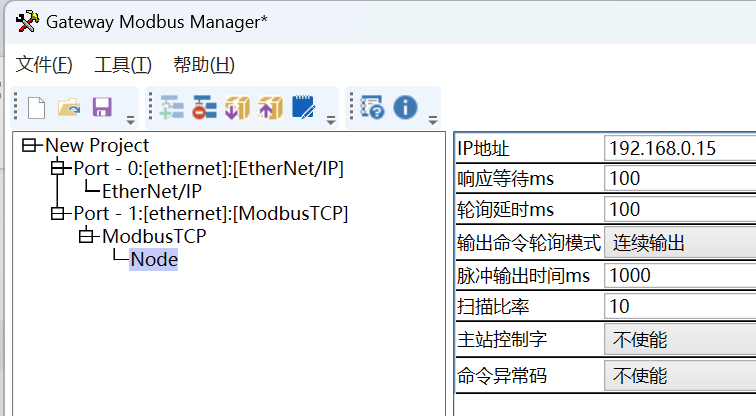
添加从站(发那科机器人)的IP地址
添加所需要功能码,可根据电能表手册进行设置。
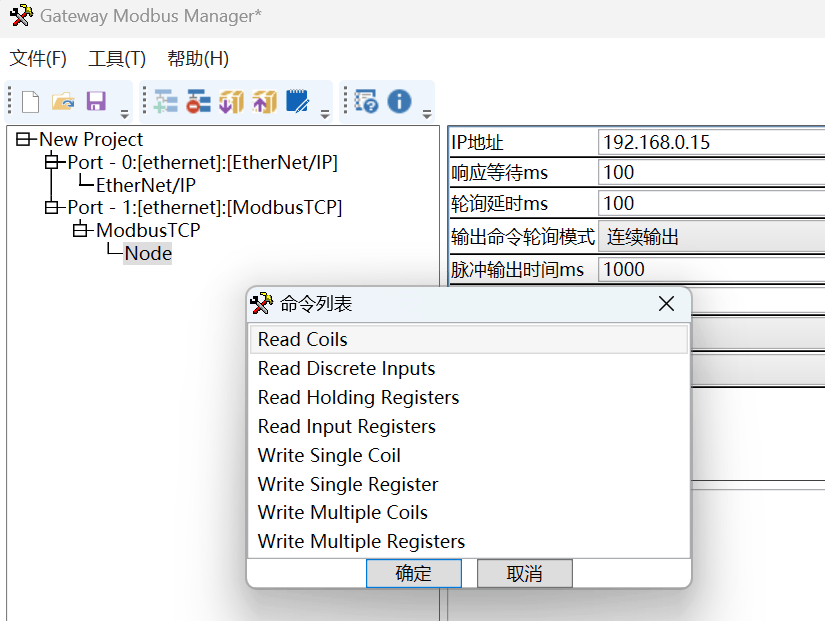
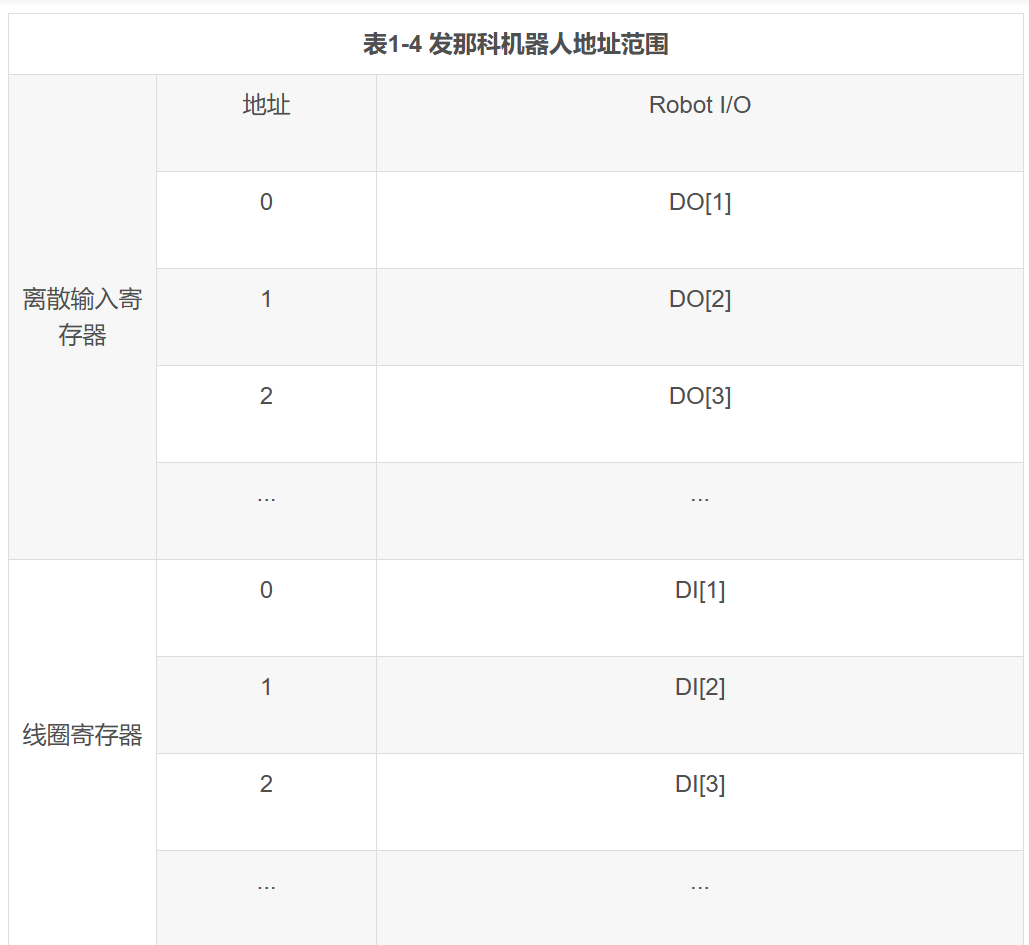
从手册得知机器人支持01/02/03功能码进行读取
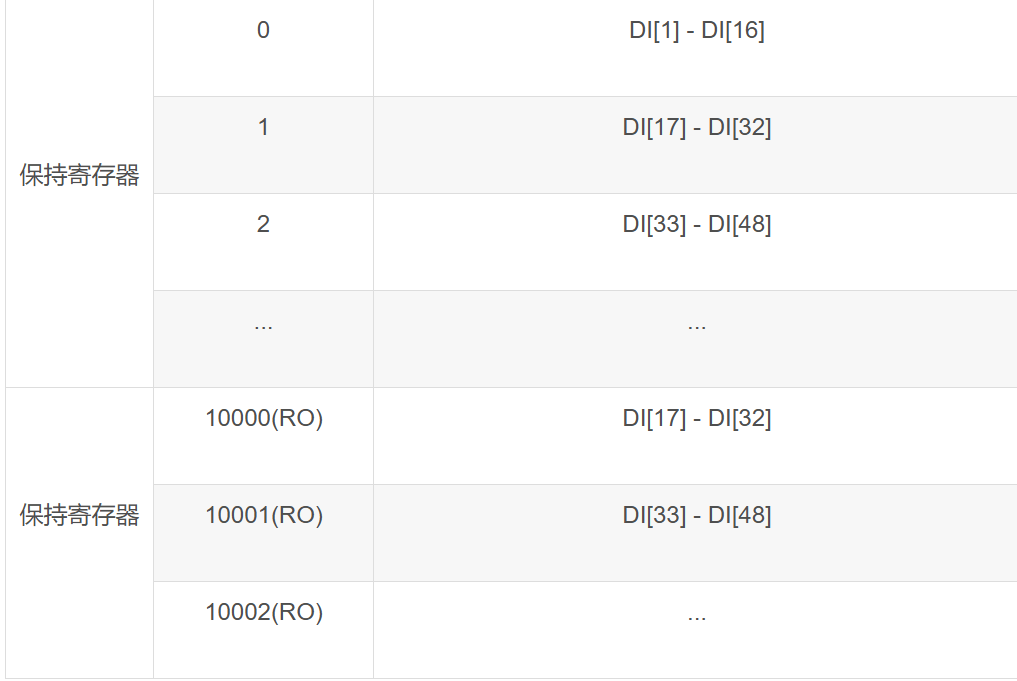
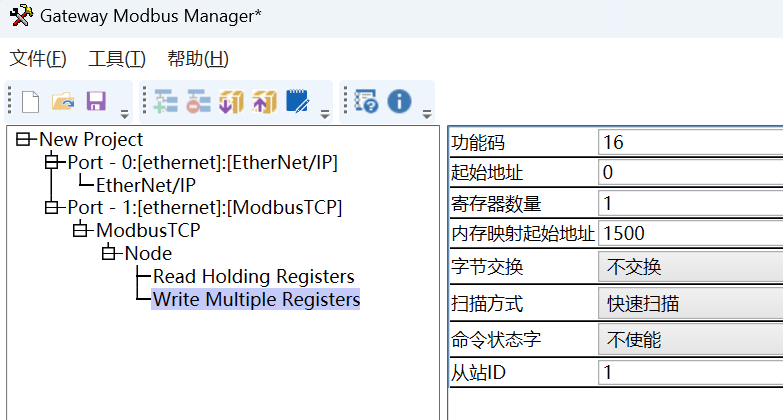
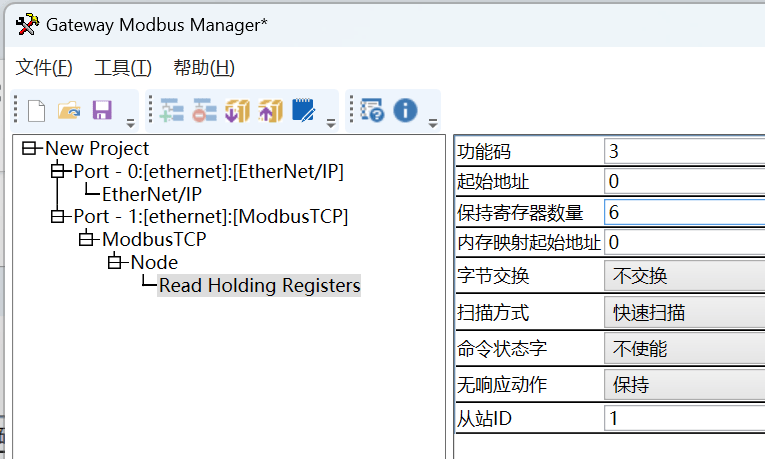
设置为03与16功能码,填写对应寄存器地址与寄存器数量。
如图所示,地址从0开始读取6个寄存器写一个寄存器
将配置下载进入网关即可正常进行通讯。
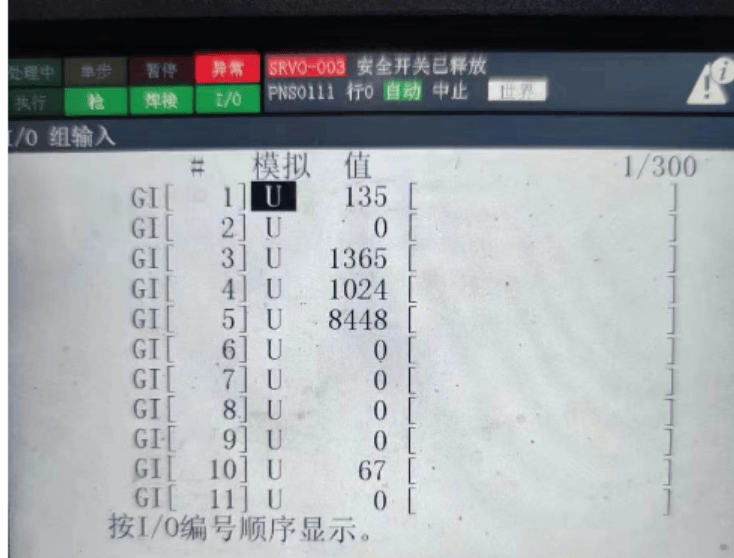
PLC给值后即可在机器人一侧读取到。