【免费开源】基于STM32的智能宠物喂食系统设计与实现(全流程技术详解)附源码
一、项目背景与意义
随着生活节奏的加快,越来越多的年轻人选择饲养宠物作为精神陪伴。然而,长时间工作或外出,往往导致无法按时喂食,从而影响宠物健康。 传统的手动喂食方式存在以下痛点:
- 时间不固定:主人无法保证每天同一时间投喂。
- 食量不稳定:每次投喂量可能不一致,容易造成肥胖或营养不足。
- 缺乏互动提醒:宠物进食状态无法实时获知。
为此,我们设计了一个 基于STM32的智能宠物喂食系统 ,集成定时喂食、远程控制、剩余粮检测、语音提示等功能,实现宠物喂食的智能化与自动化。
本项目不仅适合家庭应用,也可作为嵌入式开发课程设计、物联网实验项目的实践案例。
源码下载
完整项目已打包,开源免费:shangjinzhu.blog.csdn.net/article/det...
二、系统设计方案
1. 系统功能目标
- 定时喂食:支持多时段自动出粮
- 手动喂食:通过按键、红外遥控或手机APP触发
- 粮食余量检测:自动检测粮仓状态
- 语音播报:喂食时播放提示
- 可扩展联网 :通过WiFi模块连接物联网平台
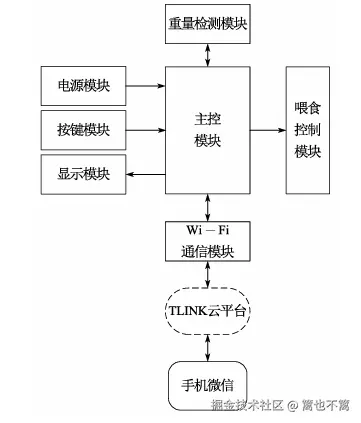
2. 系统总体框架
系统采用 模块化设计,分为主控单元、驱动执行单元、传感检测单元、人机交互单元和通信模块。
arduino
手机APP / 物联网云平台
│ WiFi/串口
┌─────────────────▼───────────────────┐
│ STM32F103C8T6 主控 │
└───────┬────────┬─────────┬─────────┘
│ │ │
舵机驱动 传感检测 显示与交互
│ │ │
粮口开合 红外/重量 OLED/按键/语音三、硬件设计与实现
1. 主控芯片
-
型号:STM32F103C8T6
-
理由:
- 72MHz主频,性能足够
- 外设丰富(I2C、USART、PWM、ADC)
- 低功耗,成本适中

2. 电机驱动与执行机构
- 驱动模块:L298N(直流/步进电机)或直接PWM驱动舵机
- 执行机构:MG996R金属齿舵机
- 工作原理:舵机接收PWM信号,控制粮口开合角度,实现精确定量出粮。
3. 实时时钟模块
- 型号:DS3231
- 特点:高精度、带温度补偿,掉电后靠纽扣电池维持计时。
4. 检测模块
- 红外对射传感器(检测碗内有无粮)
- 超声波模块HC-SR04(可检测粮仓余量)
- 重量传感器HX711(可实现定重量出粮)
5. 人机交互模块
- OLED显示屏(显示时间、状态)
- 按键(设置时间、手动喂食)
- 语音模块DFPlayer Mini(播放提示)
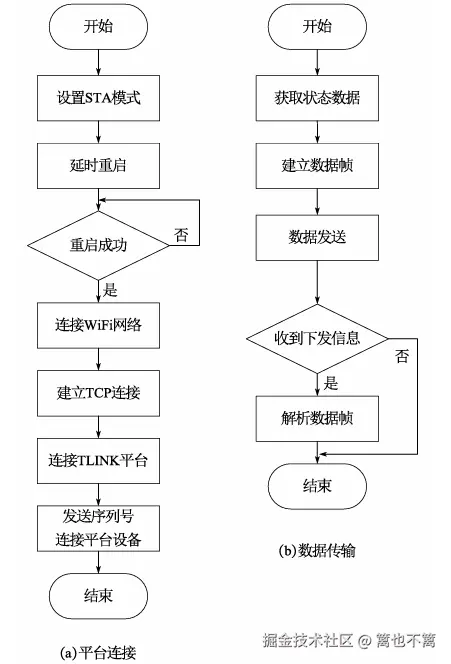
6. 可选物联网模块
- ESP8266 WiFi模块(远程控制与监控)
四、软件设计

1. 软件架构
软件采用分层设计:
- 硬件驱动层:GPIO、PWM、I2C、USART等底层驱动
- 设备控制层:舵机控制、传感器读取、RTC管理
- 应用逻辑层:定时喂食任务、手动触发任务
- 交互与通信层:OLED显示、按键输入、WiFi通信
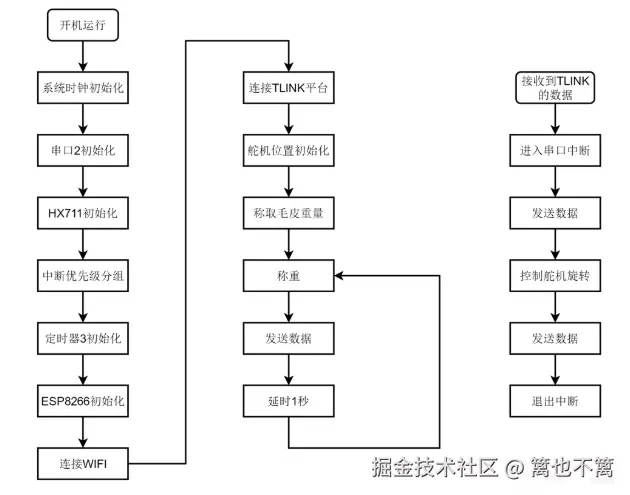
2. 控制流程图
markdown
┌───────────────┐
│ 系统上电初始化 │
└───────┬───────┘
│
▼
┌────────────────┐
│ 读取当前时间 │
└───────┬────────┘
│
▼
┌───────────────────┐
│ 是否到喂食时间? │───否──→ 循环检测
└───────┬───────────┘
│是
▼
┌───────────────────┐
│ 打开粮口舵机 │
└───────┬───────────┘
│
▼
┌───────────────────┐
│ 延时 & 关闭粮口 │
└───────────────────┘五、代码实现(核心部分)
1. 舵机控制(PWM)
c
void Servo_SetAngle(uint16_t angle) {
uint16_t pulse = 500 + (angle * 2000) / 180;
TIM_SetCompare1(TIM3, pulse);
}2. 定时喂食判断
c
uint8_t Time_Match_FeedSchedule(void) {
RTC_TimeTypeDef time;
RTC_GetTime(&time);
for (int i = 0; i < FEED_COUNT; i++) {
if (time.Hours == feed_time[i].hour &&
time.Minutes == feed_time[i].minute) {
return 1;
}
}
return 0;
}3. 喂食执行函数
c
void Feed_Pet(void) {
OLED_ShowString(0,0,"Feeding...");
Servo_SetAngle(90);
Delay_ms(2000);
Servo_SetAngle(0);
OLED_ShowString(0,2,"Done");
}六、接线与实物说明
- 舵机 → STM32
PA6(PWM输出) - RTC DS3231 → I2C接口
PB6(SCL)、PB7(SDA) - OLED → 同RTC共I2C
- 红外传感器 → GPIO输入
PA0 - 语音模块 → UART
PA9(TX)、PA10(RX) - WiFi模块 → UART
PB10、PB11

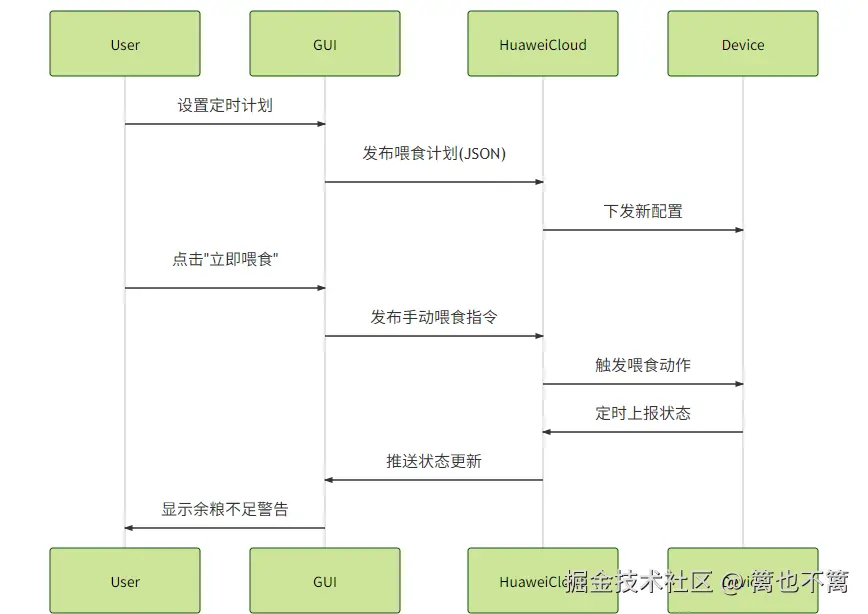
七、功能演示与效果
-
定时喂食
- 设定每天两次喂食,系统自动开合粮口。
-
手动喂食
- 按键触发或手机APP控制。
-
余粮检测
- 红外/重量检测模块检测余粮状态,OLED实时显示。
-
语音提示
- 每次喂食时播放提示音。
-
物联网扩展
- 通过WiFi上传喂食记录到云端。
八、扩展与优化建议
- 摄像头监控:加装ESP32-CAM实现远程视频
- AI识别:检测宠物是否在碗前,避免浪费
- 自动补粮:根据重量传感器数据自动调整出粮量
- 数据统计:记录每次喂食量与时间
九、总结
本系统以 STM32F103 为核心,结合舵机、电机驱动、RTC、传感器、语音和物联网模块,实现了一个高可用性的智能宠物喂食平台。 在实践中,该系统可显著提升宠物照顾的效率与便捷性,同时也是一个嵌入式+物联网+机械结构综合应用的优秀案例。 基于STM32的宠物喂食系统,是一个将嵌入式开发、传感器应用、机械控制与物联网技术有机融合的完整项目。 通过STM32F103作为核心控制单元,结合RTC实现精准定时,利用舵机精确控制粮口开合,并配合红外、重量等传感器实现余粮检测,辅以OLED显示与语音播报,使喂食过程更加智能化与可视化。
该系统不仅满足了宠物定时、定量、可远程控制的实际需求,还具备良好的扩展性,可接入WiFi实现云端监控、数据统计,甚至引入AI识别进行个性化喂食策略。 对于开发者而言,它既是一个实用的家居智能化案例,也是一个涵盖硬件、软件、通信、机械结构等多领域知识的综合性嵌入式项目,非常适合作为课程设计、毕业设计或个人物联网实践的选题。