目的:导入机械臂的fbx模型,利用C#编写脚本实现机械臂的自主运动
步骤
1.在 Unity 中,右键点击 "Assets" 文件夹,选择 "Create" -> "C# Script" 来创建一个新的 C# 脚本命名为 "ArmController"。
2.双击打开脚本,编写代码来控制机械臂的运动。
cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class ArmController : MonoBehaviour
{
// 关节引用
public Transform A1;
public Transform A2;
public Transform A3;
public Transform A4;
public Transform A5;
public Transform A6;
// 旋转速度(度/秒)
public float A1Speed = 30f;
public float A2Speed = 30f;
public float A3Speed = 30f;
public float A4Speed = 30f;
public float A5Speed = 30f;
public float A6Speed = 30f;
// 每个关节的旋转方向(1为正方向,-1为反方向)
private int A1Direction = 1;
private int A2Direction = 1;
private int A3Direction = 1;
private int A4Direction = 1;
private int A5Direction = 1;
private int A6Direction = 1;
// 每个关节独立的角度范围设置
[Header("A1关节角度范围")]
public float A1MinAngle = 0f;
public float A1MaxAngle = 150f;
[Header("A2关节角度范围")]
public float A2MinAngle = 0f;
public float A2MaxAngle = 150f;
[Header("A3关节角度范围")]
public float A3MinAngle = 0f;
public float A3MaxAngle = 150f;
[Header("A4关节角度范围")]
public float A4MinAngle = 0f;
public float A4MaxAngle = 150f;
[Header("A5关节角度范围")]
public float A5MinAngle = 0f;
public float A5MaxAngle = 150f;
[Header("A6关节角度范围")]
public float A6MinAngle = 0f;
public float A6MaxAngle = 150f;
void Update()
{
RotateJoint(A1, ref A1Direction, A1Speed, Vector3.up, A1MinAngle, A1MaxAngle);
RotateJoint(A2, ref A2Direction, A2Speed, Vector3.forward, A2MinAngle, A2MaxAngle);
RotateJoint(A3, ref A3Direction, A3Speed, Vector3.forward, A3MinAngle, A3MaxAngle);
RotateJoint(A4, ref A4Direction, A4Speed, Vector3.right, A4MinAngle, A4MaxAngle);
RotateJoint(A5, ref A5Direction, A5Speed, Vector3.forward, A5MinAngle, A5MaxAngle);
RotateJoint(A6, ref A6Direction, A6Speed, Vector3.right, A6MinAngle, A6MaxAngle);
}
// 关节旋转控制函数,带独立角度范围参数
private void RotateJoint(Transform joint, ref int direction, float speed, Vector3 axis, float minAngle, float maxAngle)
{
if (joint == null) return;
// 获取当前关节在指定轴上的旋转角度
float currentAngle = Mathf.Repeat(joint.localEulerAngles[GetAxisIndex(axis)], 360f);
// 处理角度超过180度的情况(转换为负角度便于判断)
if (currentAngle > 180f)
{
currentAngle -= 360f;
}
// 检查是否达到角度限制,需要反转方向
if (currentAngle >= maxAngle)
{
direction = -1;
}
else if (currentAngle <= minAngle)
{
direction = 1;
}
// 应用旋转
joint.Rotate(axis, direction * speed * Time.deltaTime);
}
// 获取轴对应的索引(x=0, y=1, z=2)
private int GetAxisIndex(Vector3 axis)
{
if (axis == Vector3.right) return 0; // x轴
if (axis == Vector3.up) return 1; // y轴
if (axis == Vector3.forward) return 2; // z轴
return 0;
}
}3.将编写好的脚本**ArmController**挂载到机械臂的根节点 GameObject 上(即拖到整个机械臂模型的最上层父节点)。
4.在 Unity 编辑器中,选中挂载脚本的机械臂根节点,在 "Inspector" 面板中设置脚本组件的各个公共变量。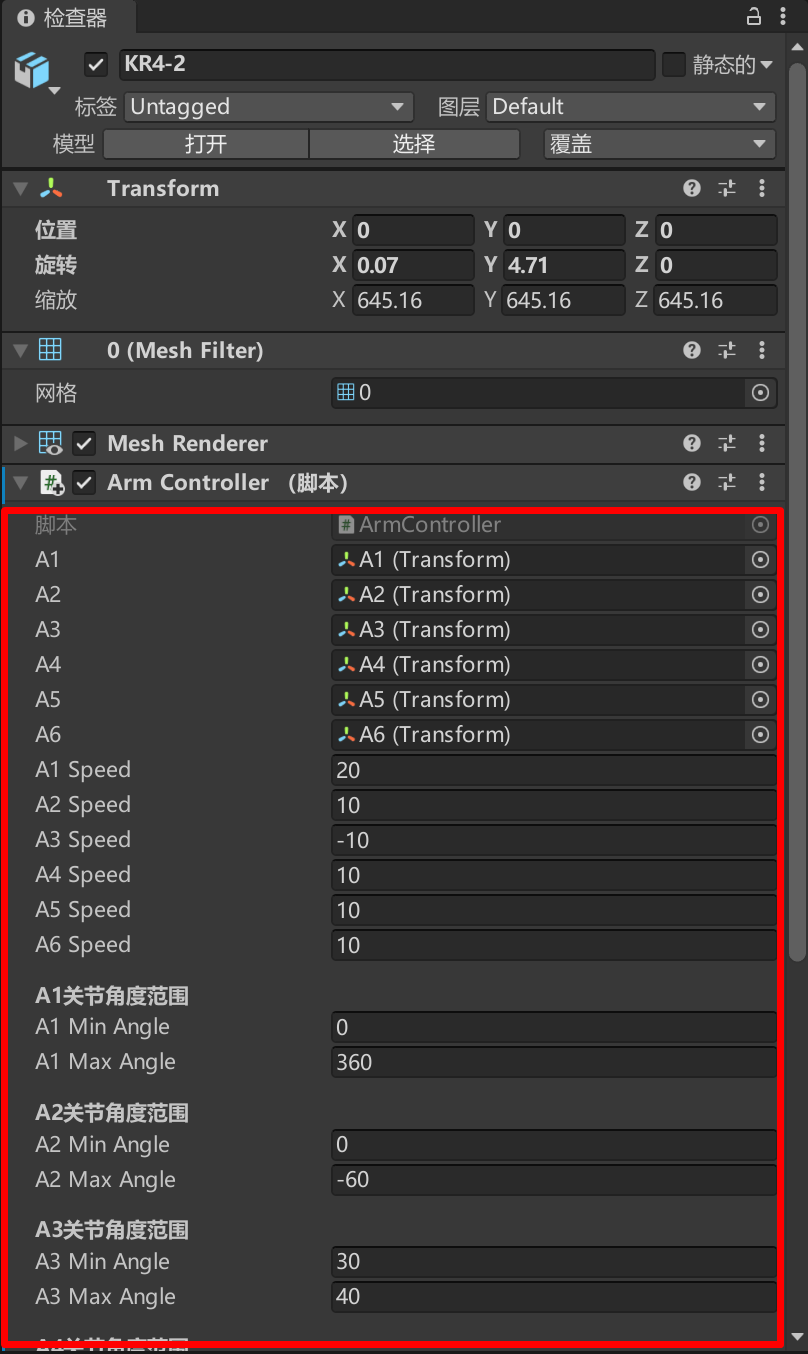
5.点击 Unity 编辑器上方的 "Play" 按钮,运行场景进行自主运动。