标题:<GAP: Gaussianize Any Point Clouds with Text Guidance>
论文:https://arxiv.org/pdf/2412.01931
来源:南京大学;复旦大学;华为诺亚实验室
主页:https://weiqi-zhang.github.io/GAP.
文章目录
摘要
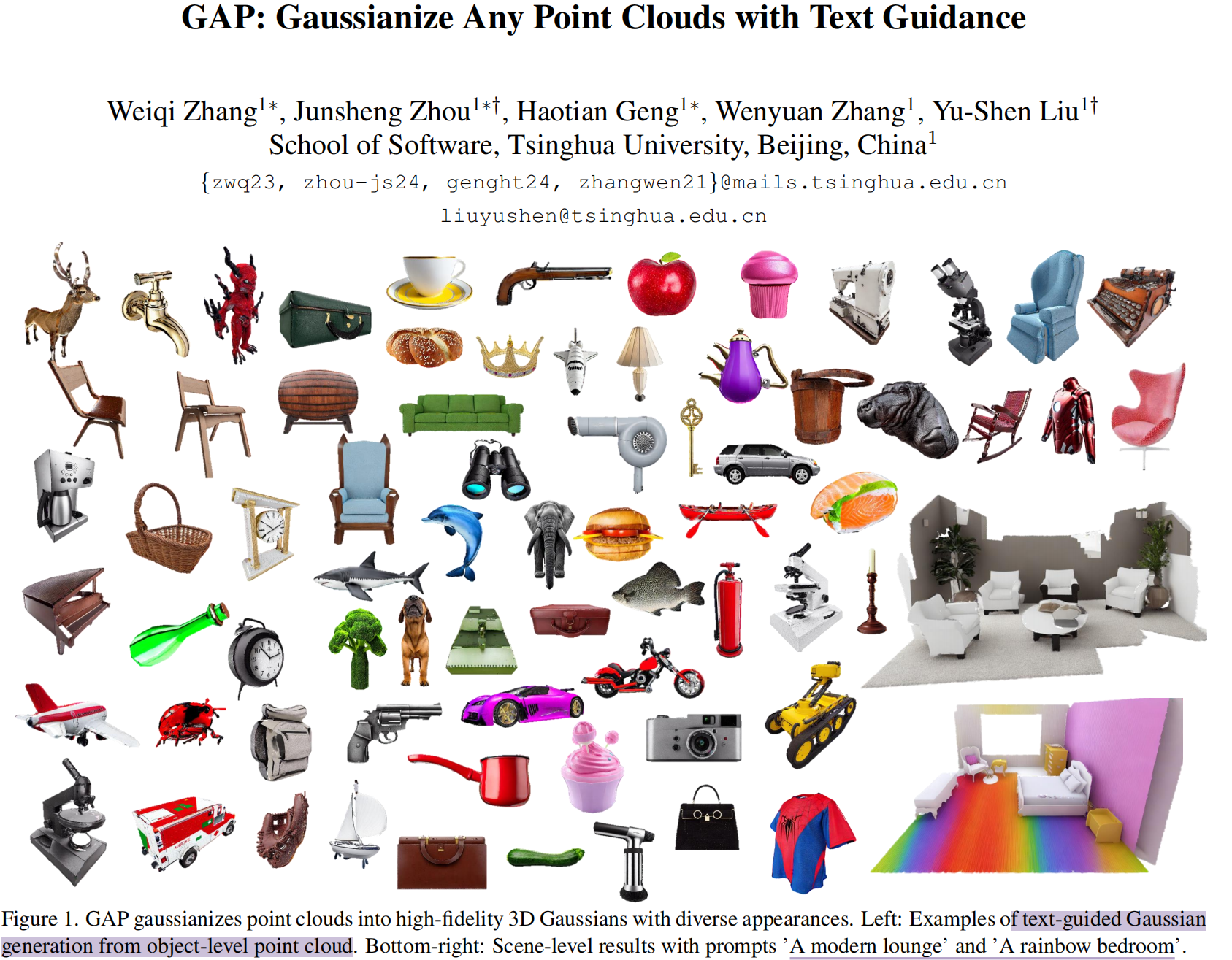
三维高斯泼溅(3DGS)在实现快速高效渲染方面展现出显著优势。但是点云作为三维数据表征形式,被广泛应用且易于获取,弥合点云与高斯分布之间的鸿沟变得愈发重要 。本文提出GAP,通过文本引导将无颜色点云高效转化为高保真三维高斯泼溅。
GAP设计了一个多视图优化框架,通过深度感知图像扩散模型实现不同视角下外观的一致性 。为确保几何精度,引入 surface-anchoring机制,在优化过程中约束3DGS始终位于三维形状的表面 。此外,GAP还整合了基于扩散的修复(inpaint)策略,专门针对难以观测区域进行补全 。我们在点云到高斯分布生成任务中对GAP进行了多尺度验证,涵盖从合成点云到复杂真实场景扫描,乃至大规模场景的多种复杂程度
二.3DGS初始化
三维高斯样条(3DGS)24是一种现代建模技术,通过一组高斯基元来构建三维形状或场景。每个高斯基元 g i g_i gi由一组参数定义,这些参数表征其几何特征和外观属性。该基元的几何结构在数学上由其中心位置 σ i ∈ R 3 σ_i∈R^3 σi∈R3和协方差矩阵 Σ i Σ_i Σi共同定义,具体表达式如下:

协方差矩阵 Σ i Σ_i Σi由旋转矩阵 r i ∈ R 4 r_i∈R^4 ri∈R4和缩放矩阵 s i ∈ R 3 s_i∈R^3 si∈R3构成(即 Σ i = r i s i s i T r i T Σ_i=r_is_is_i^Tr_i^T Σi=risisiTriT)。该矩阵决定了高斯分布的形状、方向及空间范围。除了几何参数外,每个高斯分布还包含视觉属性,例如不透明度参数oi和视图相关色彩特性ci,这些属性均采用球谐函数实现。
初始化 。 将高斯基元的中心位置 σ i σ_i σi直接设为输入点云 P = P= P={ p i p_i pi} i = 1 N ^N_{i=1} i=1N的空间坐标,其大致呈现底层三维表面特征。为更好利用点云中嵌入的内在几何信息, 采用CAP-UDF方法从点云中学习神经非负距离场(UDF) f u f_u fu,并通过梯度推理推导出点法线 N = N= N={ n i n_i ni} i = 1 N ^N_{i=1} i=1N:

采用2DGS作为表征方法:用二维定向的高斯圆盘替代三维高斯椭球体进行场景建模,在呈现局部精细几何结构方面展现出更优性能。2DGS通过圆盘方向直接编码法线信息,利用 场 f u f_u fu中的法线 n i n_i ni为每个高斯样本初始化旋转矩阵 r i r_i ri,确保每个二维高斯圆盘都能精准对齐正确方向,作为好的初始条件。
三.多视图修复和更新
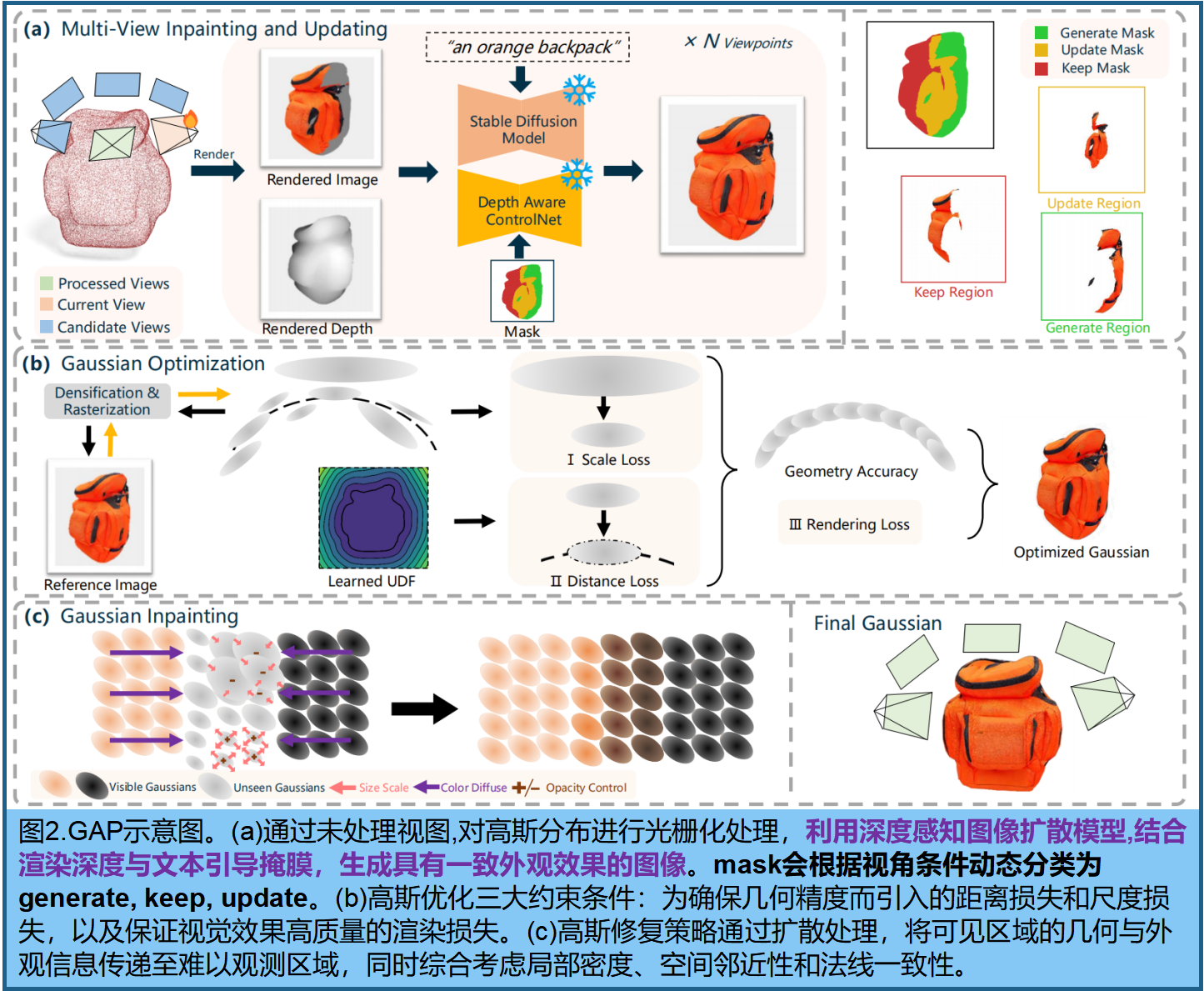
针对序列{ v j v_j vj} j = 1 k _{j=1}^k j=1k的每个视角,逐步生成该视角图像 I j I_j Ij,以优化相关高斯基元。基于学习到的UDF场,采用ray marching计算逐像素深度图 D j D_j Dj。如图2(a),渲染图像 I j I_j Ij,对应深度图 D j D_j Dj、mask M j M_j Mj及文本提示 c c c,共同输入深度感知修复模型。
深度感知修复模型(Depth-aware Inpainting Model) :作为外观生成模型,其将深度信息整合到基于扩散的修复过程中,生成更具几何一致性的图像。编码器** E E E的工作流程是:首先将掩膜图像 I I I与深度图 D D D拼接后输入编码器,生成潜在代码 z 0 z_0 z0**:

该过程通过一系列加噪操作逐步降解初始的潜在编码。在每个时间步t,模型根据由 β t β_t βt定义的方差调度添加高斯噪声。转换遵循概率分布:

其中 y y y是文本嵌入, g ϕ g_ϕ gϕ是处理图像深度输入的ControlNet。
为保持生成一致性,每个时间步会有mask blending:时间步 t t t处的潜在编码 z t z_t zt会根据mask M M M 与mask区域编码 z M , t z_{M,t} zM,t进行结合,来保留unmasked区域的内容:

Inpainting Updating Scheme :针对修复模型的不确定性(同一区域可能修复出不同的效果),设计了一套动态更新方案:当出现更理想的观察角度时,系统会优化已处理过的区域,即 根据当前视角 v j v_j vj的可见性,将 M M M划分为generate mask M g e n e r a t e M_{generate} Mgenerate, keep mask M k e e p M_{keep} Mkeep 和 update mask M u p d a t e M_{update} Mupdate。
M g e n e r a t e M_{generate} Mgenerate表示从未生成的空白区域; M k e e p M_{keep} Mkeep是已处理过的,且当前视角无法提供更佳的观察条件的区域; M u p d a t e M_{update} Mupdate根据视点方向与法线之间的相似度来判断是否刷新的区域。具体们定义了 M s i m i l a r i t y M_{similarity} Msimilarity来量化不同视角下表面细节的可观察性。对于视点 v j v_j vj,计算视点方向 d j d_j dj与点法线 N N N之间的余弦相似度得出: M s i m i l a r i t y = d j ⋅ N M_{similarity}= d_j·N Msimilarity=dj⋅N。当当前视角提供的观察角度,优于其他任何视角时,该区域就需要进行更新:

最终的修复图 I i n p a i n t I_{inpaint} Iinpaint通过两种不同的去噪处理生成的:对newly generated mask采用更强的去噪处理,而对update masks则采用较弱的去噪处理。最终效果的实现方式如下:

四.高斯优化
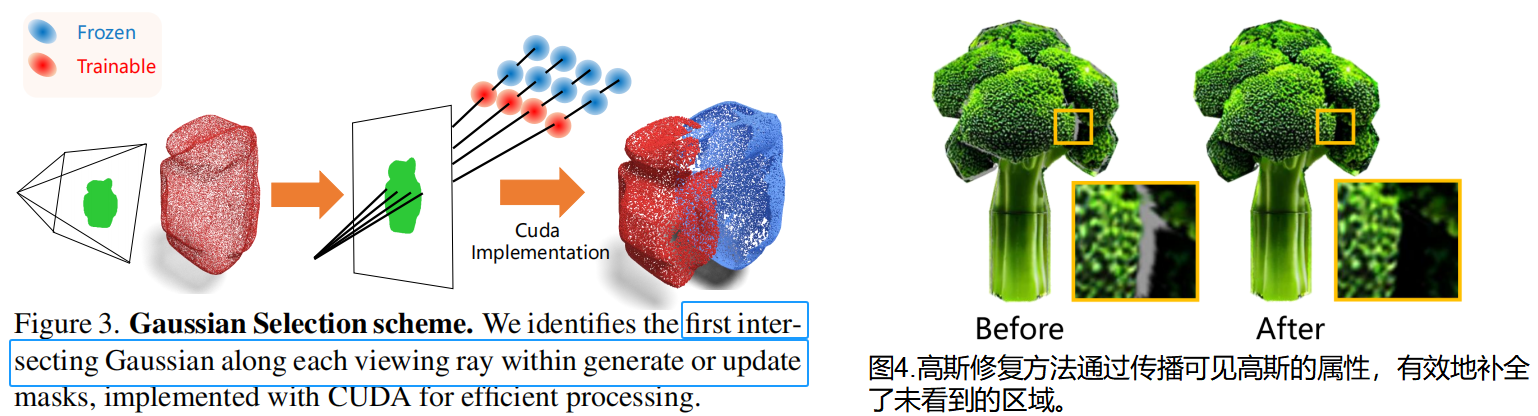
对于给定视角 v j v_j vj,通过修复模型生成外观 I j I_j Ij。高斯分布 G G G通过 I j I_j Ij进行优化 。与传统3DGS拟合方案需要跨多个视角多次迭代优化高斯属性不同, GAP方案每个视角仅需一次优化过程,从而生成更稳健的高斯分布,能够准确呈现高质量外观 I j I_j Ij。具体而言,在每个视角专属的优化步骤中,专注于优化当前视角下最近可见表面层对应的高斯分布,而不会修改背面表面的高斯分 布(如图3所示)。为此, 高斯选择方案:通过从generate或update mask内的像素出发,沿每条视线射线识别首个相交的高斯分布 。为应对处理大量射线的计算强度,我们开发了利用GPU并行性的CUDA 38实现方案,将高斯选择过程加速至仅需3秒。
整体损失:
L = L R e n d e r i n g + α L D i s t a n c e + β L S c a l e L=L_{Rendering}+αL_{Distance}+βL_{Scale} L=LRendering+αLDistance+βLScale
Surface-anchoring Mechanism 。在高斯优化过程中,偏离预期表面位置的高斯 分布会给多视角修复和模型更新带来重大挑战。这些高斯分布会在后续视角中产生错误的遮挡关系,导致distorted masks,并进一步降低生成和修复的质量。为此,基于距离损失的表面锚定机制,通过将高斯分布与学习到的无符号距离场zero-level set 对齐来实现 。具体而言,在优化过程中,我们会约束从 f u f_u fu查询到的每个高斯中心的距离值趋近于零:

尺度约束 。在从单一视角进行优化时,某些过度放大的高斯函数可能导致几何结构失真 ,进而影响后续视角的修复效果。尺度约束函数约束每个高斯 s i s_i si的最大值:

τ τ τ是预先定义的阈值,能有效防止高斯过度膨胀,同时仍保留足够的灵活性来模拟外观特征。
渲染约束 :

五、基于扩散的未见高斯修复
如图 2 ( c ) 2(c) 2(c),为重建未被观测区域的外观特征 ,提出了一种基于扩散高斯模型的修复方法。如图4所示,该方法能有效恢复最终表征中的缺失外观特征。我们的方案直接在三维空间进行修复操作,充分利用可见高斯分布的内在结构和空间关联性。通过多视角高斯选择方案,我们能够精准识别所有观测角度均未被优化的未观测高斯 G ′ = G'= G′={ g j ′ g'j gj′} j = 1 M ^M{j=1} j=1M。对于这些未观测高斯分布,其位置和法向量已通过第3.1节提出的高斯初始化方案完成预设,我们主要关注预测其剩余属性参数,包括颜色、尺度和透明度等关键特征。
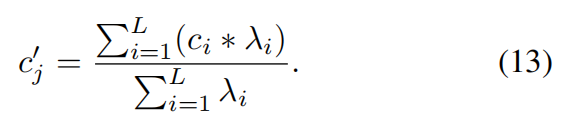
颜色扩散 。为预测未见区域的颜色属性,扩散机制通过传播邻近高斯分布的属性来实现 。对于每个未见高斯 g j ′ g_j' gj′,首先确定其最近的L个优化邻近高斯分布作为参考。加权策略:在颜色扩散过程中综合考虑空间邻近性、几何一致性及不透明度可靠性。设 o m a x o_{max} omax为所有邻近高斯分布中最大的不透明度值。对于未见高斯 g j ′ g_j' gj′的每个有效邻近高斯 g j g_j gj,其颜色权重 λ i λ_i λi计算:当gi与gj′的法线夹角小于60度(即 n i ⋅ n j n_i·n_j ni⋅nj>0.5)时,权重计算:

否则,权重将被设为0。距离项 1 / d i 1/d_i 1/di可防止外观不一致的远端高斯分布对颜色预测产生显著影响,发现一致项( n i ⋅ n j n_i·n_j ni⋅nj)通过优先考虑表面方向相似的高斯之间的颜色传播,从而保持几何特征。不透明度可靠项 o i / o m a x o_i/o_{max} oi/omax确保具有更高不透明度值的高斯分布对颜色预测具有更强的影响力。最后,未见过的高斯 g j ′ g_j' gj′的颜色 c j ′ c'_j cj′可表示为:
Size Scale .采用最近邻法(包括已优化和未见过的高斯)预测未见过的高斯分布 g j ′ g_j' gj′的合适尺度:根据这些邻近点的空间距离进行调整。未见的高斯分布的尺度 s j ′ s'_j sj′计算公式:

其中d表示未观测到的高斯分布gj′与其邻近分布gi之间的距离。我们引入了距离加权机制,因为较大的距离对应着需要更大尺度的稀疏区域。
Opacity Control .在预测未知高斯分布gj′的不透明度o′j时,我们采用基于密度的控制机制。半径ρ内的不透明度与局部高斯密度成反比。未知高斯分布 g j ′ g_j' gj′的不透明度 o j ′ o'_j oj′计算公式如下:

其中, o 0 o_0 o0是base不透明度值,P表示指定半径ρ内的高斯分布密度数量,P0为参考密度阈值。该不透明度控制方案通过降低高斯分布密度较高的区域不透明度值,既避免颜色过度堆积,又能确保表面覆盖度达标。
实验
1.文本驱动外观生成
数据集与指标。在Objaverse 12数据集的子集:包含225个类别的410个纹理模型,仅使用10万点的采样点云作为输入。采用三种互补评估指标:弗雷歇-Inception距离(FID)58和核Inception距离(KID×10−3)3用于图像质量评估,CLIP分数41用于文本-图像对齐度量。所有方法均采用相同的文本提示描述每个物体。所有物体均从固定视角以1024×1024像素的高分辨率进行渲染。
基线。在视觉效果方面,GAP对比的其他三维纹理生成方法:基于UV贴图的TexTure 42、Text2Tex 7、Paint3D 60和SyncMVD 30。这些方法均采用UV贴图技术。而Objaverse数据集子集中的原始网格包含艺术家创作的UV贴图。为确保在相同点云输入条件下公平比较,我们使用传统球枢算法(BPA)2和前沿学习方法CAP-UDF 68从输入点云重建网格,并通过xatlas 56unwrap生成UV贴图。
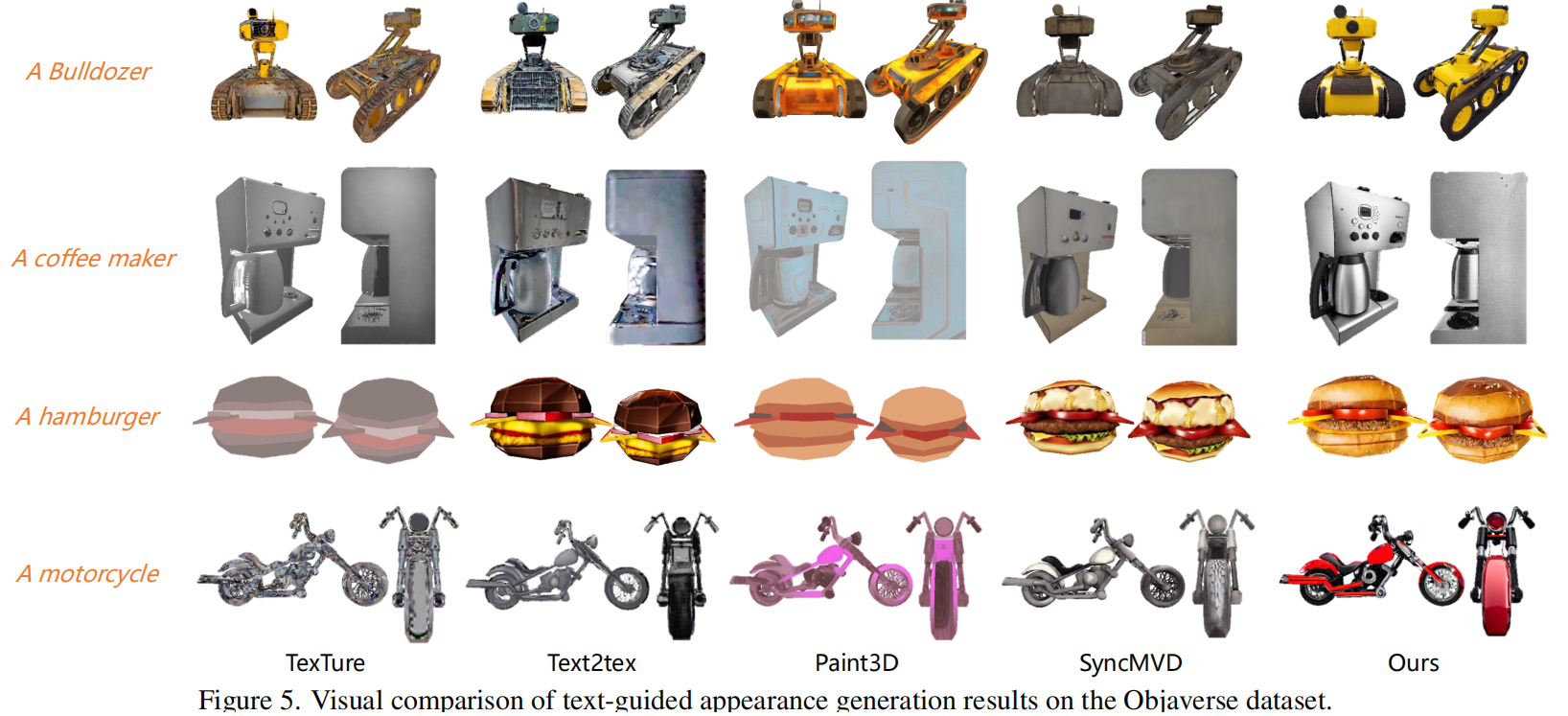
定量比较见表1,GAP采用高斯样条技术实现了本质上的更高渲染质量,优于使用重建网格的基准方法(存在拓扑结构模糊、连接错误和几何畸变等问题)。gap通过直接优化三维空间中的高斯基元来绕过UV参数化。如图5所示,虽然现有方法能生成看似合理的外观效果,但在细节保留方面存在明显短板。通过在三维空间中直接优化外观表现,gap在各类物体上均展现出更优的视觉品质。
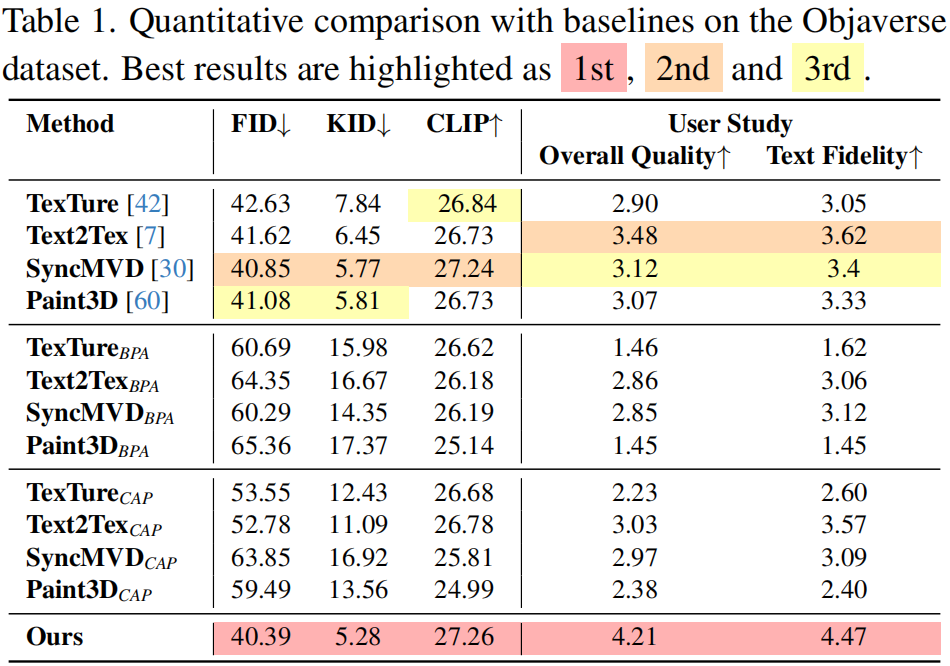
为了评估视觉外观和文本对齐,我们进行了一个有30名参与者的研究。每个参与者都独立地从多个角度评估了所有方法的结果,并根据1到5的评分标准进行打分.
2.点云到高斯的生成
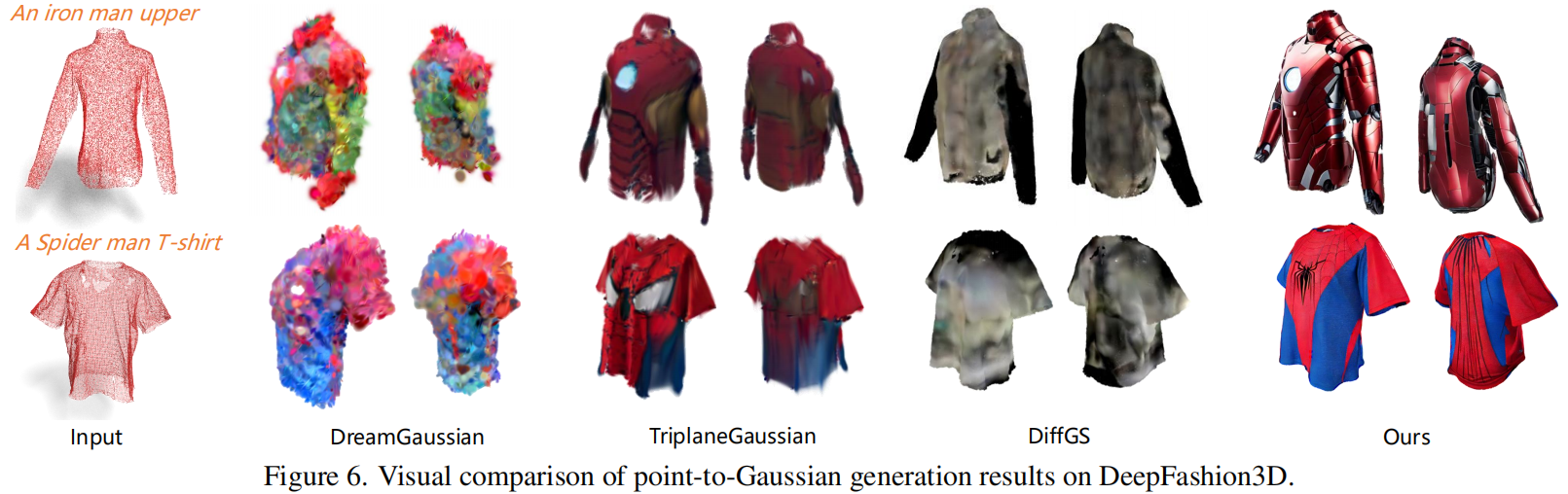
为评估GAP在点到高斯生成中的有效性,在两个数据集上开展实验:ShapeNet椅子类别6和DeepFashion3D 81。我们从每个3D模型中均匀采样10万个点来生成输入点云。GAP与三种前沿方法DreamGaussian 47、TriplaneGaussian 82和DiffGS 76进行对比,所有方法均使用相同的10万点云作为输入。
图6展示了与基线方法的视觉对比。相较于现有方法,GAP始终能生成更具视觉吸引力且几何精度更高的结果。基线方法存在若干关键缺陷:DreamGaussian 虽然采用了评分蒸馏采样(SDS)进行外观优化,但容易产生色彩不自然的过度饱和效果;其优化过程不仅计算量大,还对参数高度敏感。TriplaneGaussian和DiffGS则因受限于低分辨率三平面表征 ,难以有效捕捉外观细节。
3.扫描输入的高斯生成
#pic_center =80%x80%
d \sqrt{d} d 1 8 \frac {1}{8} 81 x ˉ \bar{x} xˉ D ^ \hat{D} D^ I ~ \tilde{I} I~ ϵ \epsilon ϵ
ϕ \phi ϕ ∏ \prod ∏ a b c \sqrt{abc} abc ∑ a b c \sum{abc} ∑abc
/ $$