基于 navmesh 的路径搜索技术剖析
这篇文章,将会讲解基于 navmesh 的路径搜索技术,可能有的同学第一次听说 navmesh,但是路径搜索肯定略有耳闻,以下举几个简单常见的例子。
- 游戏中,你点击任务列表的任务,系统将会自动将你的角色导航至任务地点。
- 王者荣耀的小地图里,点一个标记,系统将会操作你的角色以最优的路线移动至标记点。
这些都绕不开路径搜索,常见的路径搜索算法有 dijkstra 、aStar ,其中dijkstra基于图,路径搜索结果局限于图的边上 ,aStar基于网格,路径也规划在规则网格上
以上稍微拓展一下,现在回到这篇文章的主题。
什么是 navmesh ?
navmesh(navigation mesh) 也称 导航网格,这里的网格以三角网格为最小单元,路径搜索算法讲基于这个网格,也就是说,路径将在这个网格上。
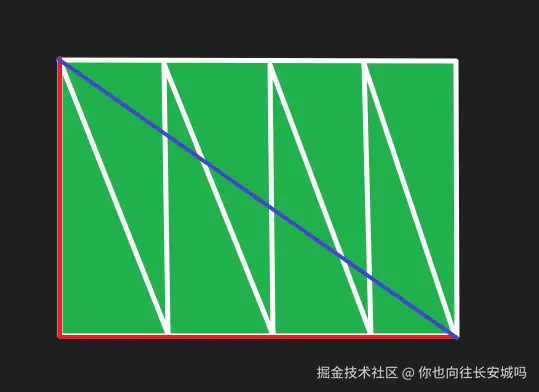
如下绿草地:其中每个三角形,都是最小的三角网格。其中红线为模拟dijkstra算法搜索得到的路径,蓝线为基于当前算法搜索得到的路径。
在大多数的自由的游戏场景下,我们需要得到的路径是蓝线路径,因为这更贴合实际。
如何基于 navmesh 实现路径搜索算法 ?
-
根据网格数据,构建连通图
以三角形为节点,构建整张图的数据结构
javascript// 两个节点的公共边 interface Portal { left:Vector3[], right:Vector3[] } // 节点 interface Node { neighbors:Node[], vertices:Vector3[], portals:Portal[], center:Vector3 } -
使用A*算法在连通图上搜索
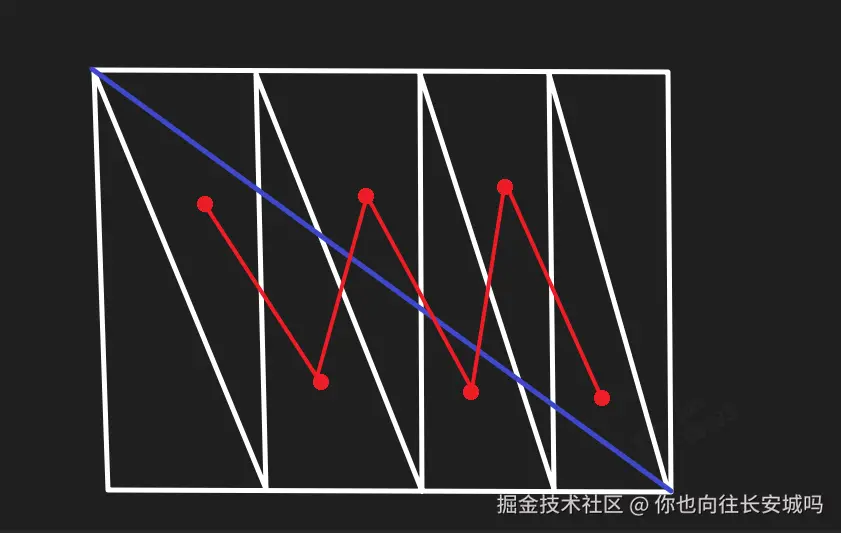
步骤一得到的图为三角形节点的连通图,基于 A* 算法搜索得到的路径为节点列表
Node[]javascript// 使用A*在三角节点的连通图上搜索,得到的路径为红色路径 const nodePath:Node[] = Astar.search(graph,start,end) // 根据节点路径计算得到路径通道,如下图绿色线条,为 NodeA=>NodeB 的必经通道 P const portals:Portal[] = findPortals(nodePath)
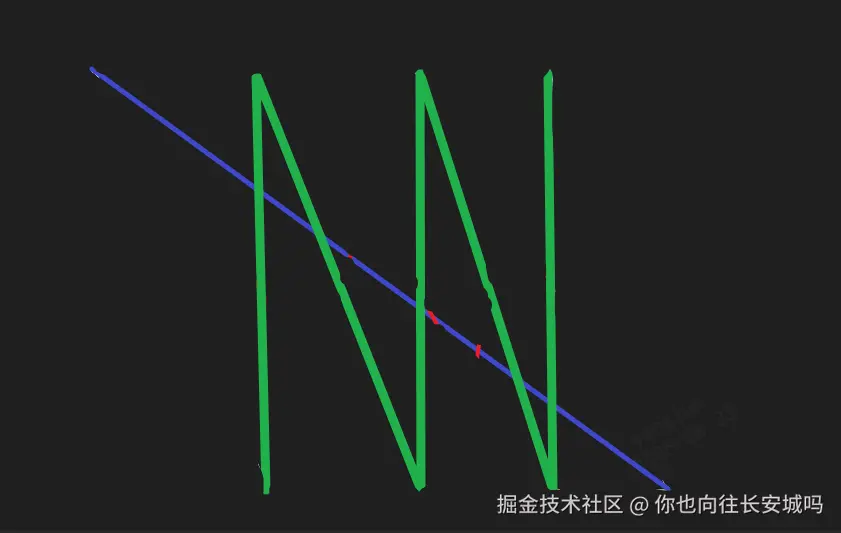
3. 使用漏斗算法生成最终路径
这篇博客对这个算法讲的比较详细 几何寻路:漏斗算法(Funnel Algorithm)-CSDN博客
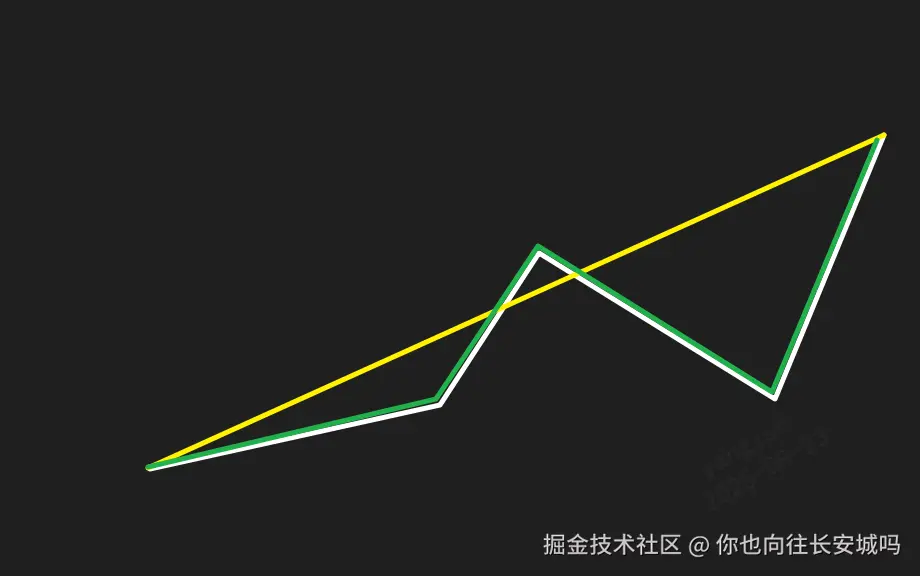
需要注意的是,在三维场景下,下图为截面图,黄色线为二维漏斗算法生成的路径,不考虑高度差。 与实际路径差距很大,绿色为我们需要的实际路径。黄色路线和绿色路线在俯视图均为直线。
在漏斗算法每一次插入节点的时机,需要对当前路径进行投影,计算是否存在高度差,如果存在,则需要将有高度差的节点依次加入到路径。
注意事项:
- 基于navmesh的路径搜索算法对三角形有要求,不规则的三角形搜索的路径不一定是最近的,因为A*算法执行依赖三角节点图。
- 高度,概念需要注意,三维世界中,需要确定代表高度的坐标轴,Y or Z ?
代码地址:
gitee:yangjun/three-pathfinding-3d