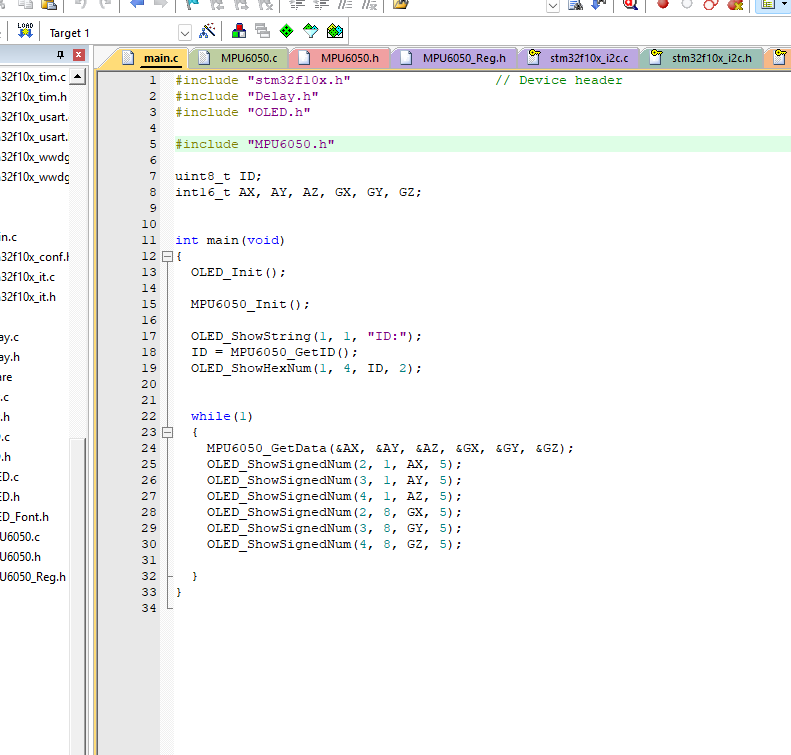
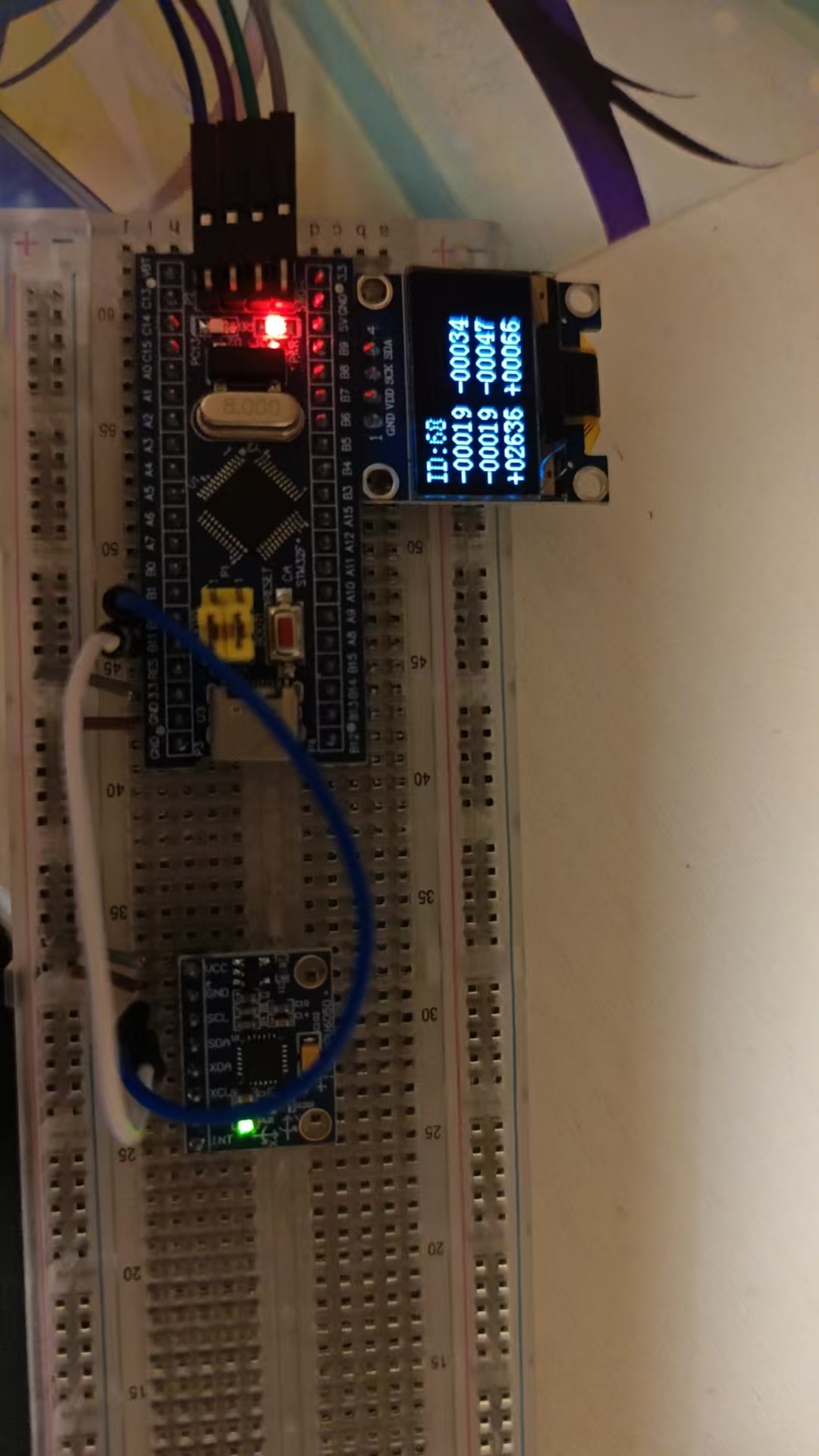
本文代码基于 STM32 单片机,通过 I2C 总线驱动 MPU6050 六轴传感器(集成加速度计与陀螺仪),实现传感器初始化、ID 读取、原始数据采集,并借助 OLED 显示屏实时展示加速度(AccX、AccY、AccZ)与角速度(GyroX、GyroY、GyroZ)信息,为姿态检测、运动监测等应用提供基础数据支撑。
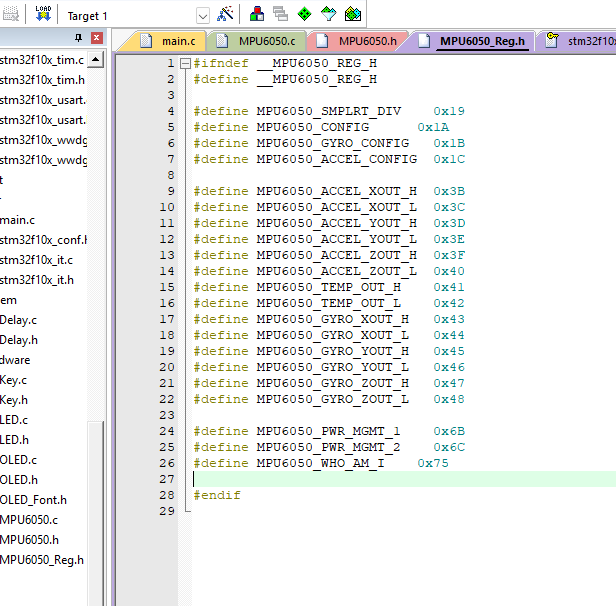
通过宏定义传感器内部寄存器地址,简化代码中寄存器操作,避免硬编码,提升可读性与可维护性。
写寄存器:
生成 I2C 起始信号,选择从机地址( MPU6050_ADDRESS )。
发送寄存器地址、写入数据,通过 MPU6050_WaitEvent 等待通信完成。
生成停止信号,完成写操作。
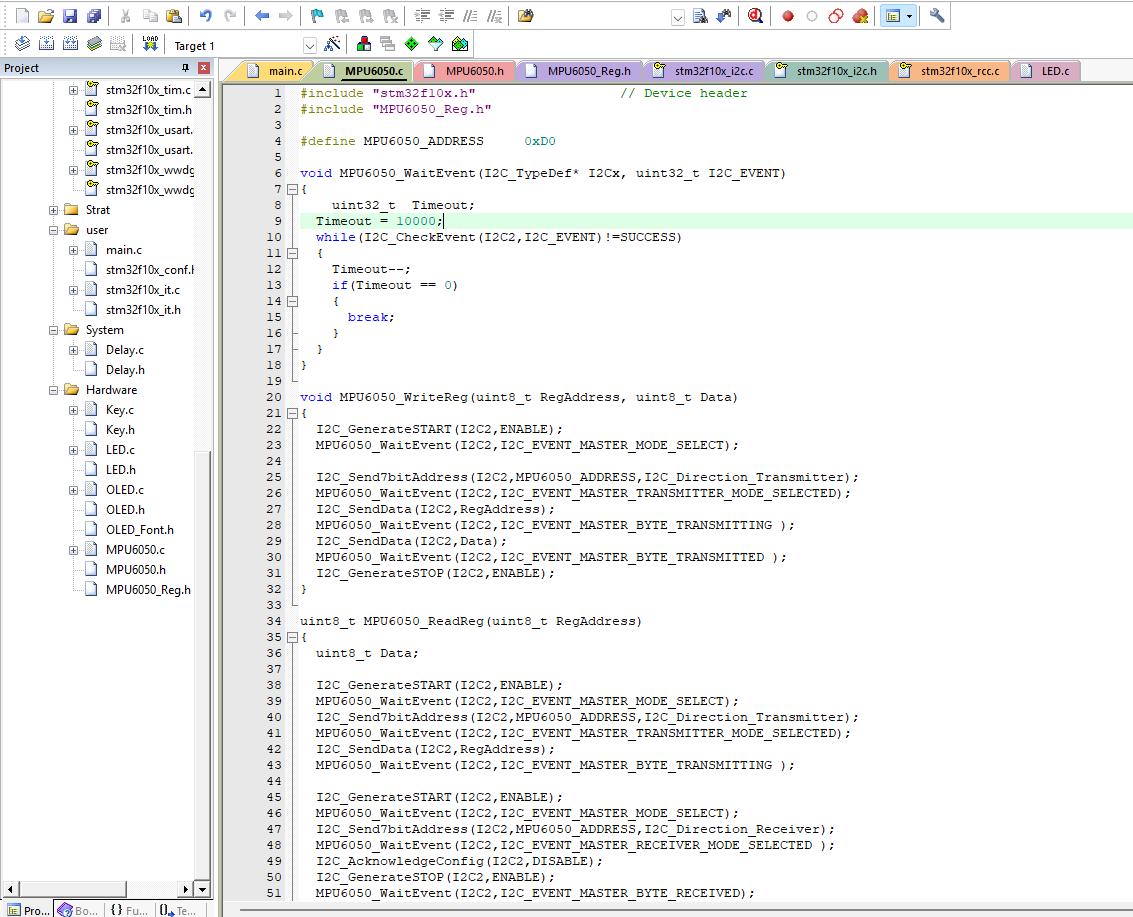
读寄存器:
先写操作发送寄存器地址(告知传感器要读取的数据位置)。
切换为读模式,再次生成起始信号,读取传感器返回数据。
禁用 ACK、生成停止信号,完成读操作。
初始化与数据采集:
使能 I2C 与 GPIO 时钟( RCC_APB1PeriphClockCmd ),配置 PB10/PB11 为 I2C 复用开漏模式。
初始化 I2C 外设(时钟、应答、地址模式等),设置传感器工作参数(如电源管理、采样率):
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); 唤醒传感器,选择时钟源
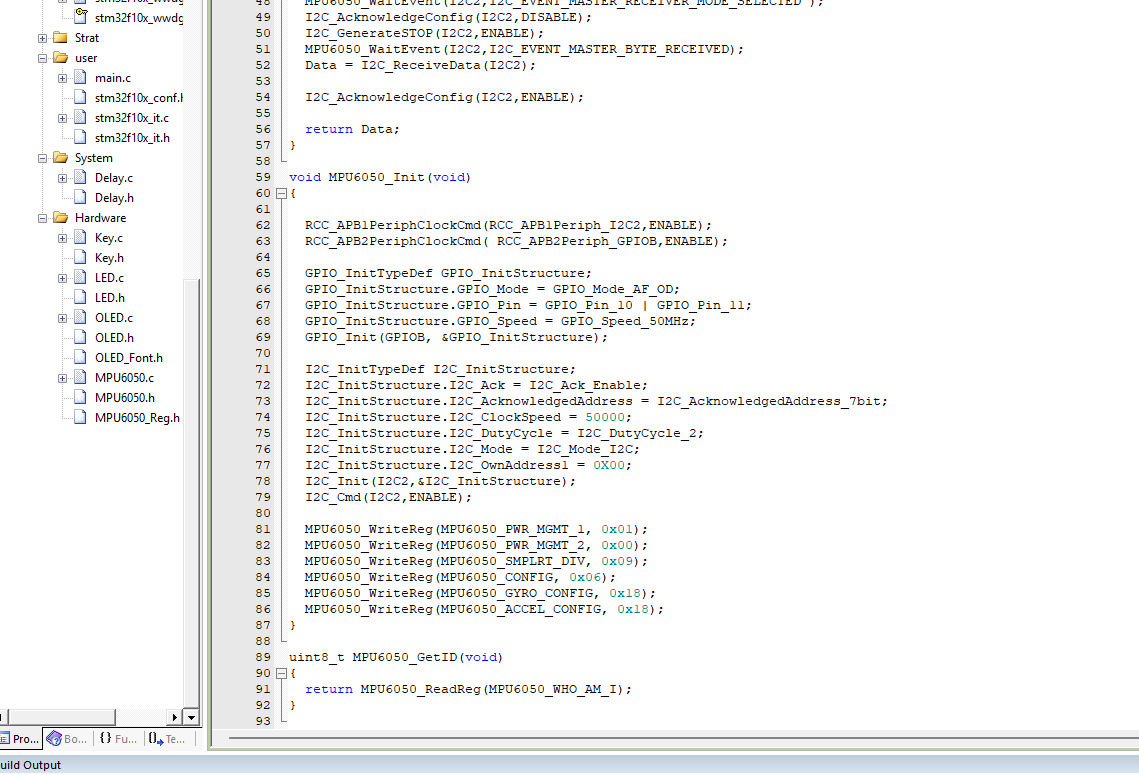
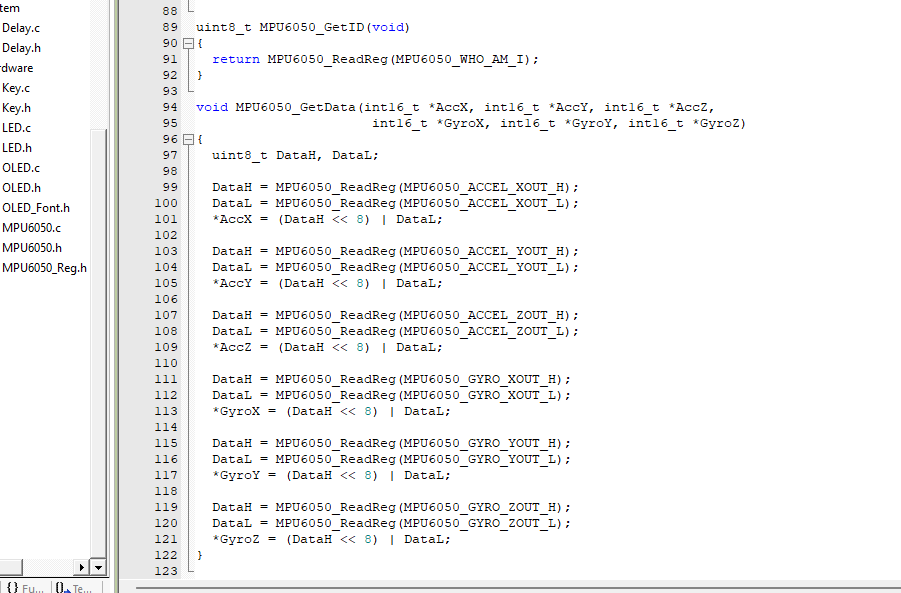
MPU6050_GetData :逐次读取加速度