文章目录
- 先言
- 一、梯度下降优化算法详解
- 二、梯度下降优化算法:从SGD到Adam
-
- 1.指数加权平均
- 2.动量梯度下降(Momentum)
- 3.学习率自适应算法(AdaGrad)
- [4.加权自适应学习率(AdaGrad )](#4.加权自适应学习率(AdaGrad ))
- [5.自适应动量算法(Adaptive Moment Estimation)](#5.自适应动量算法(Adaptive Moment Estimation))
- 三、神经网络数据集获取与处理
- 四、实战案例:CIFAR-10图像分类
- 结语
先言
在掌握了神经网络的基础架构后,如何让模型高效学习并达到优异性能成为了关键挑战。优化算法的选择、高质量数据集的获取,以及科学的训练技巧,共同决定了深度学习项目的成败。
本文将深入深度学习的实战环节:
✅ 梯度下降优化算法:从SGD到Adam的进化之路
✅ 神经网络数据集获取:公开数据集、自定义数据收集与处理
✅ 模型训练全流程:从数据加载到验证评估的完整Pipeline
✅ 实战技巧:学习率调度、早停机制、模型保存与加载
无论你是希望提升模型效果的研究者,还是准备开展实际项目的工程师,这篇文章都将为你提供系统性的实战指南!
一、梯度下降优化算法详解
1.批量梯度下降(BGD):稳定但计算成本高
Batch Gradient Descent BGD
特点:
- 每次更新参数时,使用整个训练集来计算梯度。
优点:
- 收敛稳定,能准确地沿着损失函数的真实梯度方向下降。
- 适用于小型数据集。
缺点:
-
对于大型数据集,计算量巨大,更新速度慢。
-
需要大量内存来存储整个数据集。
-
公式 :
θ = θ − α 1 m ∑ i = 1 m ∇ θ L ( y ^ ( i ) , y ( i ) ) \theta = \theta - \alpha \frac{1}{m} \sum_{i=1}^{m} \nabla_\theta L(\hat{y}^{(i)}, y^{(i)}) θ=θ−αm1i=1∑m∇θL(y^(i),y(i))其中, m m m 是训练集样本总数, x ( i ) , y ( i ) x^{(i)}, y^{(i)} x(i),y(i)是第 i i i 个样本及其标签, y ^ ( i ) \hat{y}^{(i)} y^(i)是第 i i i 个样本预测值。
例如,在训练集中有100个样本,迭代50轮。
那么在每一轮迭代中,都会一起使用这100个样本,计算整个训练集的梯度,并对模型更新。
所以总共会更新50次梯度。
因为每次迭代都会使用整个训练集计算梯度,所以这种方法可以得到准确的梯度方向。但如果数据集非常大,那么就导致每次迭代都很慢,计算成本就会很高。
示例代码如下:
python
#批量梯度下降
#计算量大,需要大量的内存支撑
def test01():
#样本
x = torch.randn(1000,10)
#标签
y = torch.randn(1000,1)
#神经网络模型
model = nn.Linear(10,1)
#批量梯度下降
dataset = TensorDataset(x,y)
dataloader = DataLoader(dataset,batch_size=len(dataset),shuffle=True)
criterion = nn.MSELoss()
opt = optim.SGD(model.parameters(),lr=0.01)
#训练批次
epochs = 20
for epoch in range(epochs):
for x,y in dataloader:
#前向传播
y_pred = model(x)
#计算损失
loss = criterion(y_pred,y)
#梯度清零
opt.zero_grad()
#反向传播
loss.backward()
#更新参数
opt.step()
print(f'第{epoch+1}次更新损失为:{loss.item()}')
print(f'{model.weight.tolist()}, {model.bias.item()}')
# test01()2.随机梯度下降(SGD):快速但震荡大
Stochastic Gradient Descent, SGD
特点:
- 每次更新参数时,仅使用一个样本来计算梯度。
优点:
- 更新频率高,计算快,适合大规模数据集。
- 能够跳出局部最小值,有助于找到全局最优解。
缺点:
- 收敛不稳定,容易震荡,因为每个样本的梯度可能都不完全代表整体方向。
- 需要较小的学习率来缓解震荡。
公式 :
θ = θ − α ∇ θ L ( y ^ ( i ) , y ( i ) ) \theta = \theta - \alpha \nabla_\theta L(\hat{y}^{(i)}, y^{(i)}) θ=θ−α∇θL(y^(i),y(i))
其中, x ( i ) , y ( i ) x^{(i)}, y^{(i)} x(i),y(i) 是当前随机抽取的样本及其标签。
例如,如果训练集有100个样本,迭代50轮,那么每一轮迭代,会遍历这100个样本,每次会计算某一个样本的梯度,然后更新模型参数。
换句话说,100个样本,迭代50轮,那么就会更新100*50=5000次梯度。
因为每次只用一个样本训练,所以迭代速度会非常快。
但更新的方向会不稳定,这也导致随机梯度下降,可能永远都不会收敛。不过也因为这种震荡属性,使得随机梯度下降,可以跳出局部最优解。这在某些情况下,是非常有用的。
示例代码如下:
python
#随机梯度下降
#收敛快,计算小,但是不稳定,容易震荡
def test03():
# 样本
x = torch.randn(1000, 10)
# 标签
y = torch.randn(1000, 1)
# 神经网络模型
model = nn.Linear(10, 1)
# 批量梯度下降
dataset = TensorDataset(x, y)
dataloader = DataLoader(dataset, batch_size=1, shuffle=True)
criterion = nn.MSELoss()
opt = optim.SGD(model.parameters(), lr=0.01)
# 训练批次
epochs = 20
for epoch in range(epochs):
for x, y in dataloader:
# 前向传播
y_pred = model(x)
# 计算损失
loss = criterion(y_pred, y)
# 梯度清零
opt.zero_grad()
# 反向传播
loss.backward()
# 更新参数
opt.step()
print(f'第{epoch + 1}次更新损失为:{loss.item()}')
print(f'{model.weight.tolist()}, {model.bias.item()}')
#test03()3.小批量梯度下降(MBGD):实践中的平衡选择
Mini-batch Gradient Descent MGBD
特点:
- 每次更新参数时,使用一小部分训练集(小批量)来计算梯度。
优点:
- 在计算效率和收敛稳定性之间取得平衡。
- 能够利用向量化加速计算,适合现代硬件(如GPU)。
缺点:
- 选择适当的批量大小比较困难;批量太小则接近SGD,批量太大则接近批量梯度下降。
- 通常会根据硬件算力设置为32\64\128\256等2的次方。
公式 :
θ : = θ − α 1 b ∑ i = 1 b ∇ θ L ( y ^ ( i ) , y ( i ) ) \theta := \theta - \alpha \frac{1}{b} \sum_{i=1}^{b} \nabla_\theta L(\hat{y}^{(i)}, y^{(i)}) θ:=θ−αb1i=1∑b∇θL(y^(i),y(i))
其中, b b b 是小批量的样本数量,也就是 b a t c h _ s i z e batch\_size batch_size。
例如,如果训练集中有100个样本,迭代50轮。
如果设置小批量的数量是20,那么在每一轮迭代中,会有5次小批量迭代。
换句话说,就是将100个样本分成5个小批量,每个小批量20个数据,每次迭代用一个小批量,因此,按照这样的方式,会对梯度,进行50轮*5个小批量=250次更新。
示例代码如下:
python
#小批量梯度下降
#计算速度和收敛稳定折中
#批量值选择问题:样本数量过多,计算速度慢,样本数量过少,训练效果不好
def test02():
# 样本
x = torch.randn(1000, 10)
# 标签
y = torch.randn(1000, 1)
# 神经网络模型
model = nn.Linear(10, 1)
# 批量梯度下降
dataset = TensorDataset(x, y)
dataloader = DataLoader(dataset, batch_size=32, shuffle=True)
criterion = nn.MSELoss()
opt = optim.SGD(model.parameters(), lr=0.01)
# 训练批次
epochs = 20
for epoch in range(epochs):
for x, y in dataloader:
# 前向传播
y_pred = model(x)
# 计算损失
loss = criterion(y_pred, y)
# 梯度清零
opt.zero_grad()
# 反向传播
loss.backward()
# 更新参数
opt.step()
print(f'第{epoch + 1}次更新损失为:{loss.item()}')
print(f'{model.weight.tolist()}, {model.bias.item()}')
# test02()二、梯度下降优化算法:从SGD到Adam
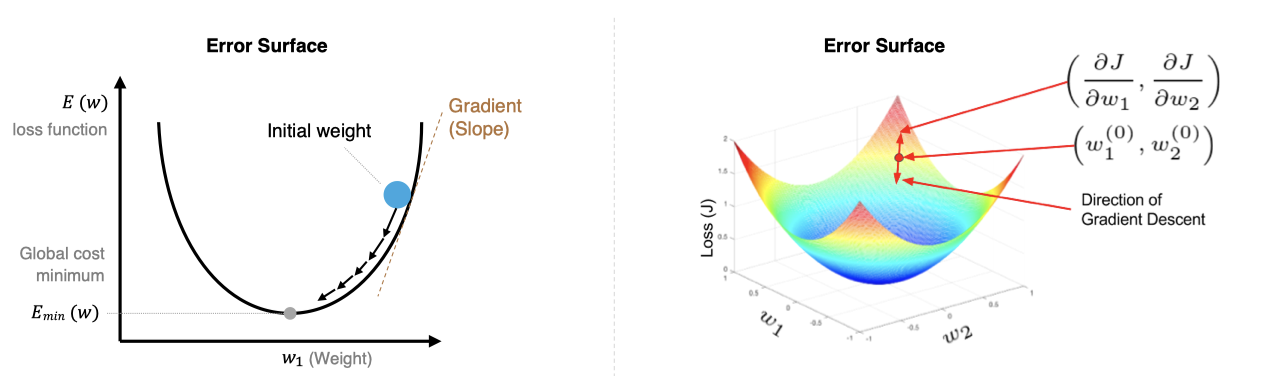
还记的我们在机器学习中知道:梯度下降算法的目标是找到使损失函数 L ( θ ) L(\theta) L(θ) 最小的参数 θ \theta θ,其核心是沿着损失函数梯度的负方向更新参数,以逐步逼近局部或全局最优解,从而使模型更好地拟合训练数据。同样在深度学习也是一样的任务和目标:
-
初始化参数 :随机初始化模型的参数 \\theta ,如权重 W W W和偏置 b b b。
-
计算梯度 :损失函数 L ( θ ) L(\theta) L(θ)对参数 θ \theta θ 的梯度 ∇ θ L ( θ ) \nabla_\theta L(\theta) ∇θL(θ),表示损失函数在参数空间的变化率。
-
更新参数 :按照梯度下降公式更新参数: θ : = θ − α ∇ θ L ( θ ) \theta := \theta - \alpha \nabla_\theta L(\theta) θ:=θ−α∇θL(θ),其中, α \alpha α 是学习率,用于控制更新步长。
-
迭代更新 :重复【计算梯度和更新参数】步骤,直到某个终止条件(如梯度接近0、不再收敛、完成迭代次数等)。
1.指数加权平均
指数加权平均:Exponential Moving Average,简称EMA,是一种平滑时间序列数据的技术,它通过对过去的值赋予不同的权重来计算平均值。与简单移动平均不同,EMA赋予最近的数据更高的权重,较远的数据则权重较低,这样可以更敏感地反映最新的变化趋势。
比如今天股市的走势,和昨天发生的国际事件关系很大,和6个月前发生的事件关系相对肯定小一些。
给定时间序列 { x t } \{x_t\} {xt},EMA在每个时刻 t t t 的值可以通过以下递推公式计算:
当 t = 1 t=1 t=1时:
v 0 = x 0 v_0 = x_0 v0=x0
当 t > 1 t>1 t>1时:
v t = β v t − 1 + ( 1 − β ) x t v_t = \beta v_{t-1} + (1 - \beta) x_t vt=βvt−1+(1−β)xt
其中:
- v t v_t vt 是第 t t t 时刻的EMA值;
- x t x_t xt 是第 t t t 时刻的观测值;
- β \beta β 是平滑系数,取值范围为 0 ≤ β < 1 0\leq \beta < 1 0≤β<1。 β \beta β 越接近 1 1 1,表示对历史数据依赖性越高;越接近 0 0 0 则越依赖当前数据。
公式推导:
v t = β v t − 1 + ( 1 − β ) x t v t − 1 = β v t − 2 + ( 1 − β ) x t − 1 . . . 那么: v t = β v t − 1 + ( 1 − β ) x t = β 2 v t − 2 + β ( 1 − β ) x t − 1 + ( 1 − β ) x t = β 3 v t − 3 + β 2 ( 1 − β ) x t − 2 + β ( 1 − β ) x t − 1 + ( 1 − β ) x t . . . = β t x 0 + β t − 1 ( 1 − β ) x 1 + β t − 2 ( 1 − β ) x 2 + . . . + ( 1 − β ) x t = β t x 0 + ( 1 − β ) Σ i = 1 n β t − i x i v_t = \beta v_{t-1} + (1 - \beta) x_t\\ v_{t-1} = \beta v_{t-2} + (1 - \beta) x_{t-1}\\ ...\\ 那么:\\ v_t = \beta v_{t-1} + (1 - \beta) x_t=\beta^2 v_{t-2} + \beta(1 - \beta) x_{t-1} + (1 - \beta) x_t\\ =\beta^3 v_{t-3} + \beta^2(1 - \beta) x_{t-2} + \beta(1 - \beta) x_{t-1} + (1 - \beta) x_t\\ ...\\ =\beta^t {x_0} + \beta^{t-1}(1 - \beta) x_{1} + \beta^{t-2}(1 - \beta) x_{2} + ... + (1 - \beta) x_t\\ =\beta^t {x_0} + (1 - \beta)\Sigma_{i=1}^n\beta^{t-i}x_i vt=βvt−1+(1−β)xtvt−1=βvt−2+(1−β)xt−1...那么:vt=βvt−1+(1−β)xt=β2vt−2+β(1−β)xt−1+(1−β)xt=β3vt−3+β2(1−β)xt−2+β(1−β)xt−1+(1−β)xt...=βtx0+βt−1(1−β)x1+βt−2(1−β)x2+...+(1−β)xt=βtx0+(1−β)Σi=1nβt−ixi
从上述公式可知:
- 当 β接近 1 时, β k β^k βk衰减较慢,因此历史数据的权重较高。
- 当 β接近 0 时, β k β^k βk衰减较快,因此历史数据的权重较低。
2.动量梯度下降(Momentum)
动量(Momentum)是对梯度下降的优化方法,可以更好地应对梯度变化和梯度消失问题,从而提高训练模型的效率和稳定性。它通过引入 指数加权平均 来积累历史梯度信息,从而在更新参数时形成"动量",帮助优化算法更快地越过局部最优或鞍点。
梯度更新算法包括两个步骤:
a. 更新动量项
首先计算当前的动量项 v t v_t vt: v t = β v t − 1 + ( 1 − β ) ∇ θ J ( θ t ) v_{t} = \beta v_{t-1} + (1 - \beta) \nabla_\theta J(\theta_t) vt=βvt−1+(1−β)∇θJ(θt) 其中:
- v t − 1 v_{t-1} vt−1 是之前的动量项;
- β \beta β 是动量系数(通常为 0.9);
- ∇ θ J ( θ t ) \nabla_\theta J(\theta_t) ∇θJ(θt) 是当前的梯度;
b. 更新参数
利用动量项更新参数:
v t = β v t − 1 + ( 1 − β ) ∇ θ J ( θ t ) θ t = θ t − 1 − η v t v_{t}=\beta v_{t-1}+(1-\beta)\nabla_\theta J(\theta_t) \\ \theta_{t}=\theta_{t-1}-\eta v_{t} vt=βvt−1+(1−β)∇θJ(θt)θt=θt−1−ηvt
特点:
-
惯性效应: 该方法加入前面梯度的累积,这种惯性使得算法沿着当前的方向继续更新。如遇到鞍点,也不会因梯度逼近零而停滞。
-
减少震荡: 该方法平滑了梯度更新,减少在鞍点附近的震荡,帮助优化过程稳定向前推进。
-
加速收敛: 该方法在优化过程中持续沿着某个方向前进,能够更快地穿越鞍点区域,避免在鞍点附近长时间停留。
Momentum 算法是对梯度值的平滑调整,但是并没有对梯度下降中的学习率进行优化。
3.学习率自适应算法(AdaGrad)
AdaGrad(Adaptive Gradient Algorithm)为每个参数引入独立的学习率,它根据历史梯度的平方和来调整这些学习率。具体来说,对于频繁更新的参数,其学习率会逐渐减小;而对于更新频率较低的参数,学习率会相对较大。AdaGrad避免了统一学习率的不足,更多用于处理稀疏数据和梯度变化较大的问题。
AdaGrad流程:
-
初始化:
- 初始化参数 θ 0 \theta_0 θ0 和学习率 η \eta η。
- 将梯度累积平方的向量 G 0 G_0 G0 初始化为零向量。
-
梯度计算:
- 在每个时间步 t t t,计算损失函数 J ( θ ) J(\theta) J(θ)对参数 θ \theta θ 的梯度 g t = ∇ θ J ( θ t ) g_t = \nabla_\theta J(\theta_t) gt=∇θJ(θt)。
-
累积梯度的平方:
-
对每个参数 i i i累积梯度的平方:
G t = G t − 1 + g t 2 G_{t} = G_{t-1} + g_{t}^2\\ Gt=Gt−1+gt2其中 G t G_{t} Gt 是累积的梯度平方和, g_{t} 是第 i i i个参数在时间步 t t t 的梯度。
推导:
G t = G t − 1 + g t 2 = G t − 2 + g t − 1 2 + g t 2 = . . . = g 1 2 + . . . + g t − 1 2 + g t 2 G_{t} = G_{t-1} + g_{t}^2=G_{t-2} + g_{t-1}^2 + g_{t}^2 = ... = g_{1}^2 + ... + g_{t-1}^2 + g_{t}^2 Gt=Gt−1+gt2=Gt−2+gt−12+gt2=...=g12+...+gt−12+gt2
-
-
参数更新:
-
利用累积的梯度平方来更新参数:
θ t = θ t − 1 − η G t + ϵ g t \theta_{t} = \theta_{t-1} - \frac{\eta}{\sqrt{G_{t} + \epsilon}} g_{t} θt=θt−1−Gt+ϵ ηgt -
其中:
- η \eta η 是全局的初始学习率。
- ϵ \epsilon ϵ 是一个非常小的常数,用于避免除零操作(通常取 10 − 8 10^{-8} 10−8)。
- η G t + ϵ \frac{\eta}{\sqrt{G_{t} + \epsilon}} Gt+ϵ η 是自适应调整后的学习率。
-
AdaGrad 为每个参数分配不同的学习率:
- 对于梯度较大的参数,Gt较大,学习率较小,从而避免更新过快。
- 对于梯度较小的参数,Gt较小,学习率较大,从而加快更新速度。
可以将 AdaGrad 类比为:
- 梯度较大的参数:类似于陡峭的山坡,需要较小的步长(学习率)以避免跨度过大。
- 梯度较小的参数:类似于平缓的山坡,可以采取较大的步长(学习率)以加快收敛。
优点:
- 自适应学习率:由于每个参数的学习率是基于其梯度的累积平方和 G t , i G_{t,i} Gt,i 来动态调整的,这意味着学习率会随着时间步的增加而减少,对梯度较大且变化频繁的方向非常有用,防止了梯度过大导致的震荡。
- 适合稀疏数据:AdaGrad 在处理稀疏数据时表现很好,因为它能够自适应地为那些较少更新的参数保持较大的学习率。
缺点:
- 学习率过度衰减:随着时间的推移,累积的时间步梯度平方值越来越大,导致学习率逐渐接近零,模型会停止学习。
- 不适合非稀疏数据:在非稀疏数据的情况下,学习率过快衰减可能导致优化过程早期停滞。
4.加权自适应学习率(AdaGrad )
虽然 AdaGrad 能够自适应地调整学习率,但随着训练进行,累积梯度平方 G t G_t Gt会不断增大,导致学习率逐渐减小,最终可能变得过小,导致训练停滞。
RMSProp(Root Mean Square Propagation)是一种自适应学习率的优化算法,在时间步中,不是简单地累积所有梯度平方和,而是使用指数加权平均来逐步衰减过时的梯度信息。旨在解决 AdaGrad 学习率单调递减的问题。它通过引入 指数加权平均 来累积历史梯度的平方,从而动态调整学习率。
公式为:
s t = β ⋅ s t − 1 + ( 1 − β ) ⋅ g t 2 θ t + 1 = θ t − η s t + ϵ ⋅ g t s_t=β⋅s_{t−1}+(1−β)⋅g_t^2\\θ_{t+1}=θ_t−\frac{η}{\sqrt{s_t+ϵ}}⋅gt st=β⋅st−1+(1−β)⋅gt2θt+1=θt−st+ϵ η⋅gt
其中:
- s t s_t st是当前时刻的指数加权平均梯度平方。
- β是衰减因子,通常取 0.9。
- η是初始学习率。
- ϵ是一个小常数(通常取 10 − 8 10^{−8} 10−8),用于防止除零。
- g t g_t gt是当前时刻的梯度。
优点
-
适应性强:RMSProp自适应调整每个参数的学习率,对于梯度变化较大的情况非常有效,使得优化过程更加平稳。
-
适合非稀疏数据:相比于AdaGrad,RMSProp更加适合处理非稀疏数据,因为它不会让学习率减小到几乎为零。
-
解决过度衰减问题:通过引入指数加权平均,RMSProp避免了AdaGrad中学习率过快衰减的问题,保持了学习率的稳定性
缺点
依赖于超参数的选择:RMSProp的效果对衰减率 γ \gamma γ 和学习率 η \eta η 的选择比较敏感,需要一些调参工作。
5.自适应动量算法(Adaptive Moment Estimation)
Adam(Adaptive Moment Estimation)算法将动量法和RMSProp的优点结合在一起:
- 动量法:通过一阶动量(即梯度的指数加权平均)来加速收敛,尤其是在有噪声或梯度稀疏的情况下。
- RMSProp:通过二阶动量(即梯度平方的指数加权平均)来调整学习率,使得每个参数的学习率适应其梯度的变化。
Adam过程
-
初始化:
- 初始化参数 θ 0 \theta_0 θ0 和学习率 η \eta η。
- 初始化一阶动量估计 m 0 = 0 m_0 = 0 m0=0 和二阶动量估计 v 0 = 0 v_0 = 0 v0=0。
- 设定动量项的衰减率 β 1 \beta_1 β1 和二阶动量项的衰减率 β 2 \beta_2 β2,通常 β 1 = 0.9 \beta_1 = 0.9 β1=0.9, β 2 = 0.999 \beta_2 = 0.999 β2=0.999。
- 设定一个小常数 ϵ \epsilon ϵ(通常取 10 − 8 10^{-8} 10−8),用于防止除零错误。
-
梯度计算:
- 在每个时间步 t t t,计算损失函数 J ( θ ) J(\theta) J(θ) 对参数 θ \theta θ 的梯度g_t = \\nabla_\\theta J(\\theta_t) 。
-
一阶动量估计(梯度的指数加权平均):
- 更新一阶动量估计:
m t = β 1 m t − 1 + ( 1 − β 1 ) g t m_t = \beta_1 m_{t-1} + (1 - \beta_1) g_t mt=β1mt−1+(1−β1)gt
其中, m t m_t mt 是当前时间步 t t t 的一阶动量估计,表示梯度的指数加权平均。
- 更新一阶动量估计:
-
二阶动量估计(梯度平方的指数加权平均):
- 更新二阶动量估计:
v t = β 2 v t − 1 + ( 1 − β 2 ) g t 2 v_t = \beta_2 v_{t-1} + (1 - \beta_2) g_t^2 vt=β2vt−1+(1−β2)gt2
其中, v t v_t vt 是当前时间步 t t t 的二阶动量估计,表示梯度平方的指数加权平均。
- 更新二阶动量估计:
-
偏差校正:
由于一阶动量和二阶动量在初始阶段可能会有偏差,以二阶动量为例:
在计算指数加权平均时,初始化 v 0 = 0 v_{0}=0 v0=0,那么 v 1 = 0.999 ⋅ v 0 + 0.001 ⋅ g 1 2 v_{1}=0.999\cdot v_{0}+0.001\cdot g_{1}^2 v1=0.999⋅v0+0.001⋅g12,得到 v 1 = 0.001 ⋅ g 1 2 v_{1}=0.001\cdot g_{1}^2 v1=0.001⋅g12,显然得到的 v 1 v_{1} v1 会小很多,导致估计的不准确,以此类推:
根据: v 2 = 0.999 ⋅ v 1 + 0.001 ⋅ g 2 2 v_{2}=0.999\cdot v_{1}+0.001\cdot g_{2}^2 v2=0.999⋅v1+0.001⋅g22,把 v 1 v_{1} v1 带入后,
得到: v 2 = 0.999 ⋅ 0.001 ⋅ g 1 2 + 0.001 ⋅ g 2 2 v_{2}=0.999\cdot 0.001\cdot g_{1}^2+0.001\cdot g_{2}^2 v2=0.999⋅0.001⋅g12+0.001⋅g22,导致 v 2 v_{2} v2 远小于 g 1 g_{1} g1 和 g 2 g_{2} g2,所以 v 2 v_{2} v2 并不能很好的估计出前两次训练的梯度。
所以这个估计是有偏差的。
使用以下公式进行偏差校正:
m ^ t = m t 1 − β 1 t v ^ t = v t 1 − β 2 t \hat{m}_t = \frac{m_t}{1 - \beta_1^t} \\ \hat{v}_t = \frac{v_t}{1 - \beta_2^t} m^t=1−β1tmtv^t=1−β2tvt其中, m ^ t \hat{m}_t m^t 和 v ^ t \hat{v}_t v^t 是校正后的一阶和二阶动量估计。
三、神经网络数据集获取与处理
1.数据加载与数据增强
数据加载:
数据加载器DataLoader 是一个迭代器,用于从 Dataset 中批量加载数据。它的主要功能包括:
- 批量加载:将多个样本组合成一个批次。
- 打乱数据:在每个 epoch 中随机打乱数据顺序。
- 多线程加载:使用多线程加速数据加载。
创建DataLoader并获取:
python
from torchvision import datasets
import torch.nn as nn
import torch
from torch.utils.data import DataLoader
#获取训练数据集
dataset = datasets.ImageFolder(root="./data", train=True, download=True)
# 创建 DataLoader
dataloader = DataLoader(
dataset, # 数据集
batch_size=10, # 批量大小
shuffle=True, # 是否打乱数据
num_workers=2 # 使用 2 个子进程加载数据
)
# 遍历 DataLoader
# enumerate返回一个枚举对象(iterator),生成由索引和值组成的元组
for batch_idx, (samples, labels) in enumerate(dataloader):
print(f"Batch {batch_idx}:")
print("Samples:", samples)
print("Labels:", labels)数据增强:
数据增强(Data Augmentation)是一种通过人工生成或修改训练数据来增加数据集多样性的技术,常用于解决过拟合问题。数据增强通过"模拟"更多训练数据,迫使模型学习泛化性更强的规律,而非训练集中的偶然性模式。其本质是一种低成本的正则化手段,尤其在数据稀缺时效果显著。
在了解计算机如何处理图像之前,需要先了解图像的构成元素。
图像是由像素点组成的,每个像素点的值范围为: 0, 255, 像素值越大意味着较亮。比如一张 200x200 的图像, 则是由 40000 个像素点组成, 如果每个像素点都是 0 的话, 意味着这是一张全黑的图像。
我们看到的彩色图一般都是多通道的图像, 所谓多通道可以理解为图像由多个不同的图像层叠加而成, 例如我们看到的彩色图像一般都是由 RGB 三个通道组成的,还有一些图像具有 RGBA 四个通道,最后一个通道为透明通道,该值越小,则图像越透明。
数据增强是提高模型泛化能力(鲁棒性)的一种有效方法,尤其在图像分类、目标检测等任务中。数据增强可以模拟更多的训练样本,从而减少过拟合风险。数据增强通过torchvision.transforms模块来实现。
数据增强的好处
大幅度降低数据采集和标注成本;
模型过拟合风险降低,提高模型泛化能力;
常用变换类
- transforms.Compose:将多个变换操作组合成一个流水线。
- transforms.ToTensor:将 PIL 图像或 NumPy 数组转换为 PyTorch 张量,将图像数据从 uint8 类型 (0-255) 转换为 float32 类型 (0.0-1.0)。
- transforms.Normalize:对张量进行标准化。
- transforms.Resize:调整图像大小。
- transforms.CenterCrop:从图像中心裁剪指定大小的区域。
- transforms.RandomCrop:随机裁剪图像。
- transforms.RandomHorizontalFlip:随机水平翻转图像。
- transforms.RandomVerticalFlip:随机垂直翻转图像。
- transforms.RandomRotation:随机旋转图像。
- transforms.ColorJitter:随机调整图像的亮度、对比度、饱和度和色调。
- transforms.RandomGrayscale:随机将图像转换为灰度图像。
- transforms.RandomResizedCrop:随机裁剪图像并调整大小。
代码示例:
python
from torchvision import datasets,transforms
import torch.nn as nn
import torch
from torch.utils.data import DataLoader
#创建transforms对象实例
transform = transforms.Compose([
#数据增强的一系列操作
transforms.ToTensor(),
#随机旋转
transforms.RandomRotation(30),
#模糊
transforms.GaussianBlur(3, sigma=(0.1, 2.0)),
#随机翻转
transforms.RandomHorizontalFlip(),
#缩放
transforms.Resize((224, 224)),
transforms.RandomResizedCrop(224, scale=(0.8, 1.0)),
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2),
transforms.RandomAffine(degrees=0, translate=(0.1, 0.1)), # 随机平移
transforms.RandomGrayscale(p=0.1), # 随机灰度化
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
#加载相对目录data下的文件
trainset = datasets.ImageFolder(root="./data", train=True, download=True, transform=transform)
dataloader = DataLoader(trainset, batch_size=4, shuffle=False)
# 遍历获取每一个批次的数据
for data,target in dataloader:
print(data.shape)
print(target.shape) 2.公开数据集资源
2.1获取MNIST数据集
在获取数据集之前先创建一个数据集目录(这里创建名为dataset)用于存放获取的数据集包之后通过datasets的类方法获取相应的数据集,示例代码如下:
python
import torch
from torch import nn
from torchvision import transforms,datasets
#数据装tensor方法封装
transform = transforms.Compose([
transforms.ToTensor()
])
#获取训练数据集
train_dataset= datasets.MNIST(
'./datasets',
train=True,
download=True,
transform=transform
)
#获取测试数据集
eval_dataset = datasets.MNIST(
'./datasets',
train=False,
download=True,
transform=transform
)2.2获取CIFAR10数据集
同MNIST数据集一样,本地目录没有数据会重新下载在指定目录下,示例如下:
python
import torch
from torch import nn
from torchvision import transforms,datasets
from PIL import Image
from torch.utils.data import DataLoader
def build_data():
#创建transforms对象
transform = transforms.Compose([
transforms.ToTensor()
])
#获取数据集
train_dataset= datasets.CIFAR10(
'./datasets',
train=True,
download=True,
transform=transform
)
eval_dataset = datasets.CIFAR10(
'./datasets',
train=False,
download=True,
transform=transform
)
#dataloader分离特征和标签
train_loader = DataLoader(train_dataset,batch_size=128,shuffle=True)
eval_loader = DataLoader(eval_dataset,batch_size=len(eval_dataset),shuffle=True)
return train_loader,eval_loader3.自定义数据集资源
3.1手动添加数据数据源
一开始的数据手动进行分类(不同类的图像文件放在名为类别的目录)就存放在data目录下,可以直接用ImageFolder内置方法直接读取
python
trainset = datasets.ImageFolder(root="./data", train=True, download=True, transform=transform)
dataloader = DataLoader(trainset, batch_size=4, shuffle=False)3.2通过爬虫爬取网页数据作为数据源
爬虫读取后存放数据的格式要满足如下格式要求:
python
data/
├── train/
│ ├── beagle/
│ │ ├── img1.jpg
│ │ └── ...
│ ├── chihuahua/
│ │ └── ...
│ └── ...
└── val/
├── beagle/
│ ├── img5.jpg
│ └── ...
├── chihuahua/
│ └── ...
└── ...这里以百度图片获取猫狗分类数据集为例,代码如下:
python
import os.path
import requests
import json
#分类
category = {
"cat": "猫",
"dog": "狗"
}
basepath = os.path.dirname(__file__)
Page_sum=5
if __name__ == '__main__':
for k,word in category.items():
folder = os.path.join(basepath,k)
if not os.path.exists(folder):
os.mkdir(folder)
for page in range(Page_sum):
url = f'https://image.baidu.com/search/acjson?tn=resultjson_com&word={word}&ie=utf-8&fp=result&fr=&ala=0&applid=9065640523184652929&pn={30*page}&rn=30&nojc=0&gsm=12c&newReq=1'
headers = {
'User-Agent': 'Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/138.0.0.0 Safari/537.36 Edg/138.0.0.0'
}
response = requests.get(url,headers=headers)
images = response.json().get('data').get('images')
print(images)
imagelist=[]
for image in images:
imagelist.append(image.get('thumburl','None'))
for index,img in enumerate(imagelist):
imgdata = requests.get(img).content
with open(os.path.join(folder,f'{k}_{page*30+index+1}.jpg'),'wb') as f:
f.write(imgdata)
print(f'关键词:{word} → {k}_{(page * 30 + index)+1}.jpg 保存成功......')通过上述操作可以得到两个名分别为cat何dog的目录文件,将他们存放在data目录下,通过前一小节方式通过ImageFolder方法读取训练数据集。
四、实战案例:CIFAR-10图像分类
1.获取数据并进行数据增强和划分
代码示例:
python
def build_data():
#创建transforms对象
transform = transforms.Compose([
transforms.ToTensor()
])
#获取数据集
train_dataset= datasets.CIFAR10(
'./datasets',
train=True,
download=True,
transform=transform
)
eval_dataset = datasets.CIFAR10(
'./datasets',
train=False,
download=True,
transform=transform
)
#dataloader分离特征和标签
train_loader = DataLoader(train_dataset,batch_size=128,shuffle=True)
eval_loader = DataLoader(eval_dataset,batch_size=len(eval_dataset),shuffle=True)
return train_loader,eval_loader#返回的是训练集和测试集2.构建网络模型
示例如下:
python
#构建全连接神经网络结构
class MyNet(nn.Module):
def __init__(self,in_features,out_features):
super().__init__()
self.fc1 = nn.Linear(in_features, 1024)
self.bn1 = nn.BatchNorm1d(1024)
self.fc2 = nn.Linear(1024, 512)
self.bn2 = nn.BatchNorm1d(512)
self.fc3 = nn.Linear(512, 256)
self.bn3 = nn.BatchNorm1d(256)
self.fc4 = nn.Linear(256, 64)
self.bn4 = nn.BatchNorm1d(64)
self.fc5 = nn.Linear(64, out_features)
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.1)
def forward(self, x):
x = x.view(-1, 32 * 32 * 3)
x = self.relu(self.bn1(self.fc1(x)))
# x= self.dropout(x)
x = self.relu(self.bn2(self.fc2(x)))
x = self.relu(self.bn3(self.fc3(x)))
x = self.relu(self.bn4(self.fc4(x)))
x = self.fc5(x)
return x3.创建训练函数
示例如下:
python
def train(model,train_loader,lr,epochs):
model.train()
criterion = nn.CrossEntropyLoss()
#添加正则化系数XX
opt = torch.optim.SGD(model.parameters(),lr=lr)
for epoch in range(epochs):
correct = 0
#小批量训练
for x_train,y_train in train_loader:
y_pred = model(x_train)
loss = criterion(y_pred,y_train)
opt.zero_grad()
loss.backward()
opt.step()
_,index = torch.max(y_pred,dim=1)
correct+= (index==y_train).sum().item()
correct/=len(train_loader.dataset)
print(f'第{epoch+1}次更新损失为:{loss.item()}, 准确率为:{correct}')
return loss.item()4.创建测试函数
示例如下:
python
def eval(model,eval_loader):
model.eval()
correct = 0
with torch.no_grad():
for x_test,y_test in eval_loader:
y_pred = model(x_test)
_,index = torch.max(y_pred,dim=1)
correct += (index==y_test).sum().item()
acc = correct/len(eval_loader.dataset)
print(f'测试集预测结果准确率为:{acc}')5.模型的保存和应用
python
def save():
model = MyNet()
torch.save(model.state_dict(),'./model/cifar10_model_params.pt')
def load(modelpath):
model = MyNet()
model.load_state_dict(torch.load(modelpath))
return model6.应用模型进行图像预测
python
def predict(model,image_path):
model.eval()
image = Image.open(image_path)
transform = transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
])
image = transform(image).unsqueeze(0)
with torch.no_grad():
y_pred = model(image)
_,index = torch.max(y_pred,dim=1)
class_names = ['airplane','automobile','bird','cat','deer','dog','frog','horse','ship','truck']
print(f'预测结果为:{index.item()},该图中为:{class_names[index.item()]}')7.完整代码
python
import torch
from torch import nn
from torchvision import transforms,datasets
from PIL import Image
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader
def build_data():
#创建transforms对象
transform = transforms.Compose([
transforms.ToTensor()
])
#获取数据集
train_dataset= datasets.CIFAR10(
'./datasets',
train=True,
download=True,
transform=transform
)
eval_dataset = datasets.CIFAR10(
'./datasets',
train=False,
download=True,
transform=transform
)
#dataloader分离特征和标签
train_loader = DataLoader(train_dataset,batch_size=128,shuffle=True)
eval_loader = DataLoader(eval_dataset,batch_size=len(eval_dataset),shuffle=True)
return train_loader,eval_loader
#构建全连接神经网络结构
class MyNet(nn.Module):
def __init__(self,in_features,out_features):
super().__init__()
self.fc1 = nn.Linear(in_features, 1024)
self.bn1 = nn.BatchNorm1d(1024)
self.fc2 = nn.Linear(1024, 512)
self.bn2 = nn.BatchNorm1d(512)
self.fc3 = nn.Linear(512, 256)
self.bn3 = nn.BatchNorm1d(256)
self.fc4 = nn.Linear(256, 64)
self.bn4 = nn.BatchNorm1d(64)
self.fc5 = nn.Linear(64, out_features)
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.1)
def forward(self, x):
x = x.view(-1, 32 * 32 * 3)
x = self.relu(self.bn1(self.fc1(x)))
# x= self.dropout(x)
x = self.relu(self.bn2(self.fc2(x)))
x = self.relu(self.bn3(self.fc3(x)))
x = self.relu(self.bn4(self.fc4(x)))
x = self.fc5(x)
return x
def train(model,train_loader,lr,epochs):
model.train()
criterion = nn.CrossEntropyLoss()
#添加正则化系数XX
opt = torch.optim.SGD(model.parameters(),lr=lr)
for epoch in range(epochs):
correct = 0
#小批量训练
for x_train,y_train in train_loader:
y_pred = model(x_train)
loss = criterion(y_pred,y_train)
opt.zero_grad()
loss.backward()
opt.step()
_,index = torch.max(y_pred,dim=1)
correct+= (index==y_train).sum().item()
correct/=len(train_loader.dataset)
print(f'第{epoch+1}次更新损失为:{loss.item()}, 准确率为:{correct}')
return loss.item()
def eval(model,eval_loader):
model.eval()
correct = 0
with torch.no_grad():
for x_test,y_test in eval_loader:
y_pred = model(x_test)
_,index = torch.max(y_pred,dim=1)
correct += (index==y_test).sum().item()
acc = correct/len(eval_loader.dataset)
print(f'测试集预测结果准确率为:{acc}')
def save():
model = MyNet()
torch.save(model.state_dict(),'./model/cifar10_model_params.pt')
def load(modelpath):
model = MyNet()
model.load_state_dict(torch.load(modelpath))
return model
def predict(model,image_path):
model.eval()
image = Image.open(image_path)
transform = transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
])
image = transform(image).unsqueeze(0)
with torch.no_grad():
y_pred = model(image)
_,index = torch.max(y_pred,dim=1)
class_names = ['airplane','automobile','bird','cat','deer','dog','frog','horse','ship','truck']
print(f'预测结果为:{index.item()},该图中为:{class_names[index.item()]}')
if __name__ == '__main__':
train_loader,eval_loader = build_data()
model = MyNet() #模型初始化
# train(model,train_loader,0.01,20)
# save()
#这里的模型已经进过训练直接通过参数字典拿来用,不过需要进过初始化
model = load('./model/cifar10_model_params.pt')
eval(model, eval_loader)
image_path = './image/100.jpg'
predict(model,image_path)通过训练得知图像对于三通道的有色图像进行预测的准确度比较低,捅咕部分优化手段任然处在不理想的结果,这是正常现象
单纯的全连接网络模型对于图像的预测能力是有缺陷的,在网络结构中对图像数据进行前向传播时,图像的像素特征被映射为一个一维向量,因此图像的空间特征结构收到损坏,模型无法的到真实的图像特征或是特征不完全,所以在下一章节我们将用到卷积核的方式对图像进行特征提取,也就是卷积神经网络,它对我们的图像进行分类有意想不到的效果。
结语
掌握优化算法的原理、熟练获取和处理数据、构建高效的训练流程,是成为深度学习实践者的必备技能。本文从理论到代码实战,为你提供了完整的深度学习项目指南。
🔧 动手实践:文中包含可运行的代码示例,建议在Colab或本地环境中亲自尝试!你在模型训练中遇到过哪些挑战?欢迎在评论区分享交流!
📌 下篇预告:《卷积神经网络实战:从LeNet到EfficientNet的图像分类全解析》