这篇博客是我们开源的一个项目介绍,包括3D结构件 STP 文件与常见 SLAM 工程在 Arm 设备上编译手册等,将 Livox Mid360、Realsense 相机、Nvidia Jetson Orin、定制电池放在了一个手持设备上,同时这个手持设备预留了底部螺纹孔,当你以手持模式使用完成后可以将其直接固定到机器人本体上(如移动小车),例如用手持模式完成地图扫描,接上显示器处理地图,然后再将整个设备作为移动小车的计算感知单元。
如果你想更换 RealSense 相机并使用其他视觉传感器,也仅需自己打印一个结构件即可;得益于模块化设计,你甚至可以为雷达重新添加一个倾斜底座以便在车载模式下获取地面点云;
项目已经完全开源,这篇博客的剩余部分将直接复制项目中的 ReadMe 文件内容,如果你感觉这个项目对你有帮助的话,可以在 Github 上贡献 Star ,这会激励我们在 Arm 上展开更深入的研究并加速开源步伐;
- JLV-handhold:https://github.com/GaohaoZhou-ops/JLV-handhold#
【注意】:因平台审核原因,物料清单部分内容无法展示,感兴趣的可以直接访问我们的仓库,里面有所有详细信息。
JLV-handhold: Jetson Lidar and Vision for Robotics and Embodied
| Stp View | Real View |
|---|---|
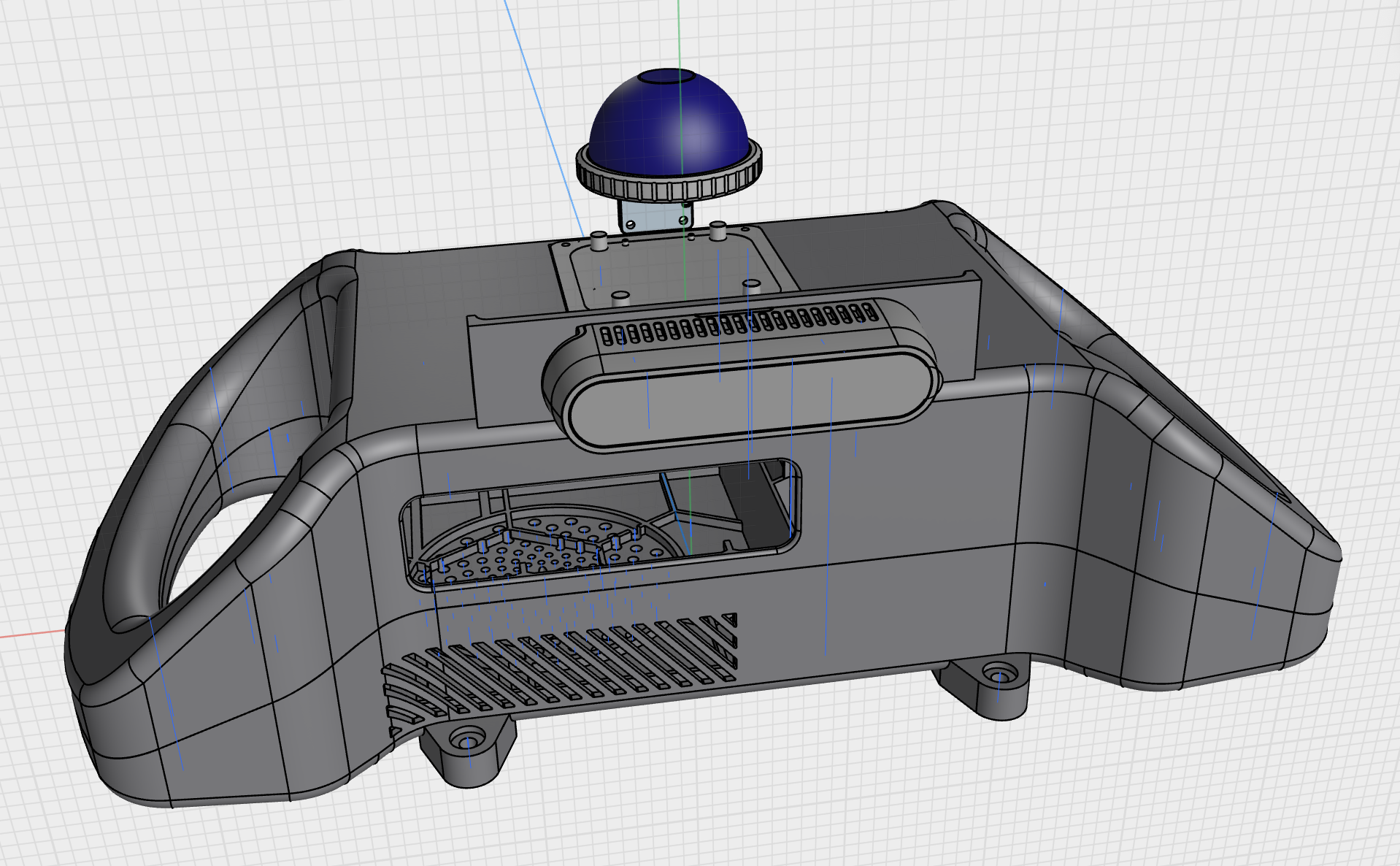 |
 |
这个仓库介绍了一款手持设备,将 Nvidia Jetson、Livox Mid360以及Realsense相机集成到一个硬件上,你可以通过3D打印的方式,方便快捷地进行组装。内置一个电池仓,以及视觉传感器孔位,通过替换中间件即可快速适配不同型号的视觉传感器。在设备底部添加了四个固定螺纹孔,你可以将其安装到移动小车上,配合 Jetson 算力实现一体式解决方案。我们同时还提供了多个常用工程在 Arm 架构上编译的手册,包括 SLAM、标定、GPU加速、pytorch 编译等。
目录
设备亮点
我们很荣幸推出一款手持设备,它将 Nvidia Jetson、Livox Mid360、RealSense 相机硬件合理地组装在一起,并提供了符合人体工程学设计的把手。该设备的有一下几个特点:
- 模块化组装:每部个结构均可通过3D打印获得,并用螺丝进行加固,你可以随时替换算力板、雷达、视觉相机组件,只需一个中间结构件;
- 紧凑的结构设计:在保证高空间利用率的同时,提供了多处散热槽以确保设备正常工作,你也可以通过模块化组件添加额外的散热风扇;
- 为 Jetson 量身定制:算力仓根据 Orin DK 尺寸设计,兼容除 Thor 以外的所有 Jetson 计算板,同样只需要一个中间结构件;
- 内置电池仓:内置的电池仓可以让你随时随地开机即用,无需携带额外电源;
- 手持握把:在设备两侧提供了人体工程学设计的握持把手,均匀将力分配到两臂,一次性使用 1 小时也不会感到疲惫;
- 预留螺纹孔:手持扫描结束后可以通过预留的四个螺纹孔将其安装到其他硬件平台上,无需其他算力;
另一方面,由于在 Arm 上编译一些优秀的开源工程极具挑战性,我们也为部分项目撰写了编译手册,以便让你能够在这里找到一站式解决方案,当前支持的开源项目有:
【注意】:有关编译手册的内容详情请见后续的 编译与应用 章节,下面的链接为原始项目链接。
- FAST-LIO: https://github.com/hku-mars/FAST_LIO#
- FAST-LIVO2: https://github.com/hku-mars/FAST-LIVO2
- Point-LIO: https://github.com/hku-mars/Point-LIO#
- livox_camera_calib: https://github.com/hku-mars/livox_camera_calib
- Yolov11 with GPU: https://github.com/ultralytics/ultralytics
更多开源项目的编译我们会持续推出,敬请期待!
物料清单
因平台审核原因,物料清单无法在这里展示,感兴趣的可以直接访问我们的仓库,里面有全部详细信息。
组装
下载文件 0000-shouchijiance_asm.stp 并用 3D 打印机进行打印。由于模块化设计,你仅需要注意的是计算单元仓和电池仓的尺寸,同时如果你的电池输入输出孔位与我们模型不符,建议稍微修改电池仓开孔位置。
- 计算单元仓尺寸:110mm x 110mm x 71mm
- 电池仓尺寸:93mm x 70mm x 59mm
如果你想要让 Mid360 雷达倾斜安装,那么也可以通过增加中间件的方式实现,为激光雷达添加一个斜坡。
最终我们的组装效果如下所示:
| Front | Left | Back | Top | Button |
|---|---|---|---|---|
 |
 |
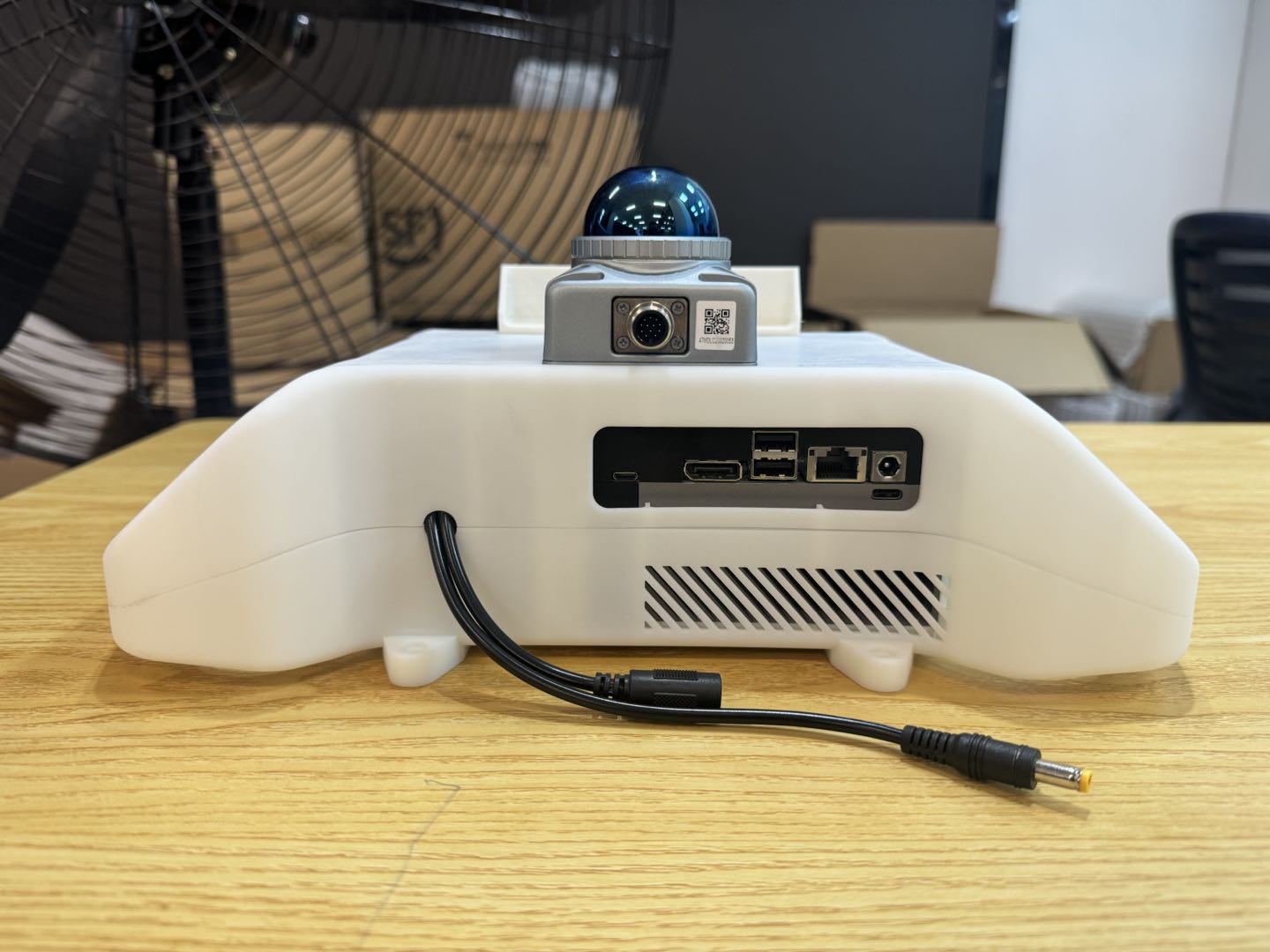 |
 |
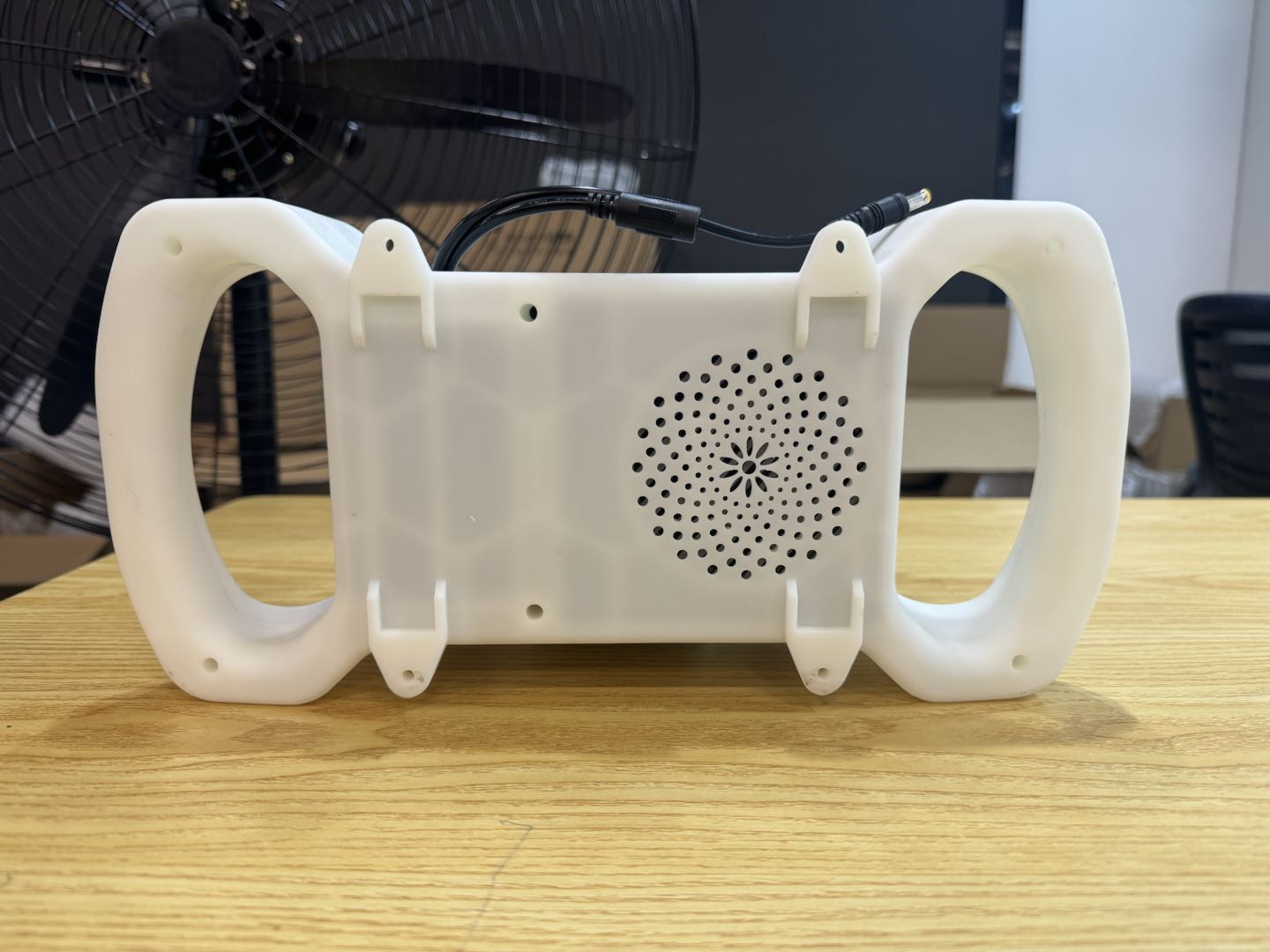 |
编译与应用
我们对广受好评的一些工程提供了在 Jetson 平台上编译的手册,包括了以下内容:
- Fast-LIO: https://github.com/GaohaoZhou-ops/JetsonSLAM/tree/main/fast_lio_project
- Fast-LIVO2: https://github.com/GaohaoZhou-ops/JetsonSLAM/tree/main/fast_livo2_project
- Point-LIO: https://github.com/GaohaoZhou-ops/JetsonSLAM/tree/main/point_lio_project
- livox_camera_calib: https://github.com/GaohaoZhou-ops/Lidar-Camera-Calibration
- Yolov11: https://github.com/GaohaoZhou-ops/JetsonYoloROS
除此之外,还有一些我们自己使用的 Demo 示例可用于参考:
- Tello-LLM-ROS: https://github.com/GaohaoZhou-ops/Tello-LLM-ROS
- Mixed-Navigation: https://github.com/GaohaoZhou-ops/Mixed-Navigation
我们后续会补充更多工程在 Jetson 平台上的编译手册。