在地球观测领域,时空分辨率的矛盾是长期困扰科研与应用人员的"达摩克利斯之剑"。NASA发起的Harmonized Landsat Sentinel-2 (HLS)项目,通过一套精密的算法体系,将Landsat-8/9和Sentinel-2A/B的数据流"谐和"成一个无缝、高频、分析就绪的虚拟星座。
**一、 HLS的诞生与演进
HLS的初心是解决时序分析的核心痛点:在保持30米空间分辨率下,实现2-3天的观测频率。然而,将分属NASA/USGS和ESA两大机构、技术指标各异的旗舰卫星数据整合成"如同出自单一传感器"的数据立方体,绝非易事。
HLS项目的发展本身就是一个不断迭代、精益求精的过程。最新的 v2.0版本 相较于早期的v1.4/v1.5,实现了质的飞跃:
- 覆盖范围 :从北美和部分试点区域扩展至全球陆地(南极洲除外)。
- 输入源更新 :全面采用几何精度更高的 Landsat Collection 2 数据作为输入,该数据本身已使用Sentinel-2的全球参考影像(GRI)进行精校,为高质量融合奠定了基础。
- 算法升级:对大气校正、BRDF归一化等核心算法进行了优化和扩展。
- 产品格式 :采用云优化GeoTIFF (COG) 格式分发,极大地方便了云端计算和按需索取,用户不再需要下载整个Tile的庞大数据。
这些演进标志着HLS已从一个研究性项目,逐步走向成熟的、可支撑全球尺度业务化应用的科学数据产品。
二、 炼金术揭秘
HLS的魔力在于其严谨的后台处理流程。以下我们将深入剖析每个环节的技术细节与取舍。
1. 几何谐和 (Geometric Harmonization)
- 基准统一 :所有数据被统一重投影至Sentinel-2的军事格网参考系统(MGRS)。这是一个关键决策,意味着整个HLS体系以S2的空间框架为准。
- 为何仍需重采样? 即使Landsat C2的绝对几何精度已大幅提升,但USGS定义的UTM坐标原点对应像元中心 ,而ESA则对应像元角点 。这个微小但致命的差异使得简单的坐标平移无效,必须通过三次卷积插值进行重采样,才能实现亚像素级的精准对齐。
- 降采样策略 :在S30产品制作中,将S2原始的10m/20m/60m分辨率统一到30m时,采用了面积加权平均法。这种方法比简单的最邻近或双线性插值更能保留原始高分辨率像元内部的辐射信息完整性。
- 历史遗留问题处理 :对于2016年中期(处理基线v02.04)之前的S2 L1C数据,由于存在偏航角误差,HLS仍会启用AROP (自动配准与正射校正软件包),将其与高质量的参考影像进行配准,以修正几何偏差。
2. 大气谐和 (Atmospheric Harmonization)
- 算法统一 :统一采用C语言版本的LaSRC v3.5.5算法。该算法是Landsat官方表面反射率产品的核心,并通过了CEOS ACIX-I国际大气校正算法比对的严格验证,其精度和稳定性得到了广泛认可。
- 物理模型:基于6SV辐射传输模型,输入MODIS提供的动态大气水汽、臭氧数据,并结合DEM计算地表气压,以精确校正气体吸收和瑞利散射。
- 气溶胶反演的挑战与假设:大气校正最不确定的部分是气溶胶。LaSRC假设了一种普适的"大陆型"气溶胶模型,通过地表蓝光和红光波段的反射率比值关系来反演气溶胶光学厚度(AOT)。这是一个经验性的高效方法,但在某些极端条件下可能存在不确定性,例如在**"已知问题"**中提到的:在高亮地表(如沙漠、城市)上空,该算法有时会错误地反演出极高的AOT,导致地表反射率被过度压低。这些像元会在QA层中被标记为"高气溶胶",用户应予以剔除。
3. 角度谐和 (BRDF Harmonization)
- 核心目标 :消除方向性效应,使数据具有多时相、多角度间的可比性。HLS将所有观测归一化到天顶视角(Nadir)。
- 关键升级(v2.0) :与早期版本不同,v2.0的BRDF归一化同样适用于Sentinel-2的红边波段。这是通过对MODIS红光和近红外波段的BRDF模型系数进行线性插值实现的,极大地提升了红边波段在时序分析中的一致性。
- 太阳天顶角的精细化处理 :HLS不仅校正视角,还对太阳天顶角(SZA)进行了精细的归一化。由于L8和S2过境时间相差30分钟,且同一景影像内SZA也存在变化,HLS并非将SZA校正到一个固定值,而是校正到一个根据纬度和年积日计算出的理论平均太阳天顶角。这样做既消除了因过境时间、轨道位置差异引入的SZA"跳变",又保留了SZA随季节变化的平滑趋势,最大程度地还原了地表反射率的真实季节节律。
4. 光谱谐和 (Spectral Harmonization)
- 基准选择 :以Landsat-8 OLI传感器的光谱响应函数为基准,将Sentinel-2 MSI的同名波段调整为"OLI-like"。
- 实现方式 :基于全球采集的海量Hyperion高光谱数据,为S2A和S2B的每个同名波段分别 建立了高精度的线性回归模型 (
SR_OLI-like = a * SR_MSI + b)。注意,由于S2A和S2B的传感器存在微小差异,它们的调整系数是不同的,这体现了HLS处理的精细程度。 - 范围限定:光谱谐和仅应用于两个传感器都有的"共同波段"。S2独有的红边、水汽等波段和L8独有的卷云、热红外波段均不进行调整,以保留其原生信息。
三、 波段设置:统一中的个性化与数据结构
HLS的波段设计兼顾了时序一致性与信息丰富度。
| HLS Band Name | Description | Source | Harmonized? | 备注 |
|---|---|---|---|---|
| B01 | Coastal Aerosol | L8 / S2 | Yes | 谐和波段,用于水体和气溶胶研究 |
| B02 | Blue | L8 / S2 | Yes | 谐和波段,构成可见光基础 |
| B03 | Green | L8 / S2 | Yes | 谐和波段,构成可见光基础 |
| B04 | Red | L8 / S2 | Yes | 谐和波段,计算NDVI等指数 |
| B05 (S30) | Red Edge 1 | S2 Only | No (Unique) | S2独有,对植被健康敏感,已BRDF校正 |
| B06 (S30) | Red Edge 2 | S2 Only | No (Unique) | S2独有,对植被健康敏感,已BRDF校正 |
| B07 (S30) | Red Edge 3 | S2 Only | No (Unique) | S2独有,对植被健康敏感,已BRDF校正 |
| B08 (S30) | NIR Broad | S2 Only | No (Unique) | S2独有,宽近红外波段 |
| B8A (S30) | NIR Narrow | S2 Only | Yes | 与L30的B05 (NIR) 对应并谐和 |
| B05 (L30) | NIR Narrow | L8 Only | Yes | 与S30的B8A (NIR) 对应并谐和 |
| B09 (S30) | Water Vapor | S2 Only | No (Unique) | S2独有,大气水汽探测 |
| B09 (L30) | Cirrus | L8 Only | No (Unique) | L8独有,卷云探测 |
| B10 (L30) | Thermal Infrared 1 | L8 Only | No (Unique) | L8独有,地表温度,为TOA亮温 |
| B11 (L30) | Thermal Infrared 2 | L8 Only | No (Unique) | L8独有,地表温度,为TOA亮温 |
| B11 (S30) | SWIR 1 | S2 Only | Yes | 与L30的B06 (SWIR1) 对应并谐和 |
| B06 (L30) | SWIR 1 | L8 Only | Yes | 与S30的B11 (SWIR1) 对应并谐和 |
| B12 (S30) | SWIR 2 | S2 Only | Yes | 与L30的B07 (SWIR2) 对应并谐和 |
| B07 (L30) | SWIR 2 | L8 Only | Yes | 与S30的B12 (SWIR2) 对应并谐和 |
| Fmask | Quality Assessment | L8 / S2 | Yes (Same Algo) | 统一使用Fmask 4.2算法生成的质量掩膜 |
关键解读 :注意HLS为了统一命名,重新编排了波段号,如Landsat的近红外B5在L30产品中也叫B05,但它实际与Sentinel-2的窄近红外B8A对应并谐和。用户在计算指数时,应使用HLS的波段名 ,如NDVI = (B8A - B04) / (B8A + B04),这样无论输入是L30还是S30,GEE都能自动找到正确的波段。
四、 实战演练:在Google Earth Engine (GEE) 中快速上手HLS
GEE平台是使用HLS最高效的方式。
- L30 Collection ID :
NASA/HLS/HLSL30/v002 - S30 Collection ID :
NASA/HLS/HLSS30/v002 - 数据集主页 : LP DAAC
以下是经过优化的GEE JavaScript代码,加入了更详细的QA掩膜解释:
javascript
// HLS v2.0 GEE实战代码示例 (深度注释版)
// 1. 定义研究区和时间范围
var point = ee.Geometry.Point([-122.27, 37.87]); // 美国加州伯克利
var startDate = '2023-01-01';
var endDate = '2023-12-31';
// 2. 加载并合并HLS L30和S30数据集
var l30 = ee.ImageCollection('NASA/HLS/HLSL30/v002');
var s30 = ee.ImageCollection('NASA/HLS/HLSS30/v002');
var hls = l30.merge(s30)
.filterBounds(point)
.filterDate(startDate, endDate);
// 3. 定义云和高气溶胶掩膜函数 (基于Fmask QA层)
// 参考文档:https://lpdaac.usgs.gov/documents/1326/HLS_User_Guide_V2.pdf (Table 9)
function applyQaMask(image) {
var qa = image.select('Fmask');
// 比特位: 0=卷云, 1=云, 2=邻近云, 3=云阴影, 4=雪/冰, 5=水, 6-7=气溶胶水平
var cloudBitMask = (1 << 1);
var cloudShadowBitMask = (1 << 3);
var adjacentCloudBitMask = (1 << 2);
// 气溶胶掩膜: bit 6和7。 11 (二进制) = 3 (十进制),代表 "High aerosol"
var aerosolQa = qa.rightShift(6).bitwiseAnd(3); // 提取气溶胶比特位
// 掩膜条件: 像素是干净的(非云、非云影、非邻近云)且气溶胶水平不是"高"
var mask = qa.bitwiseAnd(cloudBitMask).eq(0)
.and(qa.bitwiseAnd(cloudShadowBitMask).eq(0))
.and(qa.bitwiseAnd(adjacentCloudBitMask).eq(0))
.and(aerosolQa.neq(3));
// 所有波段乘以scale factor,并应用掩膜
return image.updateMask(mask)
.select('B.*').multiply(0.0001)
.copyProperties(image, ["system:time_start"]);
}
// 4. 定义NDVI计算函数
function addNDVI(image) {
// 在v2数据集中,L30的NIR(B5)和S30的NIR(B8A)都对应谐和后的'B8A'波段
var ndvi = image.normalizedDifference(['B8A', 'B04']).rename('NDVI');
return image.addBands(ndvi);
}
// 5. 应用函数到整个影像集
var hls_processed = hls.map(applyQaMask).map(addNDVI);
// 6. 按日期排序
var hls_sorted = hls_processed.sort('system:time_start');
// 7. 创建时间序列图表
var chart = ui.Chart.image.series({
imageCollection: hls_sorted.select('NDVI'),
region: point,
reducer: ee.Reducer.mean(),
scale: 30
}).setOptions({
title: 'HLS NDVI Time Series (v2.0 - Masked)',
vAxis: {title: 'NDVI', viewWindow: {min: 0, max: 1}},
hAxis: {title: 'Date'},
pointSize: 3,
lineWidth: 1,
series: {0: {color: 'green'}}
});
// 9. 显示图表和研究点
print(chart);
Map.centerObject(point, 12);
Map.addLayer(point, {color: 'FF0000'}, 'Point of Interest');五、 HLS的杀手级优势与应用场景
核心优势总结
- 前所未有的时间分辨率:在全球尺度上提供2-3天的30米观测能力,这是MODIS等粗分辨率传感器才有的频率,但HLS的空间细节丰富了百倍以上。
- 极致的数据一致性:通过四重谐和(几何、大气、角度、光谱),HLS最大限度地消除了传感器差异,提供了真正意义上的"分析就绪数据"(ARD),用户无需再为繁琐的预处理头疼。
- 信息丰富度:不仅保留了L8/S2的共同波段,还完整提供了S2独有的红边波段和L8的热红外波段,为精细化研究提供了更多维度。
- 全球覆盖与云端原生:v2.0覆盖全球,并以COG格式存储在云端,完美适配GEE等云平台,实现了对海量数据的即时、高效访问与分析。
典型应用领域
- 精准农业:在作物整个生育期内进行高频监测,精确捕捉返青、抽穗、成熟等关键物候期,指导灌溉、施肥,并进行精准的作物分类和估产。
- 森林生态:监测森林的季节性变化、健康状况(如病虫害胁迫),以及对干旱、火灾等干扰的响应与恢复过程。高时间分辨率能捕捉到快速的森林扰动事件。
- 水资源管理:监测内陆湖泊、水库的水体面积动态变化、水华(藻类爆发)的生消过程,以及积雪的融化速度,为水资源调度提供数据支持。
- 灾害应急响应:在洪水、火灾、火山喷发等灾害发生后,快速获取灾前灾后影像,进行损失评估、淹没范围界定和灾后恢复监测。2-3天的重访周期大大提升了响应时效性。
- 土地利用/土地覆盖变化监测:能够捕捉到更加精细和快速的土地利用变化,如城市扩张、非法采矿、季节性休耕等,而不仅仅是年度级别的变化。
六、 实战进阶:HLS的分层精细化分类范式------以作物分类为例
单凭一景影像很难区分光谱特征相似的作物,但它们的"生长节律"------即物候------却大相径庭。HLS的超高时间分辨率正是解锁物候特征的钥匙。传统的时序分类方法,虽然有效,但往往将L30和S30数据"一视同仁"地投入一个模型中,这在某种程度上"浪费"了两个传感器各自的独有信息。
一种更高级、更具洞察力的范式是分层精细化分类策略。该策略充分利用了HLS数据集的"合"与"分":先用合并后的高频数据进行宏观模式识别,再针对性地调取特定时间窗口内的L30或S30原生数据,利用其独有波段进行精细辨识。
这套方法的逻辑核心是:用整体把握"节律",用个体洞察"细节" 。
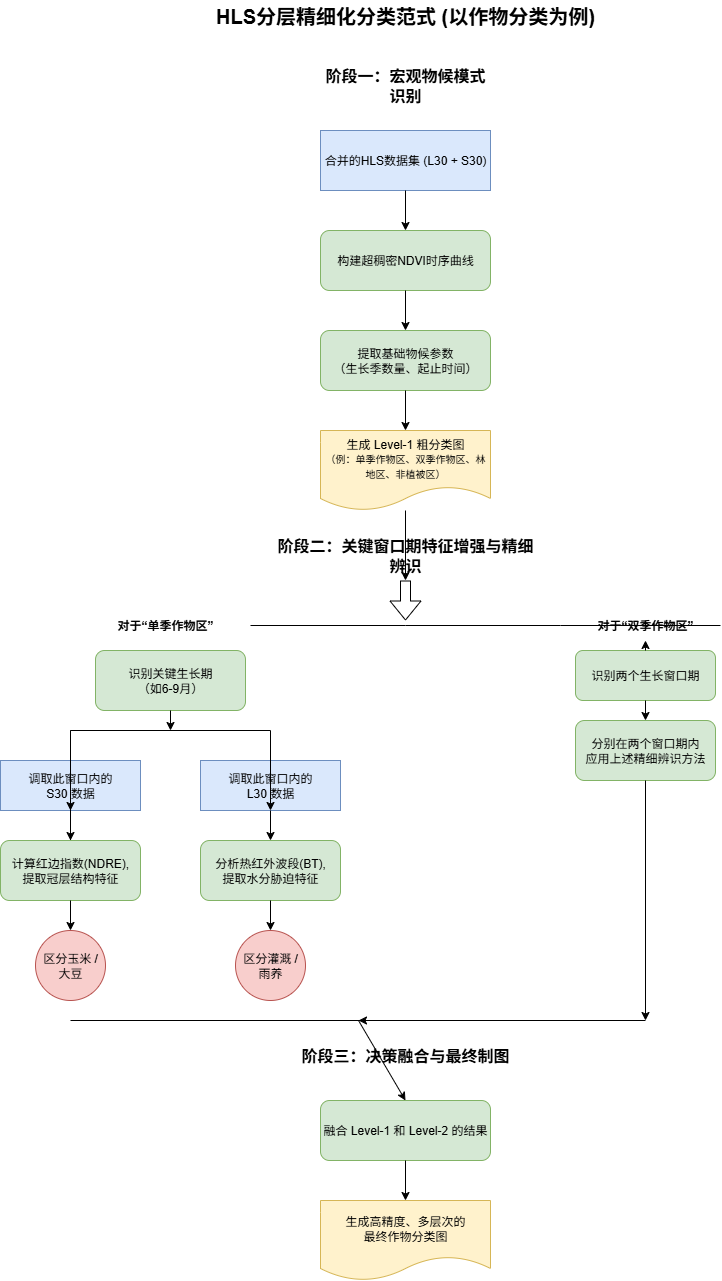
第一阶段:基于合并HLS的宏观物候模式识别
此阶段的目标是"画出骨架",对研究区的种植模式进行宏观划分。
- 构建稠密时序曲线:如前述GEE代码所示,将一年内的L30和S30影像合并、去云,为每个像元构建一个包含几十个数据点的、近乎连续的NDVI时间序列。
- 提取基础物候特征:对这条曲线进行分析,提取最基本的节律信息。例如,通过峰值检测算法,可以轻松判断一个像元在一年内经历了一个生长季(单季作物,如春玉米),还是两个生长季(双季作物,如冬小麦-夏玉米轮作)。同时,记录每个生长季的起止时间(SOS/EOS)。
- 生成Level-1粗分类图:基于上述特征,使用简单的决策树或阈值法,即可生成一张初步的分类图,将地表划分为几个大类,如"单季夏季作物区"、"冬春季/夏季轮作区"、"常绿林地区"、"非植被区"等。这张图为下一阶段的精细分析圈定了目标和范围。
第二阶段:基于特定传感器的关键窗口期精细辨识
此阶段的目标是"丰富血肉",在宏观框架内,利用L30和S30的独有优势,解决具体作物类型间的"混淆"问题。
假设我们已经从第一阶段识别出了"单季夏季作物区",并且知道其关键生长期大致在6月到9月。在这个区域,我们面临的主要挑战是区分玉米和大豆这两种物候节律相似的作物。
-
策略A:利用S30的红边波段进行物种辨识
- 数据选择 :我们不再使用合并的HLS集,而是直接查询
NASA/HLS/HLSS30/v002影像集,并筛选出时间在6月至9月之间、且位于"单季夏季作物区"内的所有S30影像。 - 特征增强 :玉米(C4植物)和大豆(C3植物)在叶片结构和氮含量上存在差异,这些差异在红边波段 上表现得比在普通红光/近红外波段上更为敏感。我们可以计算一系列红边植被指数,如归一化红边指数 (NDRE) :
(B8A - B05) / (B8A + B05)。 - 精细分类:将这些在关键窗口期内计算出的红边指数(如旺盛期的均值、最大值等)作为新的特征,投入一个专门用于区分玉米和大豆的分类器中。
- 数据选择 :我们不再使用合并的HLS集,而是直接查询
-
策略B:利用L30的热红外波段进行管理方式辨识
- 数据选择 :同理,查询
NASA/HLS/HLSL30/v002影像集,筛选出关键生长窗口期(尤其是高温干旱期,如7-8月)的L30影像。 - 特征增强:L30独有的**热红外波段(B10)**提供了地表亮温信息。在相同的气象条件下,水分充足的植被由于蒸腾作用强,其冠层温度会相对较低。
- 精细分类 :通过分析7-8月晴空无云日的午后L30影像的亮温,我们可以有效地将作物区分为灌溉农田 (温度较低且稳定)和雨养农田(温度较高且波动大)。
- 数据选择 :同理,查询
第三阶段:决策融合与最终制图
最后一步是将前两个阶段的成果进行融合。这是一个简单的逻辑替换过程:
- 以Level-1的粗分类图为底图。
- 找到所有被标记为"单季夏季作物区"的像元。
- 将这些像元的值,替换为第二阶段策略A(玉米/大豆)和策略B(灌溉/雨养)的组合分类结果,例如"灌溉玉米"、"雨养大豆"等。
- 对其他大类(如"双季作物区")重复第二阶段的精细辨识和第三阶段的融合过程。
最终,我们得到的是一幅远比单一分类器输出结果更丰富、更准确、信息层次更清晰的土地覆盖/作物分类专题图。
该范式的革命性意义在于,它将HLS从一个单纯的"数据融合产品"提升为一个"分析策略平台"。它允许研究者根据具体问题,在"时间分辨率最大化"和"信息维度最大化"之间进行动态、智能的切换,将数据驱动的分析推向了一个新的高度。
七、 实践中的考量与已知问题
- QA层的混合特性:HLS的QA掩膜在重采样时遵循"存在即为真"(Presence Rule)原则。例如,一个30米的S30像元覆盖的9个10米像元中,只要有1个是云,这个30米像元就会被标为云。这意味着一个HLS像元可能同时具有"云"和"水"的标记,这不是错误,而是其混合像元属性的反映。
- 高亮地表的气溶胶问题 :如前所述,在沙漠、城市等明亮地表,LaSRC算法可能过高估计气溶胶,导致反射率偏低。这些像元在QA层中会被标记为"高气溶胶"(比特6-7为
11),强烈建议在分析中将其作为坏点剔除。 - 数据延迟 :"Keep-up"处理模式旨在将数据延迟控制在2天以内,但这仍是一个"研究级"产品,其稳定性和延迟可能会受上游数据可用性的影响。
- 热红外波段 :L30产品包含的两个热红外波段(B10, B11)是未进行大气校正的大气层顶亮温(TOA BT),单位是摄氏度。用户若需进行精确的地表温度反演,需自行进行大气校正和发射率校正。
八、 学习资料与官方链接
为了帮助您更深入地学习和使用HLS数据集,以下整理了几个最核心的官方资源链接及其内容简介。
1. Google Earth Engine (GEE) 数据目录
- HLSL30 (Landsat-based) : developers.google.com/earth-engine/datasets/catalog/NASA_HLS_HLSL30_v002
- HLSS30 (Sentinel-2-based) : developers.google.com/earth-engine/datasets/catalog/NASA_HLS_HLSS30_v002
- 内容描述 :这是在GEE中使用HLS数据的首选入口和速查手册。页面清晰地列出了数据集的GEE ID、详细的波段列表(包括名称、分辨率、单位和描述)、时间范围以及可直接运行的JavaScript代码示例。
2. NASA Earthdata 数据门户
- HLSL30 (Landsat-based) : www.earthdata.nasa.gov/data/catalog/lpcloud-hlsl30-2.0
- 内容描述 :这是NASA官方的数据集"身份证"。它提供了该数据集的数字对象标识符(DOI),这在学术论文引用中至关重要。此外,页面还包含更详尽的元数据、数据质量摘要、以及非GEE用户获取数据(如下载原始COG文件)的多种途径。
3. 核心技术文档
- HLS v2.0 用户指南 (User Guide) : lpdaac.usgs.gov/documents/1698/HLS_User_Guide_V2.pdf
- 内容描述 :这是每一位HLS数据用户的必读文件 。它详细解释了产品的方方面面,特别是对Fmask质量评估(QA)层的比特位进行了逐一解码说明,这是正确进行数据去云和质量控制的关键。文档还涵盖了文件命名规则、数据格式、已知问题等所有实用信息。
- HLS v1.5 算法理论基础文档 (ATBD) : lpdaac.usgs.gov/documents/769/HLS_ATBD_V15_provisional.pdf
- 内容描述 :这是一份高度技术性的文档,深入剖析了HLS算法背后依赖的科学理论、数学模型和物理假设。虽然是针对较早的v1.5版本,但其关于大气校正、BRDF归一化、光谱调整等核心算法的原理描述,对于理解整个谐和框架的构建思路和不确定性来源,至今仍具有极高的参考价值。
总结
HLS数据集不仅是两款卫星数据的简单叠加,而是通过一套严谨、物理意义明确的算法体系,将全球最优秀的两套中分辨率对地观测系统有机地"谐和"在一起的产物。从v1.5到v2.0的演进,我们看到了其在全球覆盖、算法精度和产品易用性上的巨大进步。深入理解其背后的谐和原理、版本差异、波段特性及潜在限制,并结合GEE等云平台,将使我们能最大限度地发掘这一革命性数据集在科学研究与商业应用中的巨大潜力。
欢迎点赞,收藏,关注,支持小生,打造一个好的遥感领域知识分享专栏。
同时欢迎私信咨询讨论学习,咨询讨论的方向不限于:地物分类/语义分割(如水体,云,建筑物,耕地,冬小麦等各种地物类型的提取),变化检测,夜光遥感数据处理,目标检测,图像处理(几何矫正,辐射矫正(大气校正),图像去噪等),遥感时空融合,定量遥感(土壤盐渍化/水质参数反演/气溶胶反演/森林参数(生物量,植被覆盖度,植被生产力等)/地表温度/地表反射率等反演),点云处理,三维重建以及高光谱数据处理等领域以及深度学习,机器学习等技术算法讨论,以及相关实验指导/论文指导,考研复习等多方面。