落脚点:自动驾驶?具体的自动驾驶车辆怎么做的
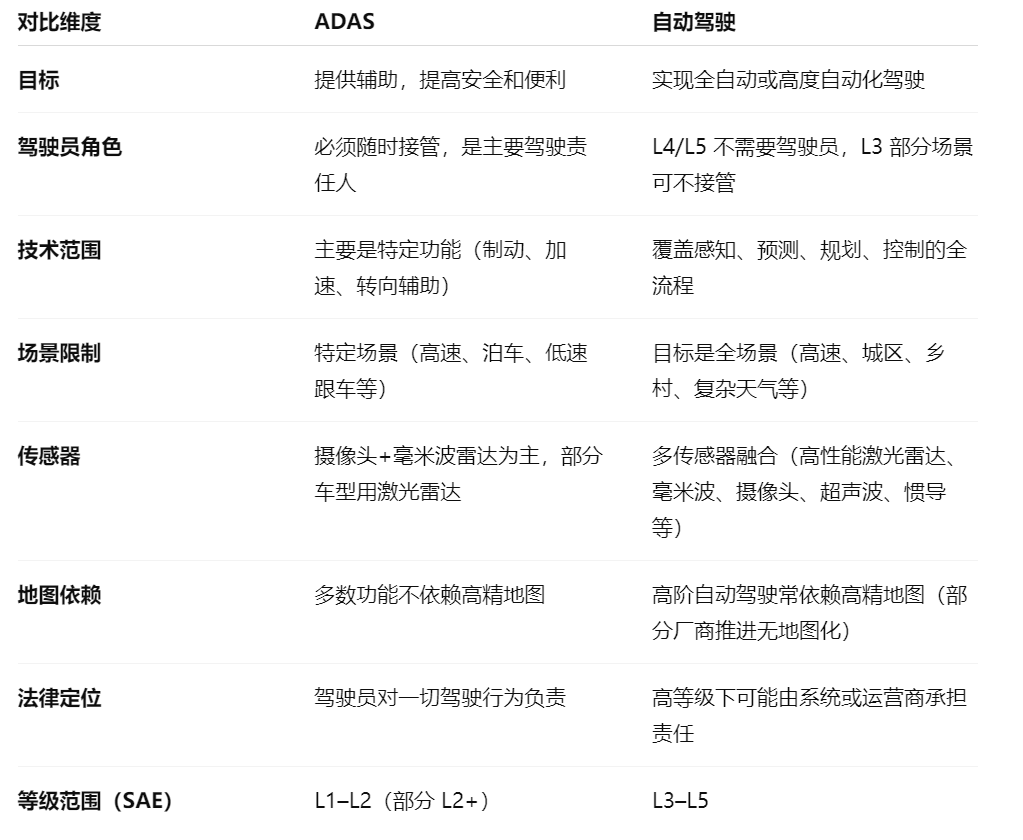
智能驾驶与高级驾驶辅助系统(Advanced Driver Assistance Systems, ADAS)
-
ADAS(Advanced Driver Assistance Systems,高级驾驶辅助系统)
主要是辅助 驾驶员提高驾驶安全性、舒适性和便利性,通过感知、判断和部分控制功能,降低事故风险,但驾驶员始终是最终决策和责任主体 。
例子:自适应巡航(ACC)、车道保持(LKA)、自动紧急制动(AEB)。
-
自动驾驶(Autonomous Driving)
车辆能在无驾驶员干预或极少干预的情况下,完成感知、决策、控制的全流程驾驶任务,可分为 SAE Level 0--5 等多个等级。高等级(L4、L5)自动驾驶理论上可完全替代人类驾驶员 。
例子:Waymo Robotaxi、特斯拉 FSD(部分场景)、百度 Apollo Go。
1. ADAS 目前的发展阶段
ADAS 已经经历了三个阶段的演进:
-
功能性阶段(L1--L2)
-
代表功能:ACC(自适应巡航)、AEB(自动紧急制动)、LDW(车道偏离预警)、LKA(车道保持辅助)等。
-
特点:单一功能为主,依赖雷达/摄像头的独立感知,不具备真正的场景理解能力。
-
状态:已大规模量产,功能较为成熟,但智能化程度有限。
-
-
融合阶段(L2+--L3)
-
代表功能:高速 NOA(Navigate on Autopilot)、融合泊车、交通拥堵辅助(TJA)。
-
特点:多传感器融合(摄像头+毫米波雷达+超声波雷达+部分车型搭载激光雷达),感知精度和覆盖度提升,能够在限定场景下实现半自动驾驶。
-
状态:2020 年后快速普及,特斯拉、蔚小理、智己、华为 ADS 等都在做高速和城区 NOA,国内 L2+ 渗透率已超过 35%。
-
-
智能化阶段(L3--L4 边缘)
-
代表功能:城区 NOA、复杂路口自动通过、自动变道与超车、红绿灯识别与自动响应。
-
特点:深度依赖高精地图/高精定位与端到端感知-决策-控制架构,AI 算法(尤其是 Transformer、BEV 感知、端到端学习)逐步替代传统基于规则的模块化方案。
-
状态:技术快速迭代中,但法规和责任界定仍是商业化瓶颈。
-
2. ADAS 还具有的创新空间
虽然低阶功能趋于成熟,但 ADAS 仍有大量创新空间,尤其在以下方向:
-
全场景化能力:从高速拓展到城区、乡村道路、停车场、极端天气等全覆盖。
-
无地图化驾驶:减少对高精地图的依赖,通过实时感知+预测实现路径规划(特斯拉 FSD Beta、中国一些新势力已经在做)。
-
驾驶风格自适应:根据用户偏好、交通环境自动调整跟车距离、加减速策略(和你论文研究的"风格化驾驶行为建模"高度契合)。
-
人机共驾决策融合:让系统理解驾驶员意图,提前介入风险场景(预测性干预,而不仅是被动纠错)。
-
长尾场景应对:更好地处理罕见的、复杂的风险场景(恶劣天气、突发路障、异常交通参与者等)。
-
AI 驱动的端到端架构:减少传统规则和中间特征工程,直接用深度神经网络从感知输入输出控制指令,提高决策灵活性与泛化能力。
3. ADAS 并未发展到尽头的原因
-
法规与市场逐步放开:比如欧盟、美国、日本、中国陆续开放 L3 上路测试,商业化空间还很大。
-
长尾问题尚未解决:极端工况下的安全性依然是技术难点。
-
人机共驾是长期形态:在全面 L4/L5 前,ADAS 仍是绝大多数汽车的标配与升级重点。
-
技术与数据迭代带来新可能:AI 模型(如 Transformer+BEV)、算力(车规级大算力芯片)、传感器(固态激光雷达、4D 毫米波雷达)不断进步。
"L2级"是汽车自动驾驶功能分级中的一个级别。国际汽车工程师学会(SAE)将自动驾驶分为L0到L5六个级别,L2级表示部分自动化驾驶。在L2级自动驾驶状态下,车辆的驾驶辅助系统可以同时对车辆的转向、加速和制动等操作中的多项进行控制,但驾驶员仍需随时准备接管车辆,以应对系统无法处理的复杂路况或突发情况。例如,一些车辆的L2级自动驾驶功能可以在高速公路上实现自动跟车和车道保持,但当遇到前方道路施工或突然出现的障碍物等特殊情况时,驾驶员需要及时接管车辆,以确保行车安全。
L3级是自动驾驶技术的分水岭,它相比L2级更"聪明能干"。L3级自动驾驶可以在特定的道路和环境中,比如高速公路上,自己完成加速、刹车、转向这些操作,驾驶员可以暂时"脱手、脱脚、脱眼",不需要时刻盯着方向盘和路面。
L4/L5需突破复杂天气、突发障碍物等极端场景处理能力**。**
人工智能+自动驾驶研究报告 清华D5DA8541C99C4AFD23BF42C00D5_EFF30E25_1E2F09.pdf