基于 YOLOv11n 的无人机航拍小目标检测算法问题:无人机航拍图像中小目标检测面临尺度变化大导致的检测精度较低和推理速度较慢等
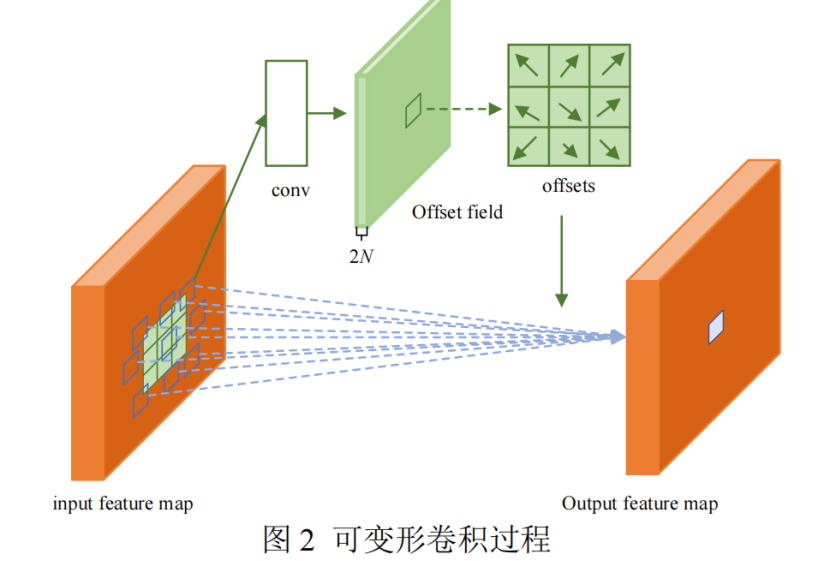
解决:在 C3k2 模块中引入可变形卷积(DCN),增强模型在复杂背景下对
多尺度目标的特征提取能力,特别是对于形变显著的小目标。其次,针对无人机航拍图像中小目标占比较多等情形,新增 P2(Prediction
Layer 2)小目标检测层并去除了 P5(Prediction Layer 5)大目标层,有效提高了小目标特征的捕获精度,同时减少了大目标检测层的
冗余计算。然后,提出了一种结合 Focal Loss 与 DIoU Loss 的 Focal-DIoU(Focal Loss and Distance-IoU Loss)损失函数,解决了小目
标检测中的各目标类别不平衡问题,并优化了边界框的定位精度。最后,采用 LAMP 剪枝方法对模型进行轻量化处理,主要通过适当
调整剪枝加速比,自适应地按层评估并删除冗余连接,减少模型整体计算量并加速推理过程。
结果:文章所提 YOLOv11n-DPD 算法通过引
入可变形卷积、优化小目标检测层结构、改进损失函数和进行模型剪枝,提高了检测精度、加速了推理过程并优化了模型大小,与现
有的小目标检测方法相比表现更优,尤其适用于无人机航拍小目标检测任务和嵌入式平台的部署推理。
可变卷积过程
每个部分增加个偏移量
蛇形卷积