文章目录
- [1 如何测算出任一副图片中的物体的实际尺寸](#1 如何测算出任一副图片中的物体的实际尺寸)
- [2 传感器尺寸与像元尺寸的关系](#2 传感器尺寸与像元尺寸的关系)
- [3 Max Frame Rate最大帧率](#3 Max Frame Rate最大帧率)
- [4 为什么要进行相机标定?相机标定有何意义?](#4 为什么要进行相机标定?相机标定有何意义?)
- [5 基于相机模型的单目测距--普通相机](#5 基于相机模型的单目测距--普通相机)
1 如何测算出任一副图片中的物体的实际尺寸
物体尺寸测量的思路是找一个确定尺寸的物体作为参照物,根据已知的计算未知物体尺寸。
实际尺寸 = (物体像素尺寸 × 物体距离)/(照片分辨率 × 传感器尺寸 × tan(视场角/2));
D表示对角线视角,H表示水平方向视角,V表示垂直方向视角。
2 传感器尺寸与像元尺寸的关系
详解链接:工业相机------靶面尺寸、像元尺寸、分辨率 、传感器尺寸
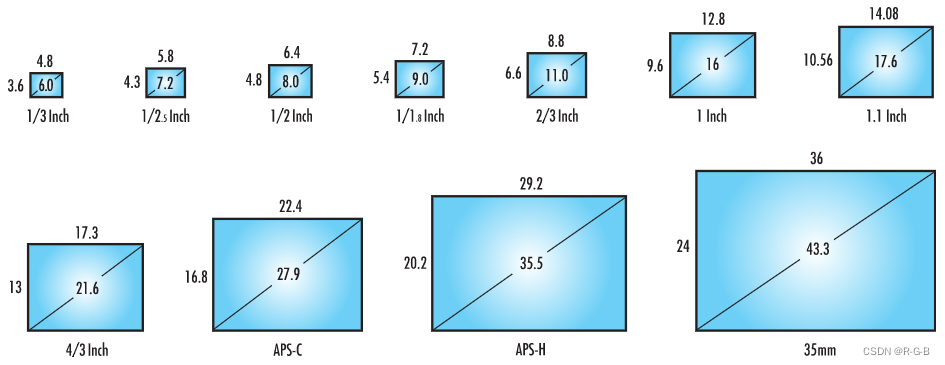
相同分辨率的工业相机,传感器面积越大,则其单位像素的面积也越大,成像质量也会越好。同样的500万像素的工业相机,2/3"的传感器成像质量就要优于1/2"的。一般来说,工业相机的靶面大小,如果要求不是太严格,可以直接按照公式计算。通常,像工业相机厂家会告诉你多少寸的传感器,那么就可以直接使用16mm*X"的传感器得到工业相机的图像传感器的靶面对角线长度。工业相机使用16mm代表1寸,而不是使用25mm。
例如1/2'传感器对角线则为8mm,按照一般的传感器的长宽比为4:3的话,那么就对应勾股定理,1/2'的传感器长宽分辨率为6.4mm、4.8mm。其实厂家也会告诉你像元的大小以及分辨率,同样可以计算传感器的靶面大小。如某相机的分辨率为2588 * 1940的500万像素,像元大小为2.2um,则其传感器的尺寸 长方向为2588 * 2.2=5694um=5.694mm,宽方向为1940 * 2.2=4268um=4.268mm,即为1/2.5"的传感器 。如今大多数传感器像素的形状是正方形的,如果是矩形的话,需要分别使用像素长分辨率的长、像素宽分辨率的宽即可。
Optical Format光学尺寸
光学尺寸越大,则成像系统的尺寸越大,捕获的光子越多,感光性能越好,信噪比越低。目前CMOS图像传感器的常见尺寸有1、2/3、1/2、1/3、1/4英寸等。
Pixel Size像素尺寸
芯片像元阵列上的每个像素的实际物理尺寸,通常的尺寸包括14um、10um、9um、7um、6.45um、3.75um、3.0um、2.0um、1.75um、1.4um、1.2um、1.0um等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。
3 Max Frame Rate最大帧率
帧率指的是单位时间所记录或者播放的图片的数量,连续播放一系列图片就会产生动画效果,根据人类的视觉系统,当图片的播放速度大于15幅/秒的时候,人眼就基本看不出来图片的跳跃。在达到24幅/s~30幅/s时就已经基本觉察不到闪烁现象了。每秒的帧数或者帧率表示CMOS图像传感器在处理图像时每秒钟能够更新的次数。高的帧率可以得到更流畅、更逼真的视觉体验。
4 为什么要进行相机标定?相机标定有何意义?
5 基于相机模型的单目测距--普通相机
下面是关于这几个坐标系的转换。** 叙述思路从像素坐标系一步一步转换到世界坐标系,意味着如何从一个像素点获得世界坐标系的坐标点,从而可以进行实际距离测量 **。