棱镜的技术加持:线扫相机如何同时拍RGB和SWIR?
🎯棱镜的技术加持:线扫相机如何同时拍RGB和SWIR?
机器视觉正在进入"全光谱时代"------既要看到物体表面的颜色纹理,又要看透内部的隐藏缺陷。过去,得用两台相机分别拍可见光(RGB)和短波红外(SWIR),不仅成本高,还容易因不同步导致数据错位。现在,基于棱镜技术的线扫描相机实现了"一镜双拍",让RGB和SWIR数据从同一光路同步产出,给半导体、食品、制药等行业的检测精度带来了质的提升。
🎯一、为什么SWIR成了检测"刚需"?
可见光相机(RGB)擅长看表面:划痕、色差、形状缺陷这些"面子问题"逃不过它的眼睛。但遇到需要"透视"的场景,比如检测硅晶圆内部裂纹、药片填充量、水果内部霉斑,它就力不从心了。
这时候,SWIR(1000-1700nm波段)的优势就凸显了:
- 波长更长,能穿透塑料、玻璃等透明材料,看清表面下的结构;
- 对水分、化学成分敏感,比如能识别食品里的隐性霉变,或药品包装里的填充不足。
但SWIR需要专门的InGaAs传感器(硅基传感器对SWIR不敏感),这就催生了"RGB+SWIR"同时成像的需求。

🎯二、传统双相机方案的3大麻烦
以前想同时用RGB和SWIR,只能并排装两台相机:一台用CMOS传感器拍可见光,一台用InGaAs传感器拍SWIR。但实际用起来问题不少:
- 同步难:两台相机快门略有差异,高速传送带上的物体容易拍错位,数据整合时得反复校准;
- 成本高:双镜头、双支架、双套光源,硬件成本翻倍,安装调试也更复杂;
- 占空间:生产线空间紧张时,两台相机的安装位置很难协调,尤其不适合小型设备。

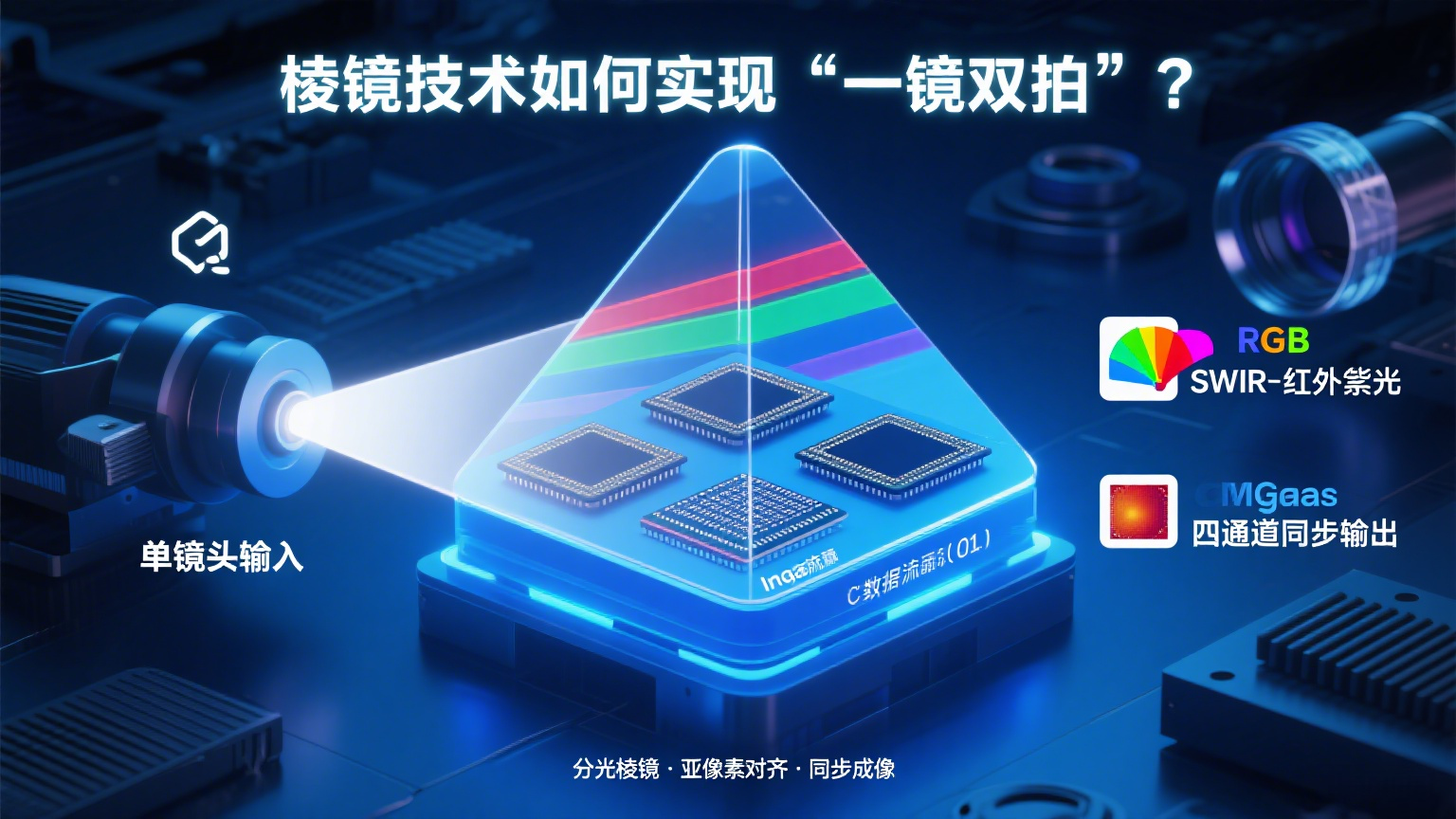
🎯三、棱镜技术如何实现"一镜双拍"?
核心突破在于分光棱镜------用一块精密设计的棱镜,把入射光按波长"劈开",分别导给不同传感器:
- RGB三通道:由3个CMOS传感器接收,负责捕捉400-700nm的可见光,分辨率可达4K;
- SWIR通道:由1个InGaAs传感器接收,专注1000-1700nm波段,精准捕捉亚表面信息。
更关键的是,四个传感器在亚像素级别对齐,拍出来的RGB和SWIR图像天然匹配,不用后期软件校准。就像用一台相机同时戴了"表面镜"和"透视镜",既看得到颜色纹理,又读得懂内部细节。
🎯四、实际用起来,优势不止"同步"
这款线扫相机的实用价值,体现在细节设计上:
- 独立调节:RGB和SWIR通道可以单独调曝光、增益,比如检测透明塑料时,SWIR需要强曝光穿透材料,RGB则要压低亮度避免反光;
- 高速响应:RGB通道行频达20KHz(4K分辨率),SWIR达39KHz(1K分辨率),足以跟上高速生产线;
- 直接兼容:支持HIS、sRGB等多种色彩格式,能直接接入Halcon、OpenCV等主流视觉软件,不用二次开发。

🎯五、哪些行业最该用?
- 半导体/太阳能:RGB查表面划痕,SWIR看硅片内部裂纹,一次检测搞定"表面+深层"质量;
- 食品检测:RGB检查水果表皮损伤,SWIR识别内部霉斑或水分异常,比如挑出看似完好但已变质的苹果;
- 制药包装:RGB核对标签印刷,SWIR透过铝塑包装看药片是否缺损、填充是否达标;
- 回收分拣:SWIR能"看穿"塑料颜色,准确区分PET和PVC(可见光下两者常看起来一样)。

🎯总结:全光谱检测是未来趋势
从"看表面"到"看内外",工业检测对图像信息的需求越来越全面。棱镜技术让RGB和SWIR同步成像从"麻烦事"变成"一键操作",不仅降低了设备成本和复杂度,更让多光谱数据的融合分析变得简单。对追求"零缺陷"的行业来说,这种"一镜双能"的技术,正在重新定义检测精度的天花板。