编译OrbbecSDK_ROS2的代码
执行命令
bash
colcon build
bash
ros2 launch orbbec_camera dabai.launch.py问题1:
运行时报错:
component_container-1 ERROR 1757153916.450795107 camera.camera_container: Failed to load library: Could not load library dlopen error: libopencv_imgcodecs.so.408: cannot open shared object file: No such file or directory, at ./src/shared_library.c:99
解决方案:
进入orbsdk的 lib路径下
bash
cd /home/cat/ros2_navigation_ws/install/orbbec_camera/lib/增加软链接
bash
ln -s /usr/lib/aarch64-linux-gnu/libopencv_imgcodecs.so.4.5d libopencv_imgcodecs.so.408再次执行就不会提示找不到这个库了
问题2:
报错:
component_container-1 ERROR 1757154721.674191725 camera.camera: Failed to initialize device usbEnumerator createUsbDevice failed!
component_container-1 INFO 1757154721.674528589 camera.camera: resetDevice : Reset device uid:
component_container-1 INFO 1757154721.674668876 camera.camera: Reset device uid: done
component_container-1 INFO 1757154721.774475496 camera.camera: Connecting to the default device
解决方案:
添加 udev 规则
bash
sudo vim /etc/udev/rules.d/99-orbbec.rules写入:
bash
SUBSYSTEM=="usb", ATTR{idVendor}=="2bc5", ATTR{idProduct}=="0655", MODE="0666"保存后执行:
bash
sudo udevadm control --reload-rules
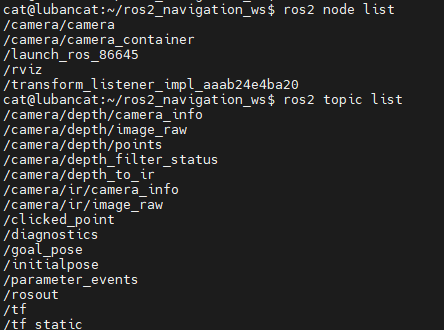
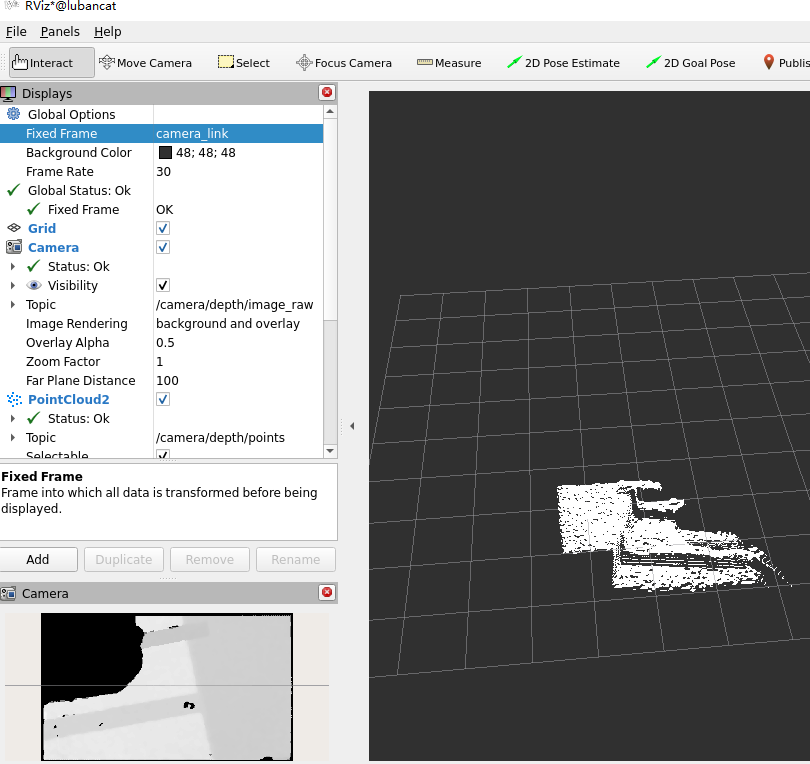
sudo udevadm trigger运行效果