本文系统性介绍毫米波雷达MMIC芯片。
1、车载毫米波雷达MMIC芯片内部架构
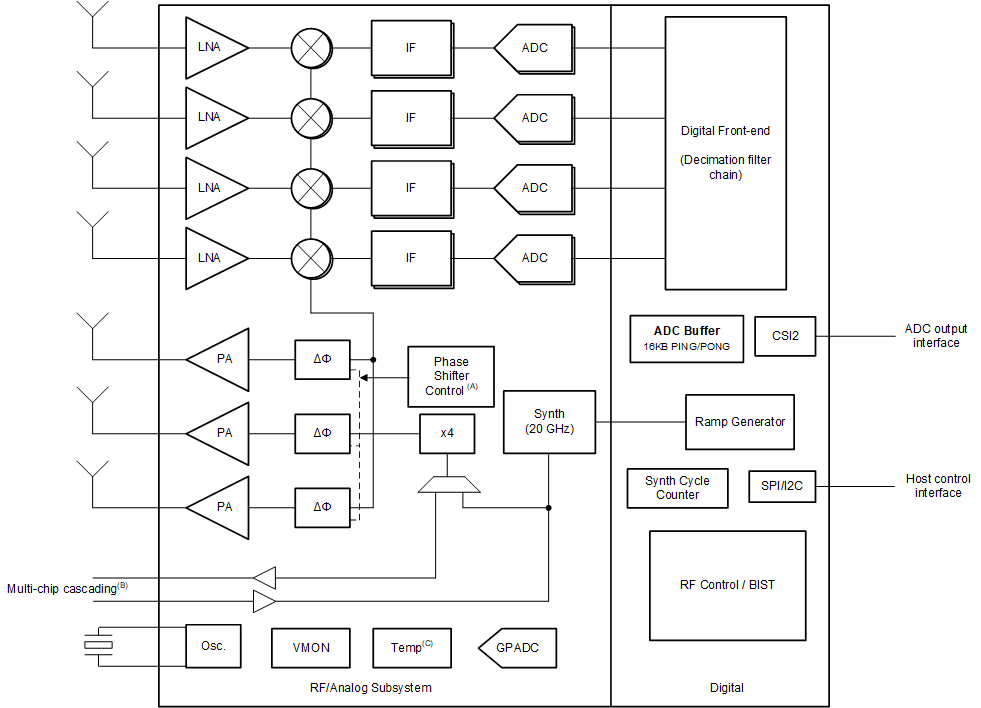 图1 TI AWR2243 Architecture
图1 TI AWR2243 Architecture
A. Phase Shift Control:
• 0° / 180° BPM
• 0° / 180° BPM and 5.625° resolution control option for AWR2243, and AWR1843
B. Multi-chip cascading feature is available in AWR2243
C. Internal temperature sensor accuracy is ± 7 °C.
射频和模拟子系统包括射频和模拟电路,即频率合成器、功率放大器 (PA)、低噪声放大器 (LNA)、混频器、中频 (IF) 和模数转换器 (ADC)。该子系统还包含晶体振荡器和温度传感器。三个发射通道可根据需要同时运行,以实现发射波束成形;而四个接收通道则均可同时运行。AWR2243 器件支持 3 个发射器同时运行。
发射子系统
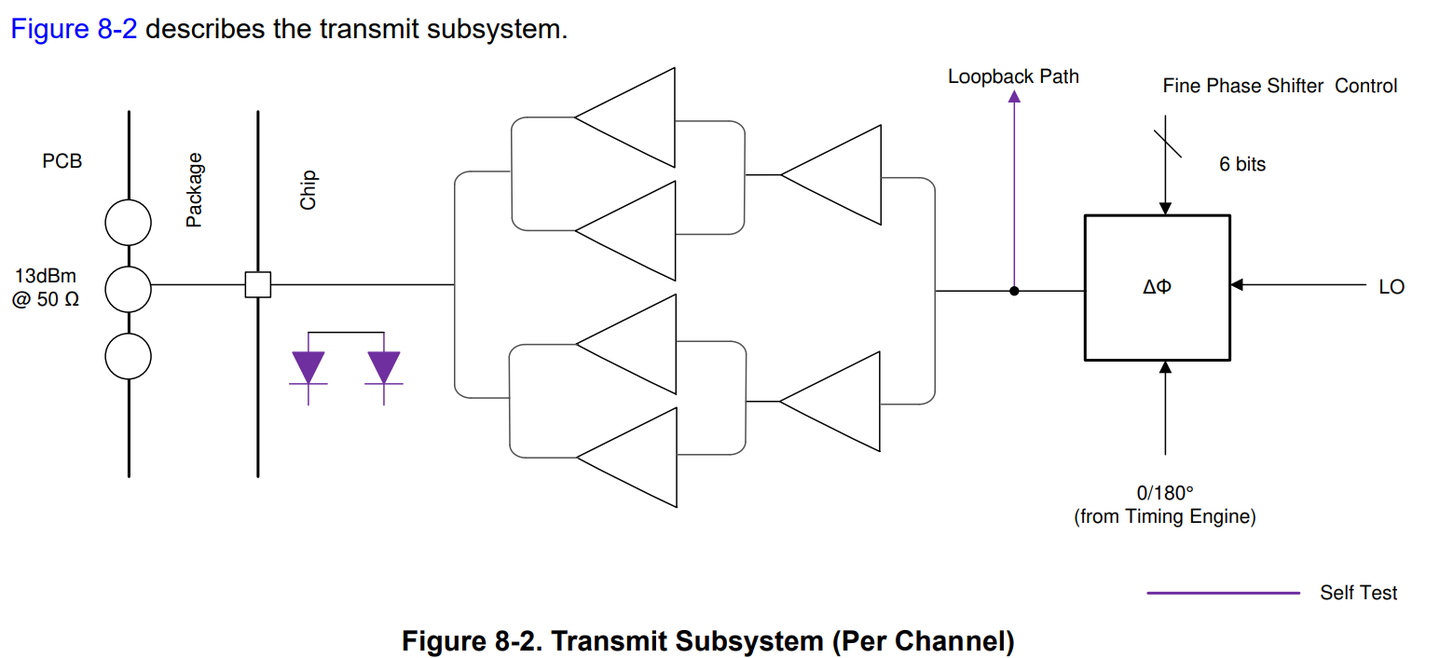 图2 发射子系统
图2 发射子系统
AWR2243 发射子系统由三个并行发射链组成,每个发射链均具有独立的相位和幅度控制。这三个发射链可以同时使用,也可以以时分复用的方式使用。该器件支持二进制相位调制,用于 MIMO 雷达和干扰抑制。对于 AWR2243,额外的移相器与发射通道关联,并且可以根据每个线性调频信号进行编程。每个发射链可在 PCB 上的天线端口提供最大 13 dBm 的功率。发射链还支持可编程退避,以优化系统。
接收子系统
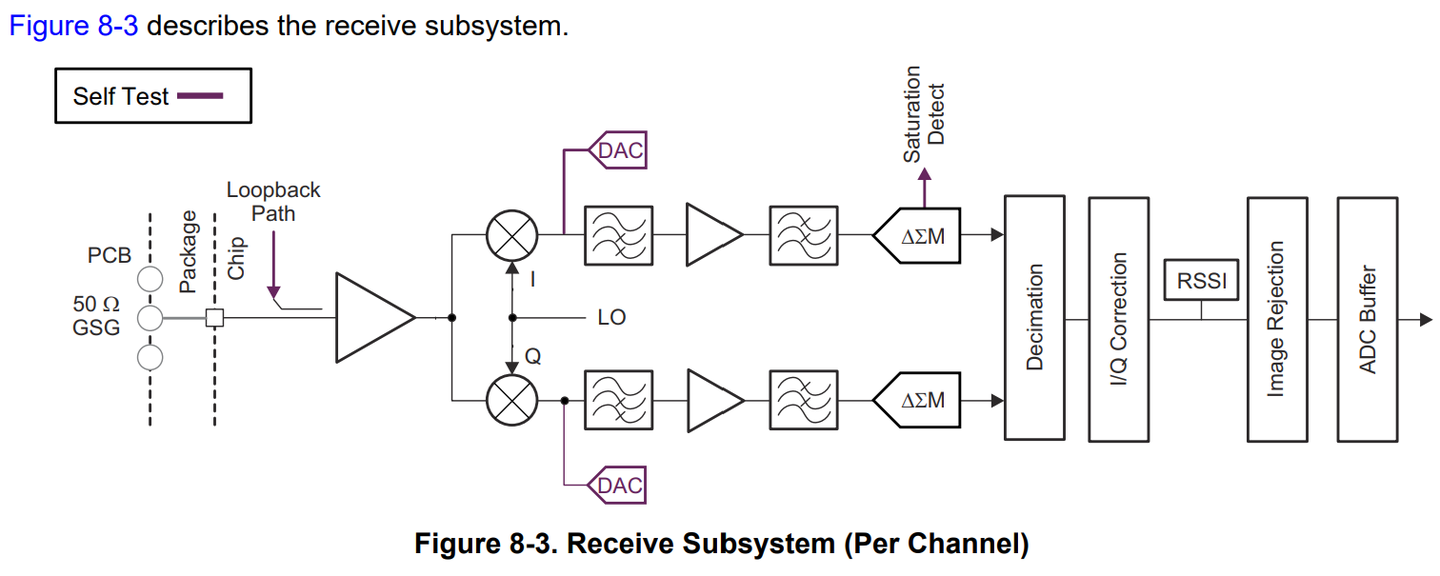 图3 接收子系统
图3 接收子系统
AWR2243 接收子系统由四个并行通道组成。单个接收通道包含低噪声放大器 (LNA)、混频器、中频滤波、ADC 转换和抽取电路。所有四个接收通道均可同时运行,并提供单独的断电选项以优化系统。与传统的纯实数接收器不同,AWR2243 器件支持复杂的基带架构,该架构采用正交混频器以及双中频和 ADC 链,为每个接收通道提供复杂的 I 和 Q 输出。AWR2243 专为快速线性调频系统而设计。带通中频链具有可配置的 175 kHz 以上的下截止频率,并可支持高达 20 MHz 的带宽。
频综子系统
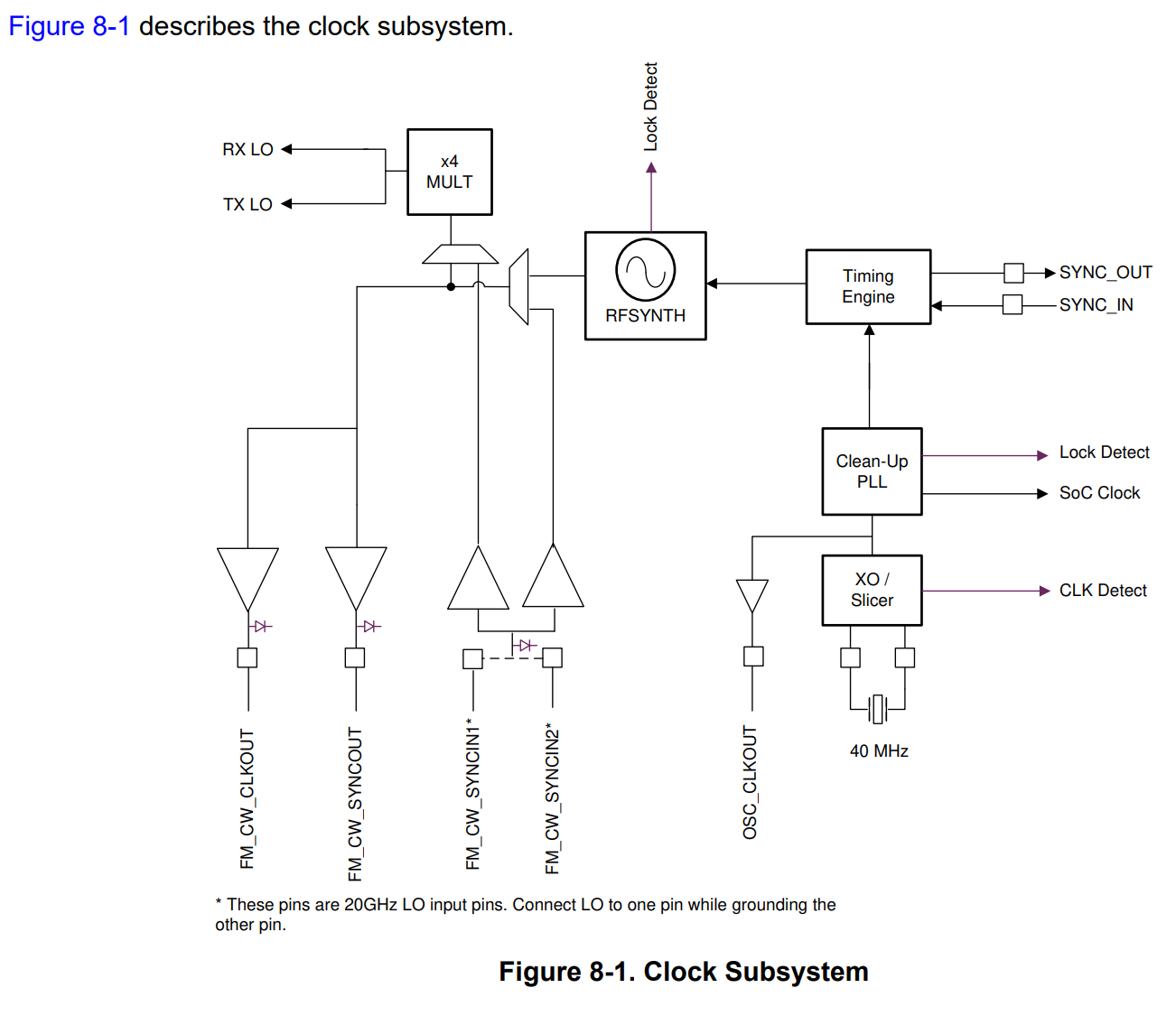 图4 频综子系统
图4 频综子系统
AWR2243 时钟子系统利用 40 MHz 晶振作为输入参考,生成 76 至 81 GHz 的频率。它内置振荡器电路,后接净化锁相环 (PLL) 和射频合成器电路。射频合成器的输出经过 4 倍频器处理,在 76 至 81 GHz 频谱范围内产生所需的频率。射频合成器的输出由时序引擎模块调制,以创建传感器有效工作所需的波形。射频合成器的输出可在器件引脚边界处获取,用于多芯片级联配置。净化锁相环 (PLL) 还在系统唤醒后为主处理器提供参考时钟。时钟子系统还内置了用于检测晶振存在和监控生成时钟质量的机制。
通信接口
AWR2243 设备通过以下主要接口与主机雷达处理器通信:
• 参考时钟 -- 设备唤醒后,主机处理器可用的参考时钟
• 控制 -- 用于主机控制的 4 端口标准 SPI(从机或 I2C),以及用于异步事件的 HOST INTR 引脚。所有无线电控制命令(和响应)都通过此接口传输。
• 数据 -- 遵循 MIPI CSI2 格式的高速串行端口。四个数据通道和一个时钟通道(均为差分通道)。
来自不同接收通道的数据可以在单个数据通道上复用,以优化电路板布线。这是一个仅用于数据传输的单向接口。
• 复位 -- 用于从主机唤醒设备的低电平有效复位
• 带外中断
• 错误 -- 用于在无线电控制器检测到故障时通知主机
ADC采样后数据输出
AWR2243 设备使用基于 MIPI D-PHY / CSI2 的格式将原始 ADC 样本传输到外部 MCU。如下图所示。
• 支持四条数据通道
• CSI-2 数据速率可扩展至每通道 150 Mbps 至 600 Mbps
• 基于虚拟通道
• CRC 生成
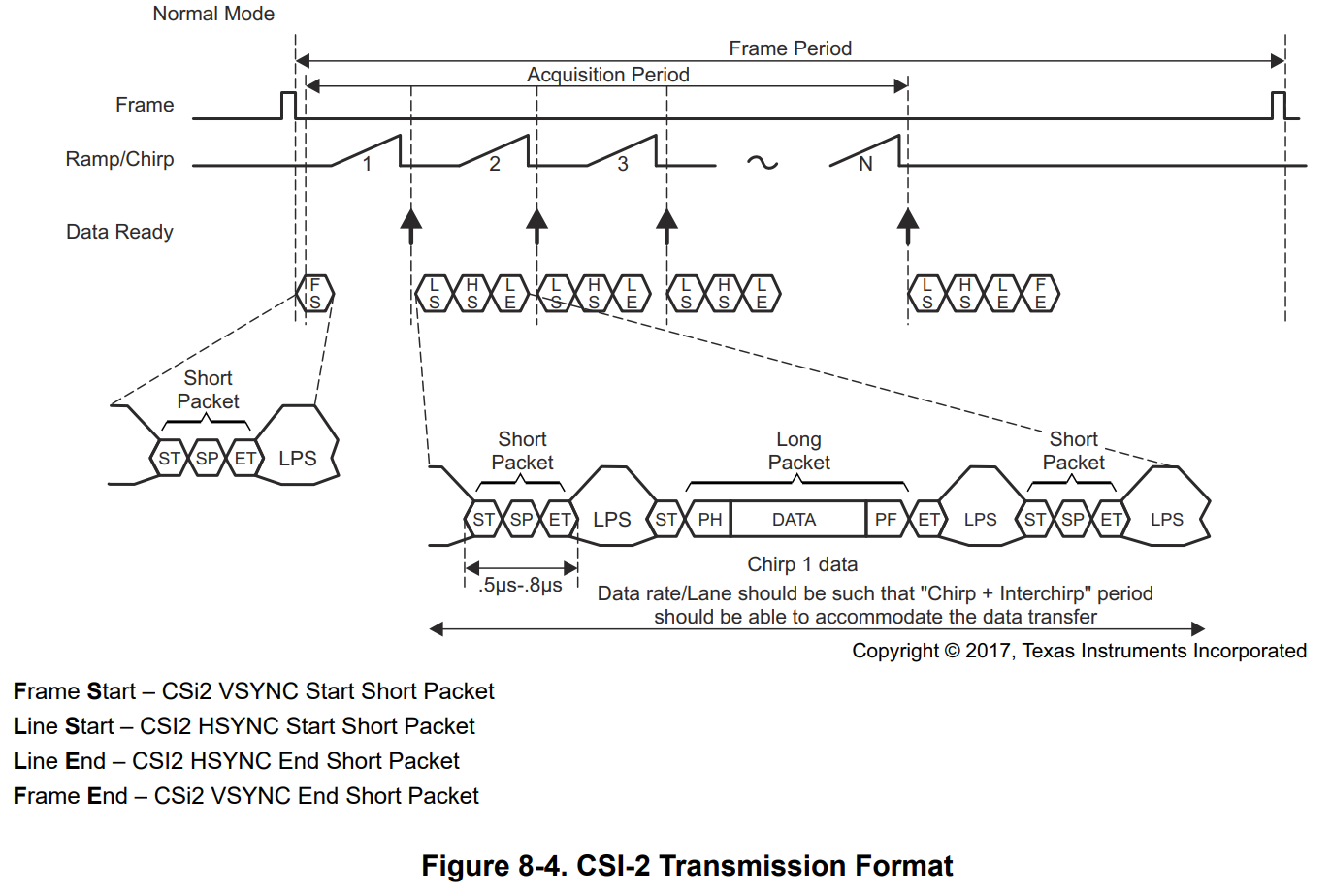 图5 ADC采样输出后通过CSI输出格式
图5 ADC采样输出后通过CSI输出格式
数据有效载荷由以下三类信息构成:
• 线性调频脉冲轮廓信息
• 实际线性调频脉冲数
• 对应于所有四个通道线性调频脉冲的 ADC 数据 -- 交织方式
• 线性调频脉冲质量数据(可配置)
然后,有效载荷被分配到四个物理数据通道,并传输到接收 D-PHY。
监控与诊断机制
此与功能安全相关,后续篇章专门论述。
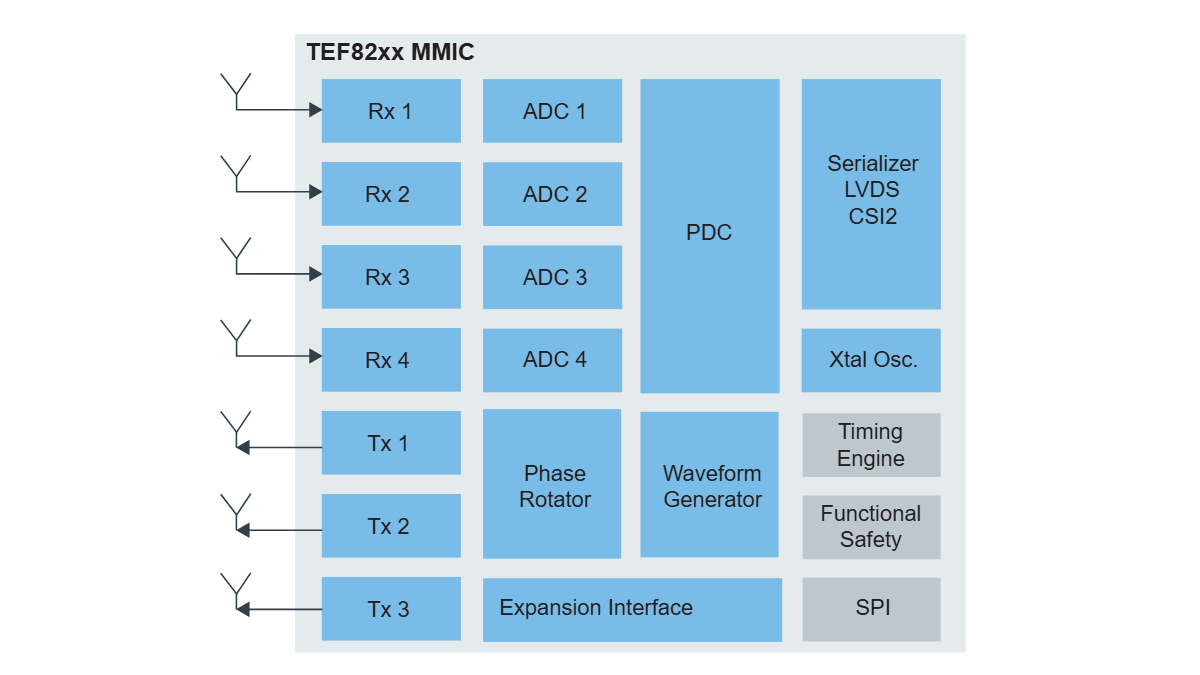 图6 TEF82xx 77 GHz Automotive Radar Transceiver
图6 TEF82xx 77 GHz Automotive Radar Transceiver
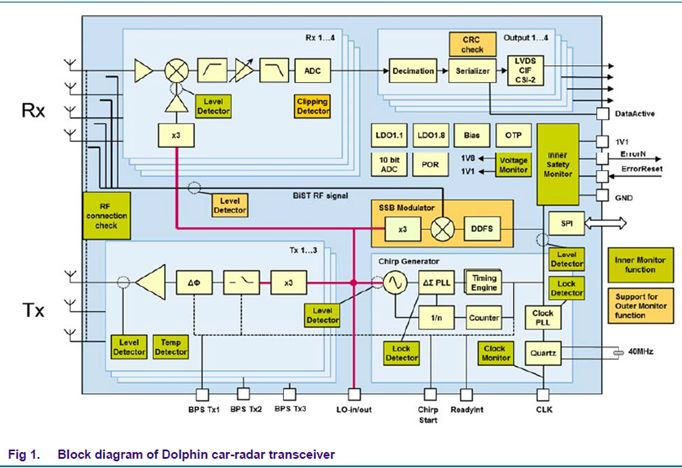 图7 NXP Dolphin Radar Transceiver
图7 NXP Dolphin Radar Transceiver
NXP的MMIC芯片整体架构和TI的类似,如上图所示。
下图为MMIC芯片内部收发架构的一种更可视化的展示,和当前MMIC系统唯一不同的是,当前Tx和Rx没有开关切换,都是几路天线就配几路收发通道。
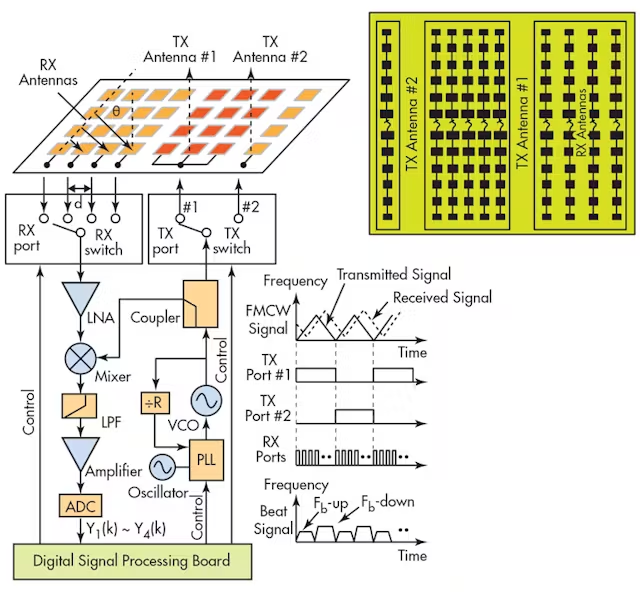 图8 MMIC内部架构图
图8 MMIC内部架构图
2、基于MMIC构建完整雷达系统
典型应用包括采用该雷达前端和外部可编程 MCU 的标准短程、中程、长程和高性能成像雷达应用。下图展示了短程、中程或长程雷达应用。
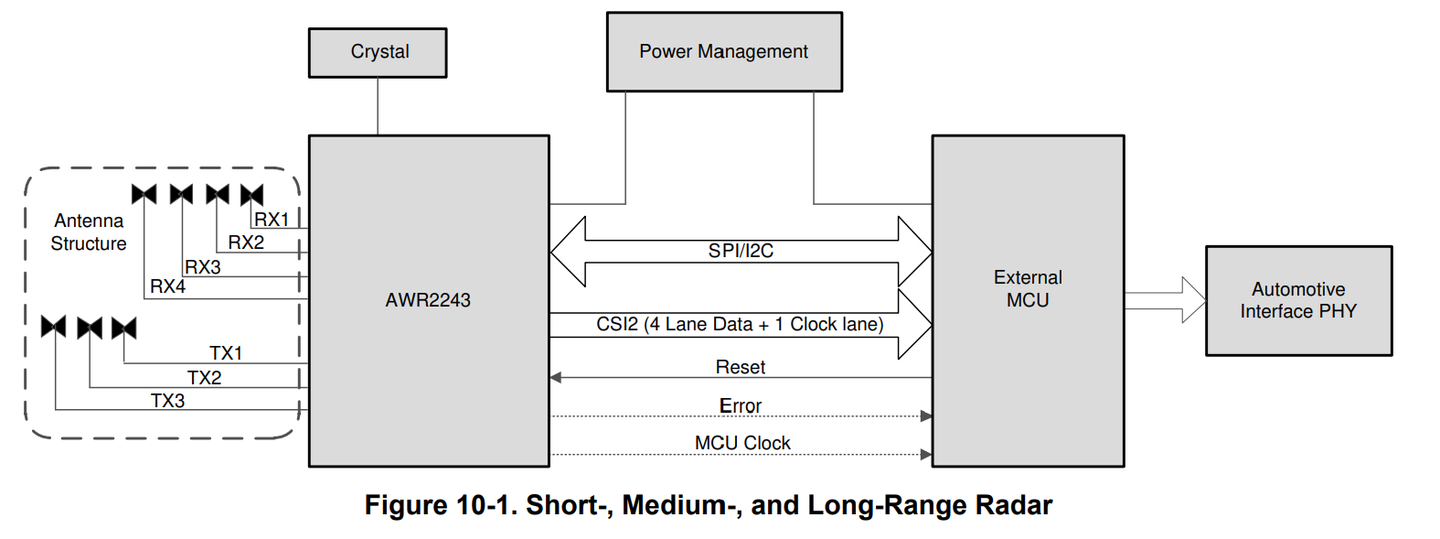 图9 短、中、长距3D雷达实现方案
图9 短、中、长距3D雷达实现方案
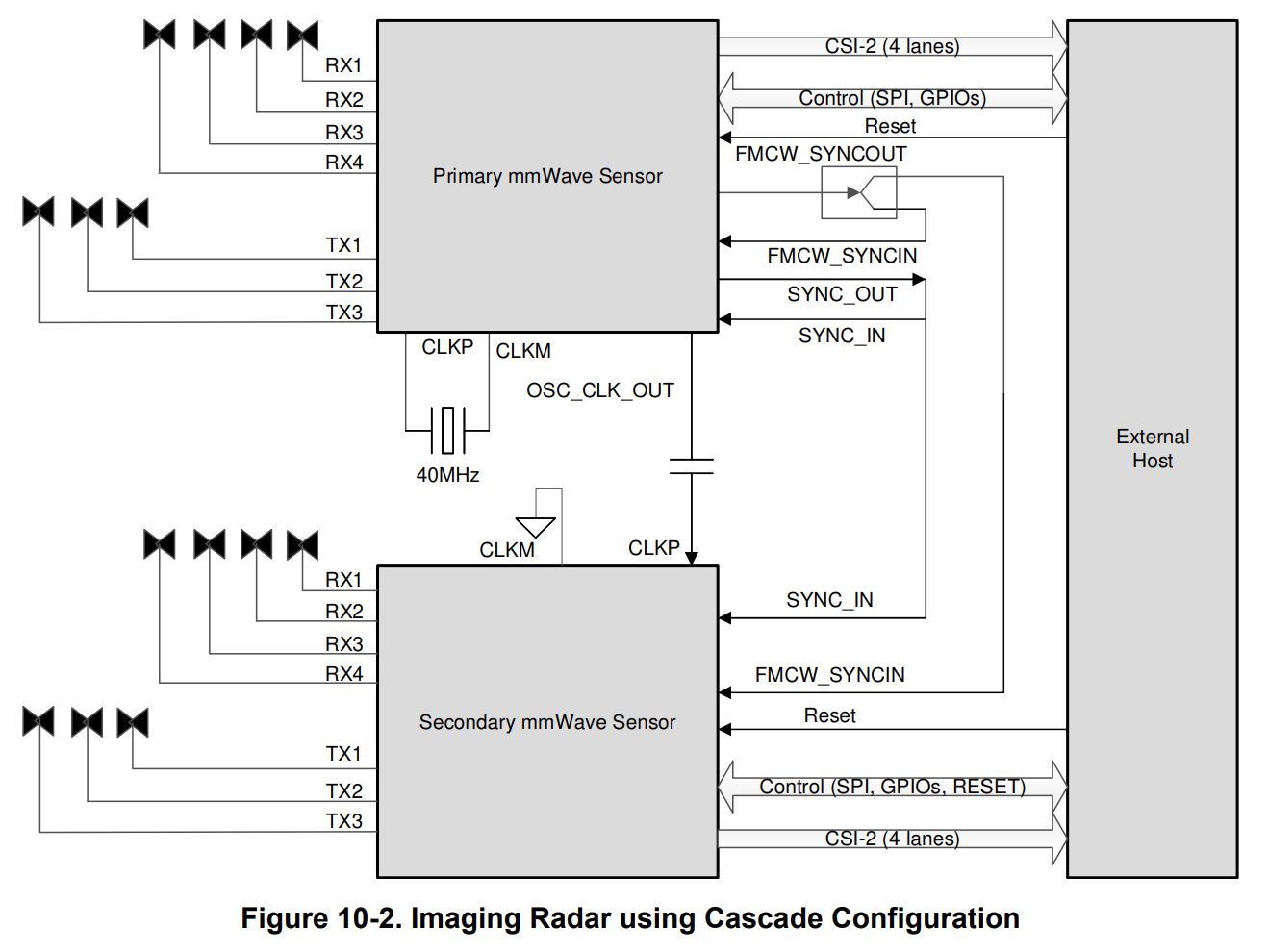 图10 4D雷达实现方案
图10 4D雷达实现方案