【导读】
在工业质检场景中,AI 异常检测已成为"智能工厂"的必备技术。然而现实中,零部件缺陷往往细微、复杂且多变,传统方法难以在保证效率的同时做到精准识别。近期在ICML 2025上提出的 CostFilter-AD 模型,提供了一种全新的解决思路:通过引入"匹配代价过滤(Cost Volume Filtering)",显著提升了多类别异常检测的准确率和稳定性。本文将带你走进这一方法的创新点与实验成果。
研究背景
无监督异常检测(UAD)在工业质检中尤为重要。它只依赖正常样本进行训练,在推理阶段需要识别未知的缺陷。
现有方法主要分为两类:
- 重建式方法: 利用UNet、Transformer或 Diffusion 模型重建正常图像,再通过残差发现异常。但问题在于,重建过程可能残留异常或引入伪影。
- 嵌入式方法: 利用预训练特征模型建立正常分布,偏离即视为异常。但这往往需要庞大的特征库,计算与存储开销巨大。
结果是:当应用到多类别场景时,模型容易出现"匹配噪声"(Matching Noise),导致边界模糊、误检漏检。
核心思路:CostFilter-AD 如何解决"匹配噪声"
在无监督异常检测(UAD)中,一个关键挑战是匹配噪声(Matching Noise) 。
- 为什么会有这种噪声?
- 重建方法: 重建出来的图像可能仍然带有异常,或者重建细节偏移,导致对比结果含有伪影。
- 嵌入方法: 不同视角、不同纹理的正常样本本身存在差异,特征匹配时容易"把正常当异常"。
传统方法大多直接使用L2 距离或余弦相似度来衡量输入与模板的差异,但这样无法有效过滤掉噪声信号,结果就是边界模糊、误报率高。
CostFilter-AD 的核心突破 ,就是引入匹配代价过滤(Cost Volume Filtering) 的思想,把"怎么对齐"从一个单纯的计算问题,变成一个可学习的过滤过程。
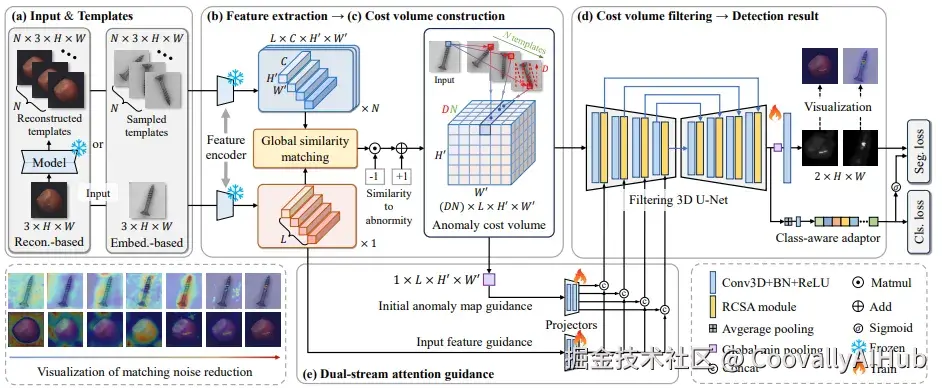
具体包括三个关键步骤:
- 特征提取
- 使用预训练特征提取器(DINO 等),从输入图像和模板(可以是重建图像或正常样本)中提取多层特征。
- 多层特征保证了既能捕捉到整体轮廓,也能保留细粒度细节。
- 匹配代价体构建
将输入特征与模板特征逐点匹配,形成一个三维结构:
- 两个维度对应空间位置,
- 一个维度表示匹配分数。
这就像给每个像素配了一个"匹配候选池",候选值越大,表示该区域越可能是异常。
- 代价体过滤
- 使用 3D U-Net + 通道-空间注意力(RCSA 模块) ,对代价体进行逐层过滤。
- 输入特征用来保留边缘细节,初始异常图用来指导注意力聚焦。
- 这样既能压制大范围的假异常,又能放大细微的真实缺陷(比如边缘裂痕、低对比度刮痕)。
- 创新点总结:
把异常检测问题转化为匹配代价 + 学习过滤的过程;
提出了双流注意力机制(Dual-stream Attention) ,同时兼顾全局匹配与局部精细边界;
能与任意重建式或嵌入式方法结合,作为一个通用插件使用。

实验与结果:跨数据集验证的全面提升
为了验证 CostFilter-AD 的有效性,作者在多个工业质检公开数据集上进行了系统实验:
- MVTec-AD: 涵盖 15 类工业物体与纹理缺陷;
- VisA: 包含更复杂的结构异常和表面瑕疵;
- MPDD、BTAD: 金属零件和多样化工业场景。
- 定量结果
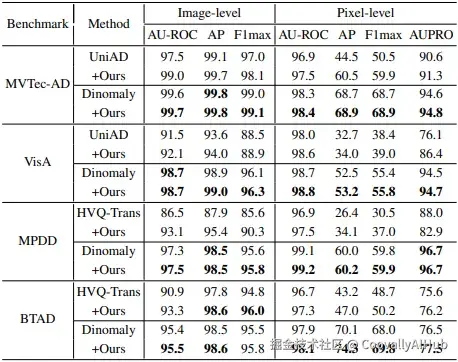
在所有数据集上,CostFilter-AD 都显著提升了性能:
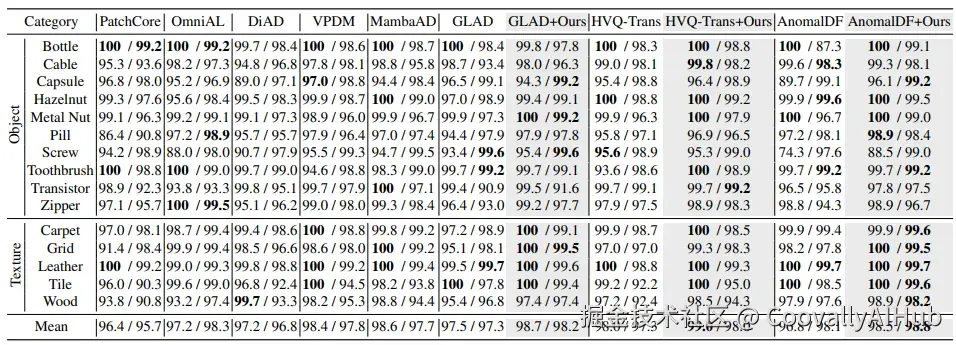
MVTec-AD
- 与 GLAD、HVQ-Trans、AnomalDF 等基线对比,图像级 AUROC 提升 1% 左右,像素级 AUROC 提升 0.7% 左右。
- 在纹理类(如 Grid)上提升最明显,高达 4.9%。
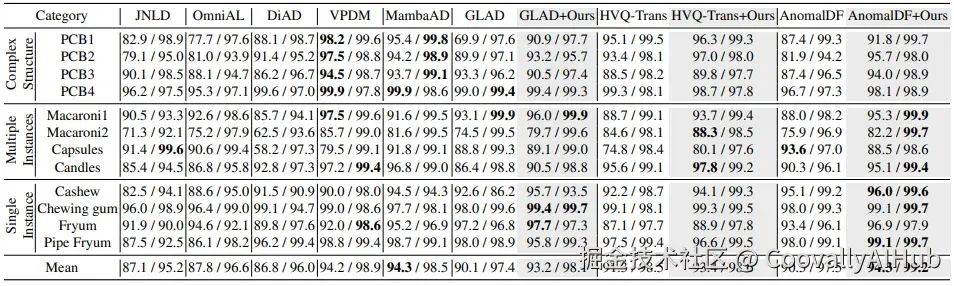
VisA
- 面对结构复杂、异常多样的挑战,仍然稳定提升:图像级 AUROC 提升 3.1%,像素级 AUROC 提升 1.7%。
跨多数据集
- 无论Diffusion、Transformer,还是Embedding 方法,加入 CostFilter-AD 后均实现一致增益。
- 在 MPDD、BTAD 这些更小、更难的数据集上,提升更为显著。
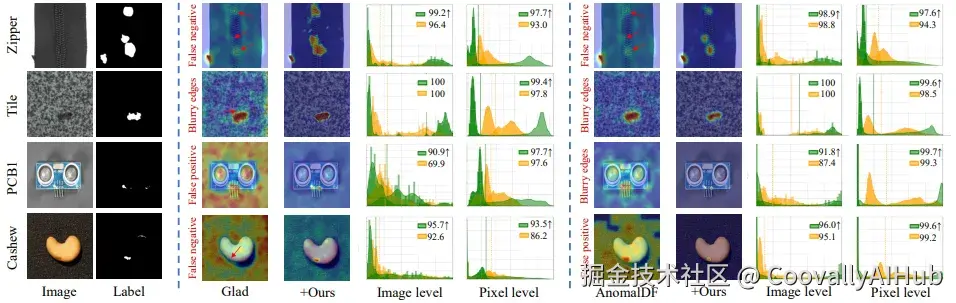
- 定性结果
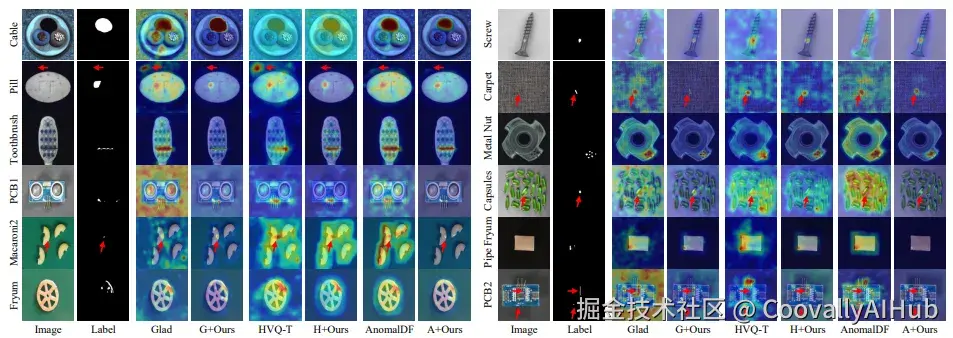
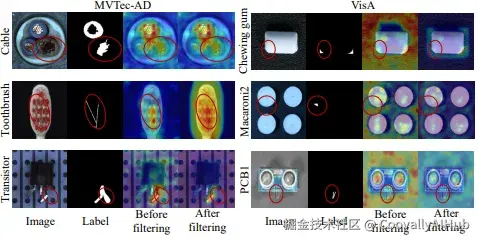
作者还给出了异常检测的可视化对比:
基线方法经常出现边界模糊或大面积误报,比如:
- PCB 板上检测不准,漏掉裂痕;
- 胶囊表面异常边缘被模糊化。
CostFilter-AD 能显著减少误检,异常区域更加贴合实际。
- 消融实验与分析
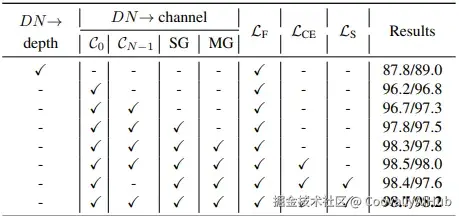
证明双流注意力机制与多损失设计都显著提升性能。
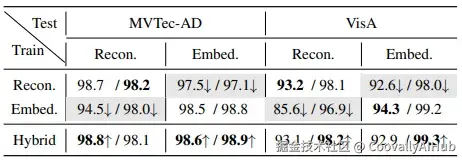
说明该方法既能适配重建式,也能适配嵌入式模板,混合训练(Hybrid)效果最佳。
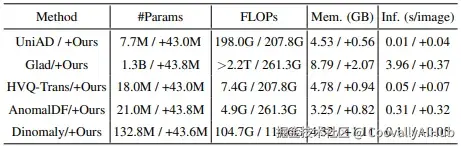
展示了效率对比。虽然引入了额外计算,但参数量和显存占用增加有限,推理速度仍保持在可接受范围。
- 失败案例
即便如此,方法仍有不足:
- 在低分辨率或缺陷过于细微的情况下,过滤后的结果可能仍存在漏检。
- 说明未来在特征提取和高分辨率建模上还有改进空间。
总结与展望
CostFilter-AD提供了一种全新的异常检测视角:
- 用"匹配代价过滤"显式解决了长期被忽视的 匹配噪声问题;
- 同时兼容重建与嵌入方法,具备良好的扩展性与通用性;
- 在多数据集、多基线下均实现 SOTA 水平,且计算效率较高。
未来,CostFilter-AD 不仅能应用于工业质检,还可扩展至 医疗影像、交通监控、无人机巡检 等更广泛场景。
- 论文地址: arxiv.org/pdf/2505.01...
- 源码地址: github.com/ZHE-SAPI/Co...
📌 想要在实际项目中复现或优化类似的异常检测方法?
在 Coovally 平台上,你可以:
- 一键加载VisA、MVTec-AD等300+开源数据集;
- 调用1000+模型算法,还可以通过 SSH 协议使用熟悉的工具远程连接 Coovally 云端算力资源,进行实时代码开发与调试;
- 快速实验研究模型,并查看可视化训练界面,清晰设置参数,监控训练过程(Loss, mAP等指标实时可视化) 。
!!点击下方链接,立即体验Coovally!!
平台链接: www.coovally.com
** **
**