目录
一、主要功能
主要功能如下:
1、LCD12864显示时间、日期、公交车车站、温度等
2、按键设置时间,显示公交车信息
3、串口播报相应站点信息
4、按键控制上行、下行、手动播报站
5、LED指示上行、下行信息
二、使用步骤
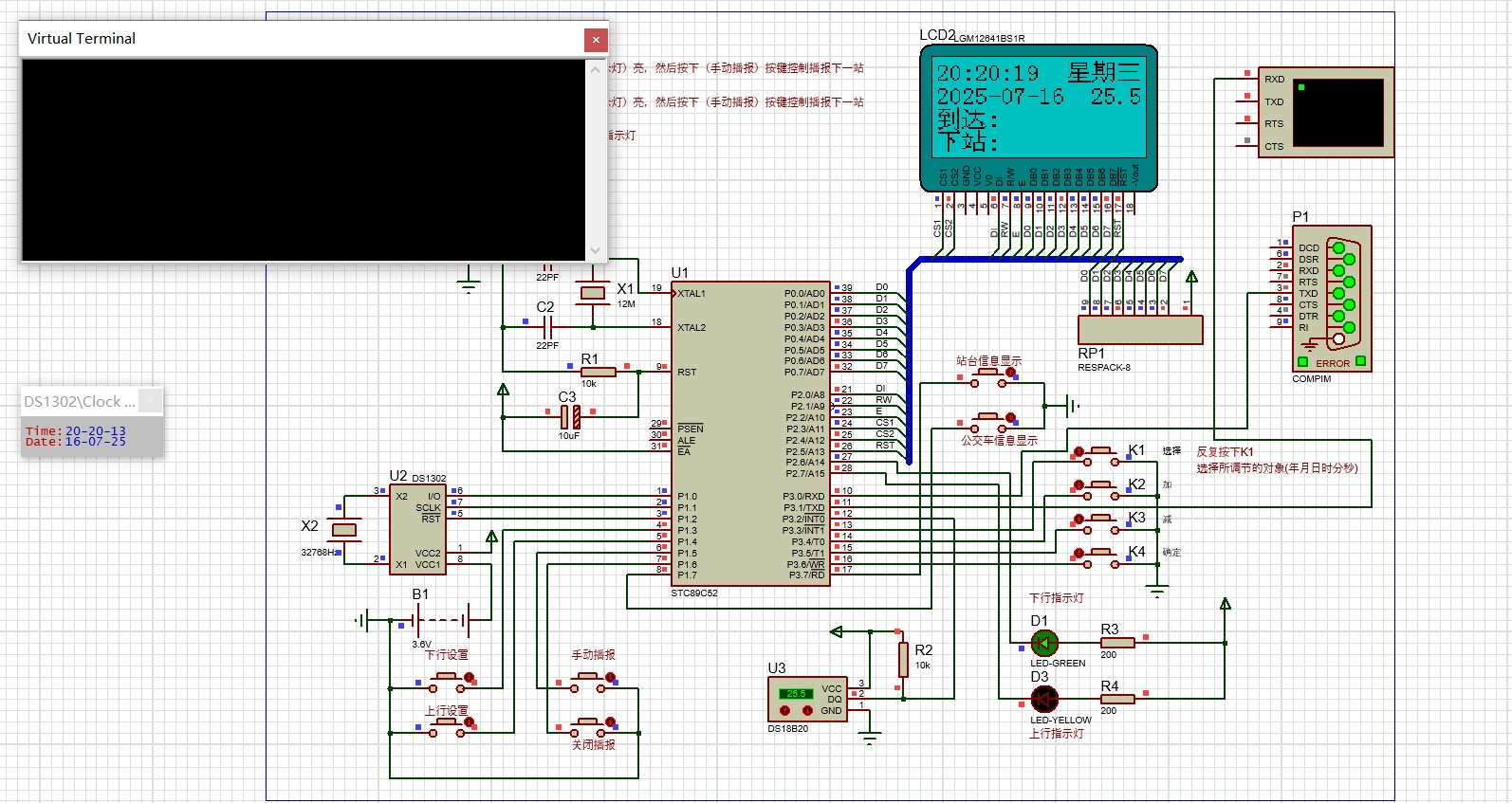
基于51单片机的公交报站系统,lcd屏幕显示时间,温度,站点信息等等,通过按键来控制对应信息报站。
三、硬件资源
1、51单片机核心模块
2、按键模块
3、温度传感器
4、蜂鸣器模块
5、时钟模块
6、LCD12864显示模块
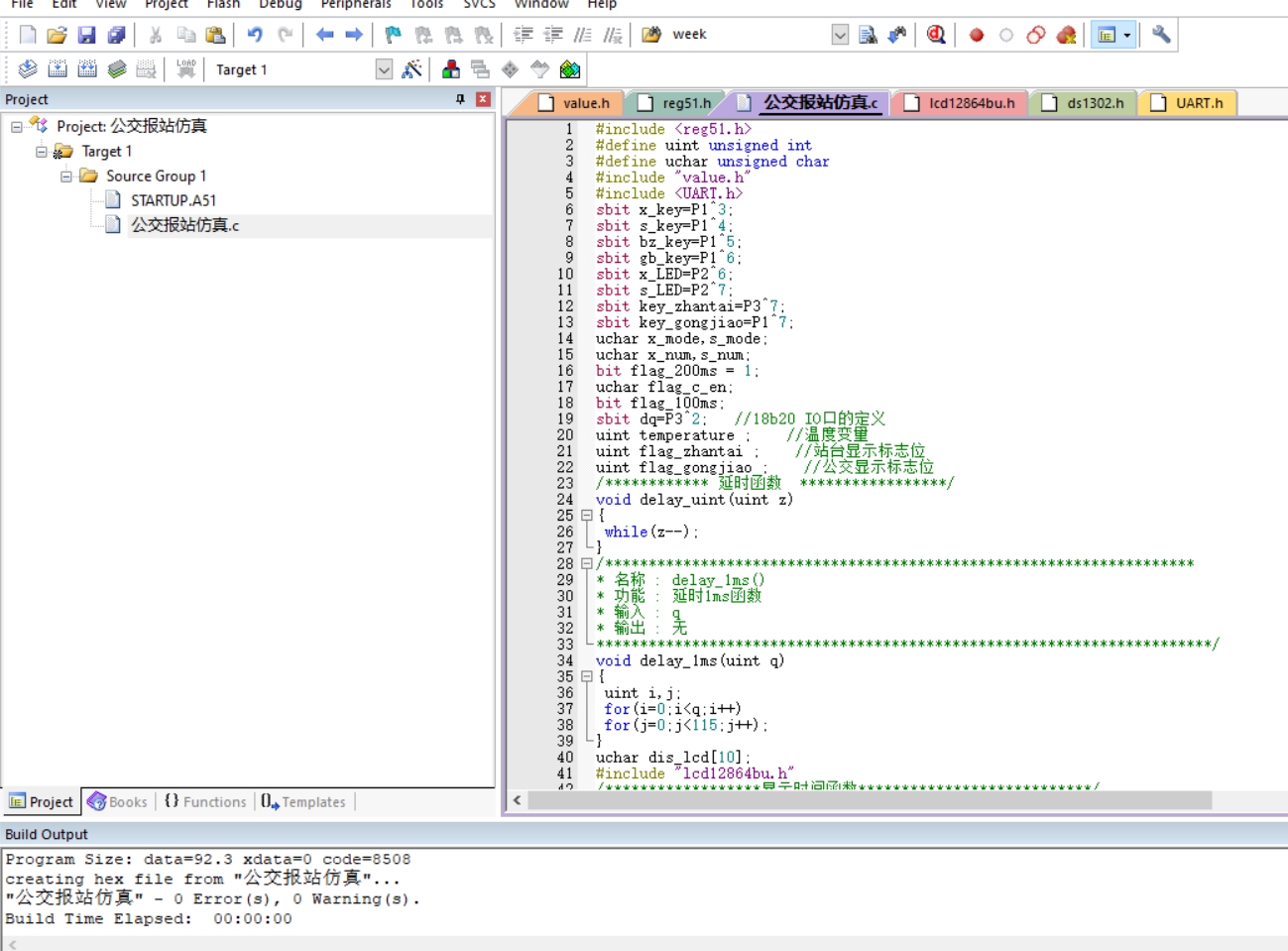
四、软件设计
#include <reg51.h>
#define uint unsigned int
#define uchar unsigned char
#include "value.h"
#include <UART.h>
sbit x_key=P1^3;
sbit s_key=P1^4;
sbit bz_key=P1^5;
sbit gb_key=P1^6;
sbit x_LED=P2^6;
sbit s_LED=P2^7;
sbit key_zhantai=P3^7;
sbit key_gongjiao=P1^7;
uchar x_mode,s_mode;
uchar x_num,s_num;
bit flag_200ms = 1;
uchar flag_c_en;
bit flag_100ms;
sbit dq=P3^2; //18b20 IO口的定义
uint temperature ; //温度变量
uint flag_zhantai ; //站台显示标志位
uint flag_gongjiao ; //公交显示标志位
/************ 延时函数 *****************/
void delay_uint(uint z)
{
while(z--);
}
/********************************************************************
* 名称 : delay_1ms()
* 功能 : 延时1ms函数
* 输入 : q
* 输出 : 无
***********************************************************************/
void delay_1ms(uint q)
{
uint i,j;
for(i=0;i<q;i++)
for(j=0;j<115;j++);
}
uchar dis_lcd10;
#include "lcd12864bu.h"
/******************显示时间函数***************************/
void dis_shijian() //显示时间
{
write_shu16(0,0*8,shi,0);
write_shuzi(1,0*2,2*8,fuhao1,0);
write_shu16(0,3*8,fen,0);
write_shuzi(1,0*2,5*8,fuhao1,0);
write_shu16(0,6*8,miao,0);
write_yhanzi(2,0,5*16,qita6-1); //星期
//write_shu16(0,14*8,week,0);
if(week==0)
{
write_yhanzi(1,0,7*16,xingqi0);
}
if(week==1)
{
write_yhanzi(1,0,7*16,xingqi1);
}
if(week==2)
{
write_yhanzi(1,0,7*16,xingqi2);
}
if(week==3)
{
write_yhanzi(1,0,7*16,xingqi3);
}
if(week==4)
{
write_yhanzi(1,0,7*16,xingqi4);
}
if(week==5)
{
write_yhanzi(1,0,7*16,xingqi5);
}
if(week==6)
{
write_yhanzi(1,0,7*16,xingqi6);
}
write_shu16(1*2,0*8,0x20,0);
write_shu16(1*2,2*8,nian,0);
write_shuzi(1,1*2,4*8,fuhao0,0);
write_shu16(1*2,5*8,yue,0);
write_shuzi(1,1*2,7*8,fuhao0,0);
write_shu16(1*2,8*8,ri,0);
write_shu18b20(1*2,12*8,temperature,0);
write_shuzi(1,1*2,14*8,dian,0);
}
/************初始化显示*****************/
void init_12864_dis() //初始化显示
{
cs1=1; //左屏开显示
cs2=0;
dis_shijian(); //显示时间
}
/***********************18b20初始化函数*****************************/
void init_18b20()
{
bit q;
dq=1; //把总线拿高
delay_uint(1); //15us
dq=0; //给复位脉冲
delay_uint(80); //750us
dq=1; //把总线拿高 等待
delay_uint(10); //110us
q=dq; //读取18b20初始化信号
delay_uint(20); //200us
dq=1; //把总线拿高 释放总线
}
/*************写18b20内的数据***************/
void write_18b20(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{ //写数据是低位开始
dq=0; //把总线拿低写时间隙开始
dq=dat&0x01; //向18b20总线写数据了
delay_uint(5); // 60us
dq=1; //释放总线
dat>>=1;
}
}
/*************读取18b20内的数据***************/
uchar read_18b20()
{
uchar i,value;
for(i=0;i<8;i++)
{
dq=0; //把总线拿低读时间隙开始
value>>= 1; //读数据是低位开始
dq=1; //释放总线
if(dq==1) //开始读写数据
value|=0x80;
delay_uint(5); //60us 读一个时间隙最少要保持60us的时间
}
return value; //返回数据
}
/*************读取温度的值 读出来的是小数***************/
uint read_temp()
{
uint value;
uchar low; //在读取温度的时候如果中断的太频繁了,就应该把中断给关了,否则会影响到18b20的时序
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0x44); //启动一次温度转换命令
delay_uint(50); //500us
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0xbe); //发出读取暂存器命令
EA=0;
low=read_18b20(); //读温度低字节
value=read_18b20(); //读温度高字节
EA =1;
value<<=8; //把温度的高位左移8位
value|=low; //把读出的温度低位放到value的低八位中
value*=0.625; //转换到温度值 小数
return value; //返回读出的温度 带小数
}
/******************显示时间函数***************************/
void dis_shijian_set() //显示时间
{
write_shu16(0*2,0*8,0x20,0);
write_shu16(1*2,2*8,shi,0);
write_shu16(1*2,6*8,fen,0);
write_shu16(1*2,10*8,miao,0);
write_shu16(0*2,2*8,nian,0);
write_shu16(0*2,6*8,yue,0);
write_shu16(0*2,10*8,ri,0);
write_yhanzi(1,4,5*16,xingqiweek);
}
/******************时间芯片显示函数**********************/
void ds1302_dis()
{
uchar miao_1;
if(menu_1 == 0)
{
read_time();
if(miao_1 != miao)
{
miao_1 = miao;
dis_shijian(); //显示时间
}
}
}
/********************独立按键程序*****************/
uchar key_can; //按键值
void key() //独立按键程序
{
static uchar key_new;
key_can=20; //按键值还原
P3|=0x78; //对应的按键IO口输出为1
if((P3&0x78)!=0x78) //按键按下
{
delay_1ms(1); //按键消抖动
if(((P3&0x78)!=0x78)&&(key_new==1))
{ //确认是按键按下
key_new=0;
switch(P3&0x78)
{
case 0x70:key_can=1;break; //得到按键值
case 0x68:key_can=2;break; //得到按键值
case 0x58:key_can=3;break; //得到按键值
case 0x38:key_can=4;break; //得到按键值
}
}
}
else
key_new=1;
}
/**********************设置函数************************/
void key_with()
{
if(key_can==4) //退出键
{
qingling();
init_12864_dis(); //初始化显示
flag_200ms=1;
menu_1=0;
}
if(key_can==1) //设置键
{
menu_1 ++;
flag_200ms=1;
if(menu_1==1)
{
x_num=0;
s_num=0;
x_mode=0;
s_mode=0;
qingling();
init_12864_set1();
}
if(menu_1>7)
menu_1 = 1;
}
if(menu_1!=0)
{
if(menu_1==1) //设置年
{
if(key_can==2) //加
set_ds1302time(1,&nian,0x99);
if(key_can==3) //减
set_ds1302time(0,&nian,0x99);
}
if(menu_1==2) //设置月
{
if(key_can==2) //加
set_ds1302time(1,&yue,0x13);
if(key_can==3) //减
set_ds1302time(0,&yue,0x13);
}
if(menu_1==3) //设置日
{
if(key_can==2) //加
set_ds1302time(1,&ri,0x32);
if(key_can==3) //减
set_ds1302time(0,&ri,0x32);
}
if(menu_1==4) //设置时
{
if(key_can==4) //加
set_ds1302time(1,&shi,0x24);
if(key_can==3) //减
set_ds1302time(0,&shi,0x24);
}
if(menu_1==5) //设置分
{
if(key_can==2) //加
set_ds1302time(1,&fen,0x60);
if(key_can==3) //减
set_ds1302time(0,&fen,0x60);
}
if(menu_1==6) //设置秒
{
if(key_can==2) //加
set_ds1302time(1,&miao,0x60);
if(key_can==3) //减
set_ds1302time(0,&miao,0x60);
}
if(menu_1==7) //设置星期
{
if(key_can==2) //加
set_ds1302time(1,&week,0x8);
if(key_can==3) //减
set_ds1302time(0,&week,0x8);
}
dis_shijian_set(); //显示时间
switch(menu_1) // 光标显示
{
case 1:write_shu16(0*2,2*8,nian,1);break;
case 2:write_shu16(0*2,6*8,yue,1);break;
case 3:write_shu16(0*2,10*8,ri,1);break;
case 4:write_shu16(1*2,2*8,shi,1);break;
case 5:write_shu16(1*2,6*8,fen,1);break;
case 6:write_shu16(1*2,10*8,miao,1);break;
case 7:write_yhanzi(1,4,5*16,xingqiweek);break;
}
write_time(); //把时间写进去
}
}
/*********************定时器0、定时器1初始化******************/
void time0_init()
{
EA=1; //开总中断
TMOD=0X11; //定时器0、定时器1工作方式1
ET0=1; //开定时器0中断
TR0=1; //允许定时器0定时
}
void baozhan()
{
if(key_zhantai==0)
{
delay_1ms(20);
if(key_zhantai==0)
{
qingling();
x_mode=1;
s_mode=0;
x_num=0;
s_num=0;
x_LED=0;
s_LED=0;
write_yhanzi(1,4,0*16,yihaozhan0); //一
write_yhanzi(1,4,1*16,yihaozhan1); //号
write_yhanzi(1,4,2*16,yihaozhan2); //站
write_yhanzi(1,4,4*16,erhaozhan0); //二
write_yhanzi(1,4,5*16,erhaozhan1); //号
write_yhanzi(1,4,6*16,erhaozhan2); //站
write_yhanzi(1,6,0*16,sanhaozhan0); //三
write_yhanzi(1,6,1*16,sanhaozhan1); //号
write_yhanzi(1,6,2*16,sanhaozhan2); //站
write_yhanzi(1,6,4*16,sinhaozhan0); //四
write_yhanzi(1,6,5*16,sinhaozhan1); //号
write_yhanzi(1,6,6*16,sinhaozhan2); //站
}
while(!key_zhantai);
}
if(x_key==0 || key_gongjiao==0)
{
delay_1ms(20);
if(x_key==0 || key_gongjiao==0)
{
qingling();
x_mode=1;
s_mode=0;
x_num=0;
s_num=0;
x_LED=0;
s_LED=1;
write_yhanzi(1,4,0*16,daoda0); //到
write_yhanzi(1,4,1*16,daoda1); //达
write_shuzi(1,2*2,4*8,fuhao1,0);//:
write_yhanzi(1,6,0*16,xiayizhan0); //下
write_yhanzi(1,6,1*16,xiayizhan1); //站
write_shuzi(1,3*2,4*8,fuhao1,0); //:
}
while((!x_key) || (!key_gongjiao));
}
if(s_key==0 || key_gongjiao==0)
{
delay_1ms(20);
if(s_key==0 || key_gongjiao==0)
{
qingling();
x_mode=0;
s_mode=1;
x_num=0;
s_num=0;
x_LED=1;
s_LED=0;
write_yhanzi(1,4,0*16,daoda0); //到
write_yhanzi(1,4,1*16,daoda1); //达
write_shuzi(1,2*2,4*8,fuhao1,0);//:
write_yhanzi(1,6,0*16,xiayizhan0); //下
write_yhanzi(1,6,1*16,xiayizhan1); //站
write_shuzi(1,3*2,4*8,fuhao1,0); //:
}
while((!s_key) || (!key_gongjiao));
}
if((bz_key==0)&&(x_mode==1))
{
delay(20);
if((bz_key==0)&&(x_mode==1))
{
x_num++;
x_num%=6;
}
while(!bz_key);
}
if((bz_key==0)&&(s_mode==1))
{
delay(20);
if((bz_key==0)&&(s_mode==1))
{
s_num++;
s_num%=6;
}
while(!bz_key);
}
if(gb_key==0)
{
delay_1ms(20);
if(gb_key==0)
{
x_mode=0;
s_mode=0;
x_num=0;
s_num=0;
x_LED=1;
s_LED=1;
qingling();
}
}
}
void yuyin()
{
/******************************下行报站显示***********/
if(x_num==1)
{
write_yhanzi(1,4,3*16,yihaozhan0); //一
write_yhanzi(1,4,4*16,yihaozhan1); //号
write_yhanzi(1,4,5*16,yihaozhan2); //站
write_yhanzi(1,6,3*16,erhaozhan0); //二
write_yhanzi(1,6,4*16,erhaozhan1); //号
write_yhanzi(1,6,5*16,erhaozhan2); //站
delay(500);
}
if(x_num==2)
{
write_yhanzi(1,4,3*16,erhaozhan0); //二
write_yhanzi(1,4,4*16,erhaozhan1); //号
write_yhanzi(1,4,5*16,erhaozhan2); //站
write_yhanzi(1,6,3*16,sanhaozhan0); //三
write_yhanzi(1,6,4*16,sanhaozhan1); //号
write_yhanzi(1,6,5*16,sanhaozhan2); //站
}
if(x_num==3)
{
write_yhanzi(1,4,3*16,sanhaozhan0); //三
write_yhanzi(1,4,4*16,sanhaozhan1); //号
write_yhanzi(1,4,5*16,sanhaozhan2); //站
write_yhanzi(1,6,3*16,sinhaozhan0); //四
write_yhanzi(1,6,4*16,sinhaozhan1); //号
write_yhanzi(1,6,5*16,sinhaozhan2); //站
}
if(x_num==4)
{
write_yhanzi(1,4,3*16,sinhaozhan0); //四
write_yhanzi(1,4,4*16,sinhaozhan1); //号
write_yhanzi(1,4,5*16,sinhaozhan2); //站
write_yhanzi(1,6,3*16,zhongdianzhan0); //终
write_yhanzi(1,6,4*16,zhongdianzhan1); //点
write_yhanzi(1,6,5*16,zhongdianzhan2); //站
}
if(x_num==5)
{
write_yhanzi(1,4,3*16,zhongdianzhan0); //终
write_yhanzi(1,4,4*16,zhongdianzhan1); //点
write_yhanzi(1,4,5*16,zhongdianzhan2); //站
write_yhanzi(1,6,0*16,ganxiechengzuo0); //感
write_yhanzi(1,6,1*16,ganxiechengzuo1); //谢
write_yhanzi(1,6,2*16,ganxiechengzuo2); //乘
write_yhanzi(1,6,3*16,ganxiechengzuo3); //坐
write_yhanzi(1,6,4*16,ganxiechengzuo4); //本
write_yhanzi(1,6,5*16,ganxiechengzuo5); //公
write_yhanzi(1,6,6*16,ganxiechengzuo6); //车
}
/******************************上行报站显示***********/
if(s_num==1)
{
write_yhanzi(1,6,0*16,xiayizhan0); //下
write_yhanzi(1,6,1*16,xiayizhan1); //站
write_shuzi(1,3*2,4*8,fuhao1,0); //:
write_yhanzi(1,4,3*16,sinhaozhan0); //四
write_yhanzi(1,4,4*16,sinhaozhan1); //号
write_yhanzi(1,4,5*16,sinhaozhan2); //站
write_yhanzi(1,6,3*16,sanhaozhan0); //三
write_yhanzi(1,6,4*16,sanhaozhan1); //号
write_yhanzi(1,6,5*16,sanhaozhan2); //站
}
if(s_num==2)
{
write_yhanzi(1,4,3*16,sanhaozhan0); //三
write_yhanzi(1,4,4*16,sanhaozhan1); //号
write_yhanzi(1,4,5*16,sanhaozhan2); //站
write_yhanzi(1,6,3*16,erhaozhan0); //二
write_yhanzi(1,6,4*16,erhaozhan1); //号
write_yhanzi(1,6,5*16,erhaozhan2); //站
}
if(s_num==3)
{
write_yhanzi(1,4,3*16,erhaozhan0); //二
write_yhanzi(1,4,4*16,erhaozhan1); //号
write_yhanzi(1,4,5*16,erhaozhan2); //站
write_yhanzi(1,6,3*16,yihaozhan0); //一
write_yhanzi(1,6,4*16,yihaozhan1); //号
write_yhanzi(1,6,5*16,yihaozhan2); //站
}
if(s_num==4)
{
write_yhanzi(1,4,3*16,yihaozhan0); //一
write_yhanzi(1,4,4*16,yihaozhan1); //号
write_yhanzi(1,4,5*16,yihaozhan2); //站
write_yhanzi(1,6,3*16,zhongdianzhan0); //终
write_yhanzi(1,6,4*16,zhongdianzhan1); //点
write_yhanzi(1,6,5*16,zhongdianzhan2); //站
}
if(s_num==5)
{
write_yhanzi(1,4,3*16,zhongdianzhan0); //终
write_yhanzi(1,4,4*16,zhongdianzhan1); //点
write_yhanzi(1,4,5*16,zhongdianzhan2); //站
write_yhanzi(1,6,0*16,ganxiechengzuo0); //感
write_yhanzi(1,6,1*16,ganxiechengzuo1); //谢
write_yhanzi(1,6,2*16,ganxiechengzuo2); //乘
write_yhanzi(1,6,3*16,ganxiechengzuo3); //坐
write_yhanzi(1,6,4*16,ganxiechengzuo4); //本
write_yhanzi(1,6,5*16,ganxiechengzuo5); //公
write_yhanzi(1,6,6*16,ganxiechengzuo6); //车
}
}
void main()
{
x_key=1;
s_key=1;
bz_key=1;
gb_key=1;
x_LED=1;
s_LED=1;
P0=P1=P2=P3=0xff; //单片机IO口初始化为1
init_ds1302();
delay_1ms(5);
init_lcd();
delay_1ms(5);
Clr_Scr();
time0_init();
delay_1ms(5);
init_12864_dis(); //初始化显示
delay_1ms(5);
uart_cfg();
while(1)
{
baozhan(); //显示上站和下站字头
yuyin(); //显示上站和下站是哪一站
key(); //改变key_san的值,判断K1-K4哪个键按下即设置时间的4个键哪个被按下
if(key_can<10)
{
key_with(); //根据key_san的值执行相应程序
}
if(flag_100ms==1)
{
flag_100ms=0;
}
if(flag_200ms==1) //200ms
{
flag_200ms=0;
temperature=read_temp(); //先读出温度的值
ds1302_dis(); //时钟显示函数,同时显示温度函数也在里面
}
}
}
五、实验现象
演示视频: