案例背景
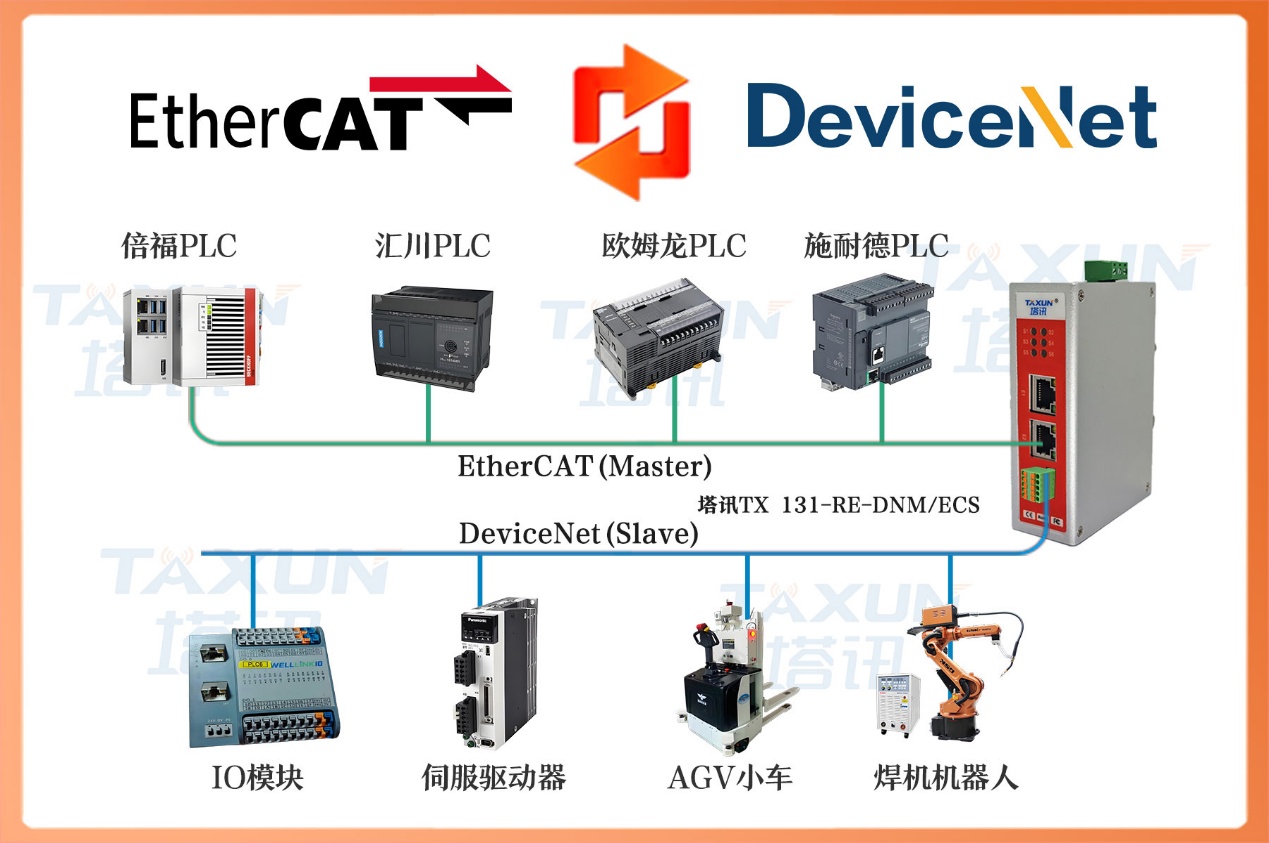
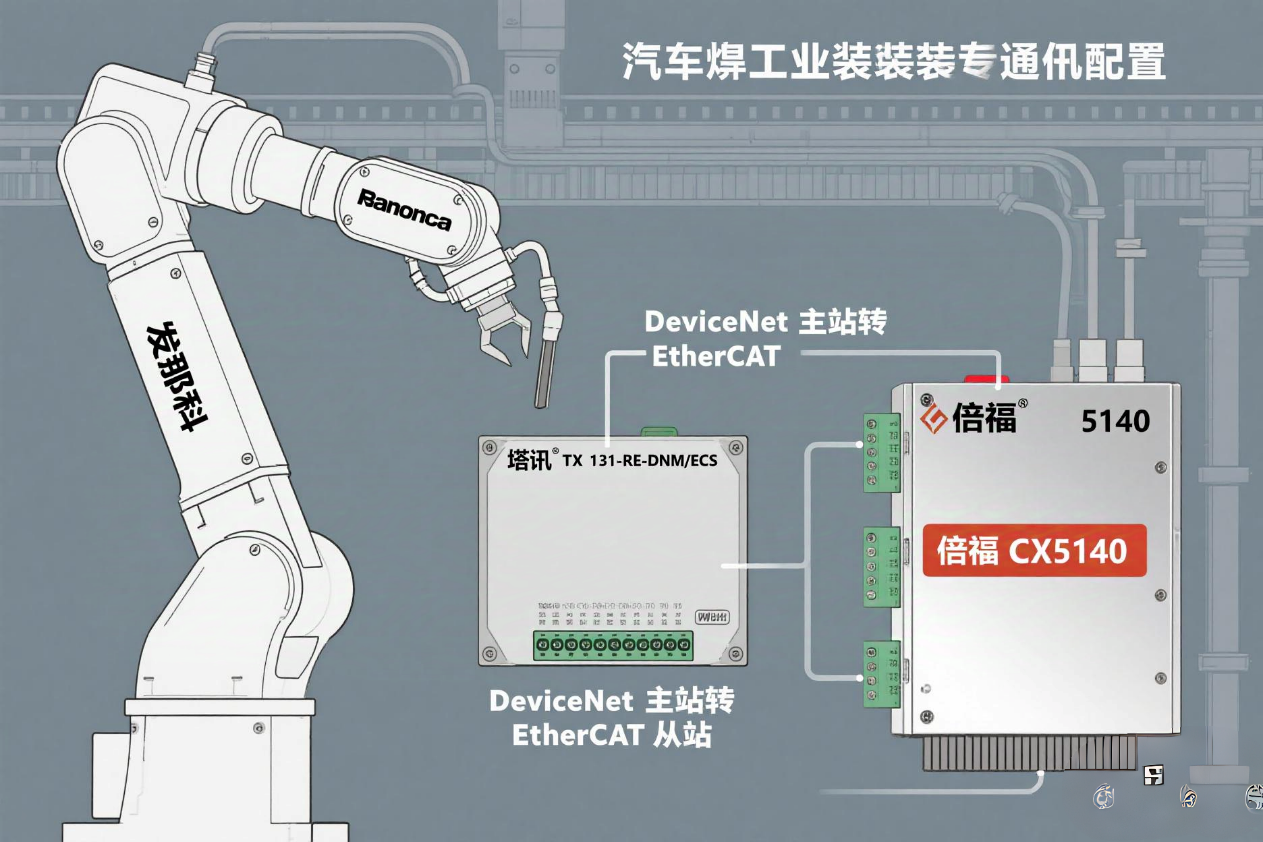
在汽车制造的焊装生产线中,高效且精准的设备协同运作至关重要。某汽车焊装车间采用了基于 DeviceNet 协议的众多从站设备,如焊接机器人的关节驱动电机、夹具定位传感器等,这些设备能够提供稳定且可靠的基础控制功能。然而,车间的自动化控制系统选用了具有强大运算与逻辑处理能力的倍福 CX5140 作为 EtherCAT 主站 PLC,旨在实现对整个生产线的集中化、智能化管理。由于 DeviceNet 与 EtherCAT 两种协议互不兼容,导致设备间通信受阻,严重影响生产线的整体效率与协同性。塔讯 TX 131-RE-DNM/ECS协议总线网关,能够将DeviceNet 主站转换为 EtherCAT 从站,为解决这一通信难题提供了有效途径。
设备参数
· 塔讯 TX 131-RE-DNM/ECS 协议总线网关
· 工作电压:24V DC,允许 ±10% 的电压波动范围,以适应复杂的工业供电环境。
· 通信速率:DeviceNet 端支持 125kbps、250kbps、500kbps 三种常见速率,可根据实际网络负载灵活选择;EtherCAT 端数据传输速率高达 100Mbps,满足高速数据交互需求。
· 防护等级:IP20,适用于一般工业环境,对内部电路提供基本防护。
· 支持设备数量:可同时连接多达 16 个 DeviceNet 从站设备,满足中等规模生产线的设备接入需求。
· 倍福 CX5140 PLC(EtherCAT 主站)
· 处理器:采用高性能的 Intel Atom 处理器,具备强大的运算能力,可快速处理大量的设备数据与控制逻辑。
· 内存:4GB DDR3 内存,为程序运行与数据存储提供充足空间,确保系统稳定运行。
· 通信接口:集成两个 EtherCAT 接口,支持实时、确定性通信,保证数据传输的及时性与准确性。
· DeviceNet 从站设备(以焊接机器人关节驱动电机为例)
· 品牌:发那科
· 功率:2kW - 5kW,满足不同焊接任务对动力的需求。
· 控制精度:定位精度可达 ±0.05mm,保证焊接机器人的运动精准度,提升焊接质量。
· 通信协议:遵循标准 DeviceNet 协议,确保与其他 DeviceNet 设备及网关的兼容性。
配置过程
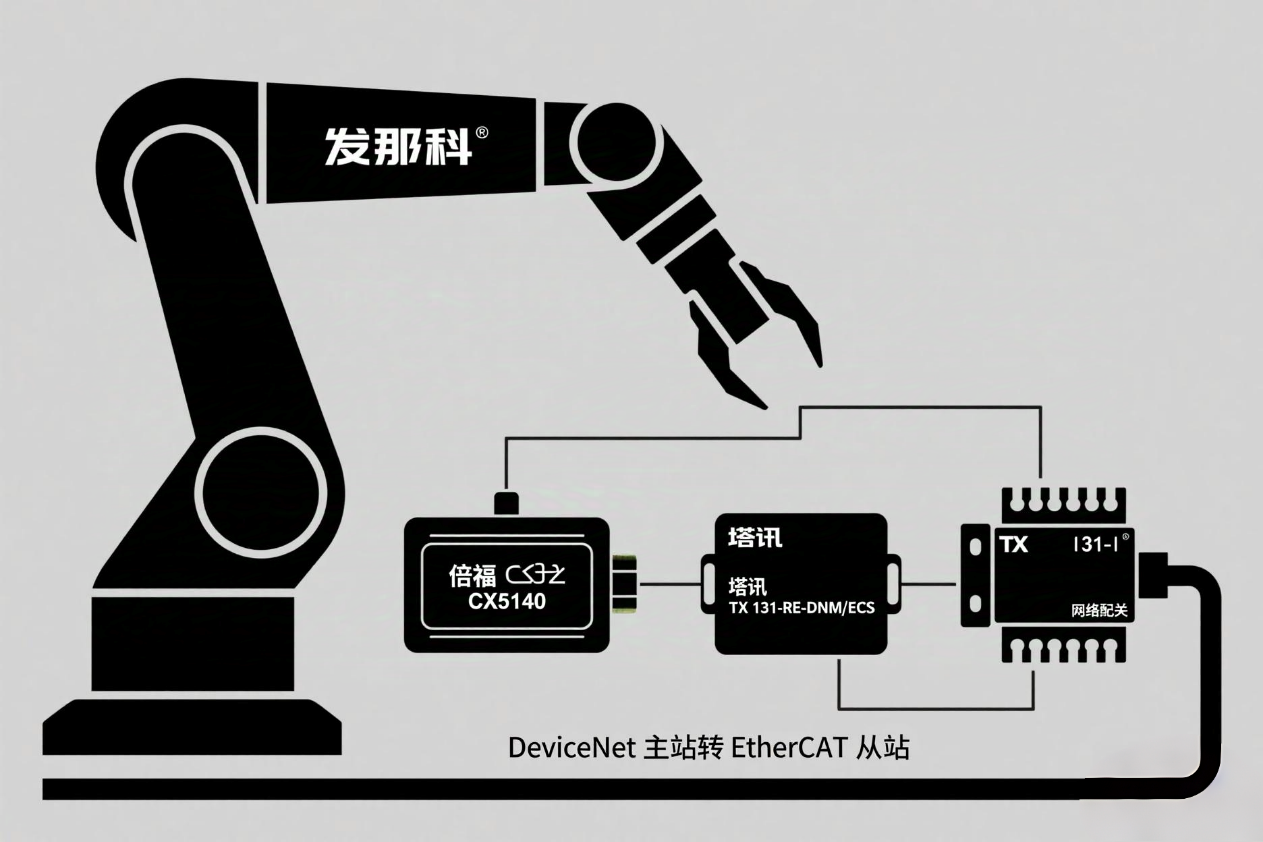
- 硬件连接
· 将塔讯网关的 DeviceNet 接口通过专用电缆连接到 DeviceNet 从站设备的通信端口,确保连接紧密且正确,同时注意安装好总线终端电阻,以保证 DeviceNet 网络信号的完整性与稳定性。
· 使用网线将网关的 EtherCAT 接口与倍福 CX5140 PLC 的 EtherCAT 端口相连,为网关接通 24V DC 电源,观察网关指示灯状态,确认设备正常启动。若指示灯异常,需排查电源连接、网络线路等问题。
- 倍福 CX5140 PLC 配置
· 打开倍福 TwinCAT 3 编程软件,创建新项目。
· 在项目中添加 CX5140 PLC 设备,完成硬件组态,根据实际使用的模块配置输入输出点数及相关参数。
· 在网络视图中添加 EtherCAT 网络,将塔讯网关作为 EtherCAT 从站设备添加到网络中,设置网关的设备名称、IP 地址等参数,确保与 PLC 网络配置一致。例如,将网关 IP 地址设置为 192.168.1.101,子网掩码 255.255.255.0。
· 定义 EtherCAT 通信数据区,规划需要与网关进行数据交互的变量,如焊接机器人关节的位置反馈、电机运行状态、控制指令等数据。
- 塔讯网关配置
· 通过浏览器访问网关的 Web 配置界面,输入默认 IP 地址(如 192.168.1.100),登录后修改网关的基本网络参数,包括 IP 地址、子网掩码、网关地址等,使其与倍福 CX5140 PLC 所在网络段相匹配。
· 在 DeviceNet 主站配置页面,设置 DeviceNet 网络的通信速率、从站地址范围等参数,扫描并添加连接的 DeviceNet 从站设备,配置每个设备的参数,如设备类型、通信模式等。
· 在 EtherCAT 从站配置页面,设置 EtherCAT 设备名称、设备编号等参数,建立 DeviceNet 从站设备数据与 EtherCAT 主站数据区的映射关系。例如,将焊接机器人关节位置反馈数据映射到 PLC 的特定输入存储区,将控制指令映射到相应的输出存储区,实现 DeviceNet 转 EtherCAT 的数据准确传输。
- DeviceNet 从站设备配置
· 使用从站设备配套的调试软件,将设备的通信模式设置为 DeviceNet 从站模式。
· 设置设备的 DeviceNet 从站地址,确保与塔讯网关的 DeviceNet 主站配置一致。
· 配置设备的控制参数,如焊接机器人关节驱动电机的速度限制、加速度、减速度等,以满足焊接工艺的要求。
- 系统测试
· 完成上述配置后,依次启动倍福 CX5140 PLC、塔讯网关和 DeviceNet 从站设备。
· 在 PLC 编程软件中编写测试程序,向焊接机器人关节驱动电机发送控制指令,观察电机是否能够按照指令准确运行,并通过 PLC 读取电机的运行状态反馈数据,验证DeviceNet 转 EtherCAT的数据传输准确性。
· 模拟不同的焊接任务和工况,进行长时间稳定性测试,检查系统在高负载和复杂环境下的运行稳定性和可靠性。例如,进行连续 1000 次焊接动作测试,记录电机运行异常次数及数据传输丢包率等指标。

应用效果
通过塔讯 TX 131-RE-DNM/ECS 协议总线网关实现 DeviceNet 转 EtherCAT,成功解决了汽车焊装生产线中设备通信不畅的问题。倍福 CX5140 PLC 能够实时、精准地控制 DeviceNet 从站设备,焊接机器人的定位精度进一步提升,焊接质量显著提高,产品合格率从原来的 90% 提升至 96%。同时,生产线的自动化程度和生产效率大幅提高,生产节拍缩短了 20%,有效降低了生产成本。