目录
- [一、STM32G4 电流环闭环](#一、STM32G4 电流环闭环)
-
- [1. 速度环闭环建模](#1. 速度环闭环建模)
- 附学习参考网址
一、STM32G4 电流环闭环
1. 速度环闭环建模
- 前一篇文章中完成了电流环闭环建模以及IF电流环闭环速度环开环的方式强拖启动电机,这篇文章中增加速度环闭环。
- 基于电流环闭环simulink工程,插入速度环子系统;
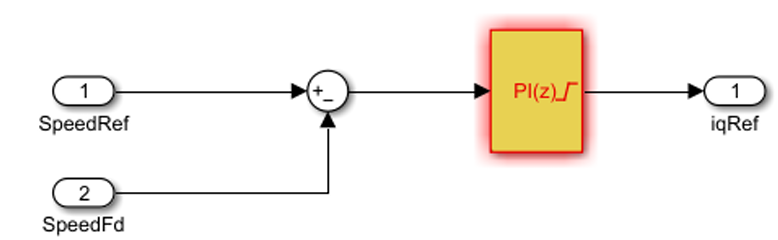
- 速度环输入为参考转速和反馈速度,输出为q轴参考电流
- 增加PI控制器
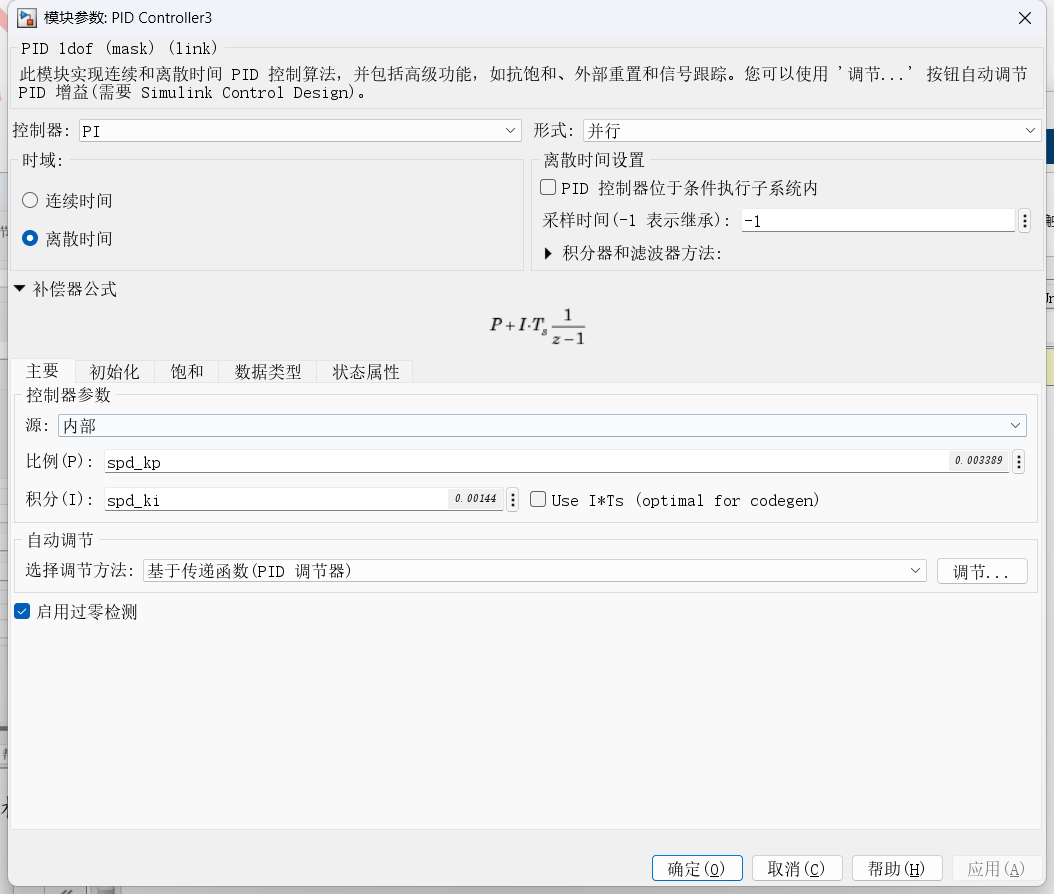
- 速度环KpKi可以参考如下公式设计:
{ K p ω = β J 1.5 p n ϕ f K i ω = β K p ω \begin{cases} K_{p\omega} = \frac{\beta J}{1.5p_n\phi_f} \\ K_{i\omega} = \beta K_{p\omega} \end{cases} {Kpω=1.5pnϕfβJKiω=βKpω
其中J是转动惯量,β是闭环带宽;通道电机的转动惯量都很难得到一个较为准确的值,有些电机出厂铭牌中也少有提到,根据经验值可以自己判断,此处设置为Kp:0.3389,Ki:0.0144;由于速度环的采样频率低于电流环,所以带宽一般都很小

- 速度环输出的q轴参考电流与开发板DC输入的母线电流能力相关,这里设置为±3;

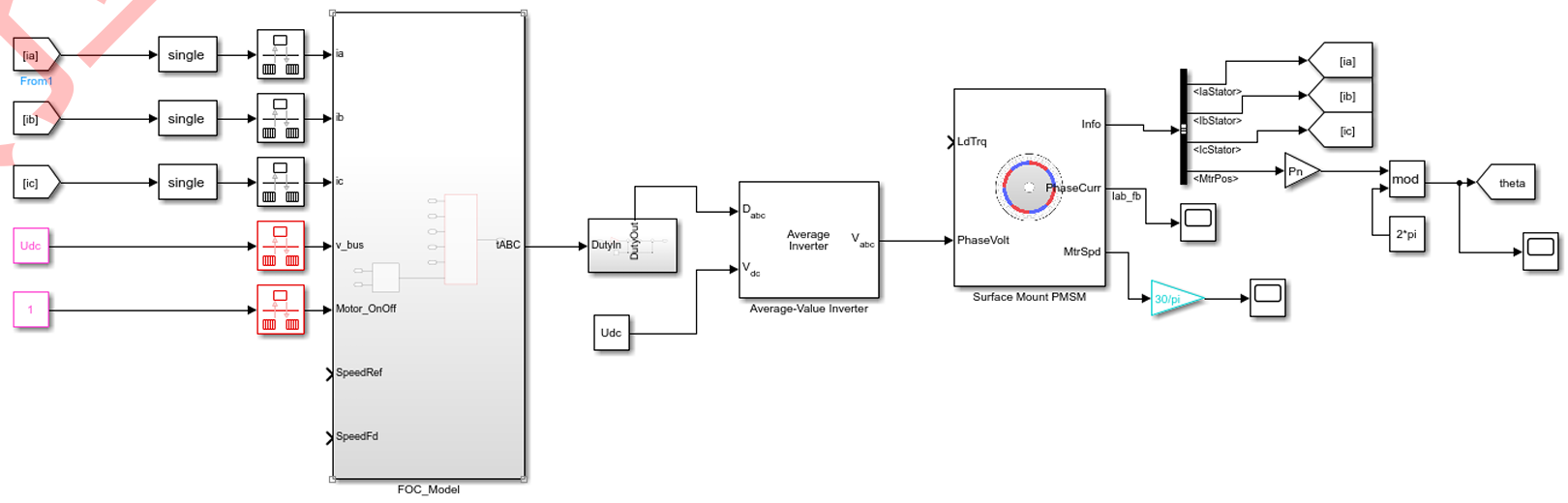
- 将速度环与电流环子系统结合在一起形成新的子系统FOC_Model;
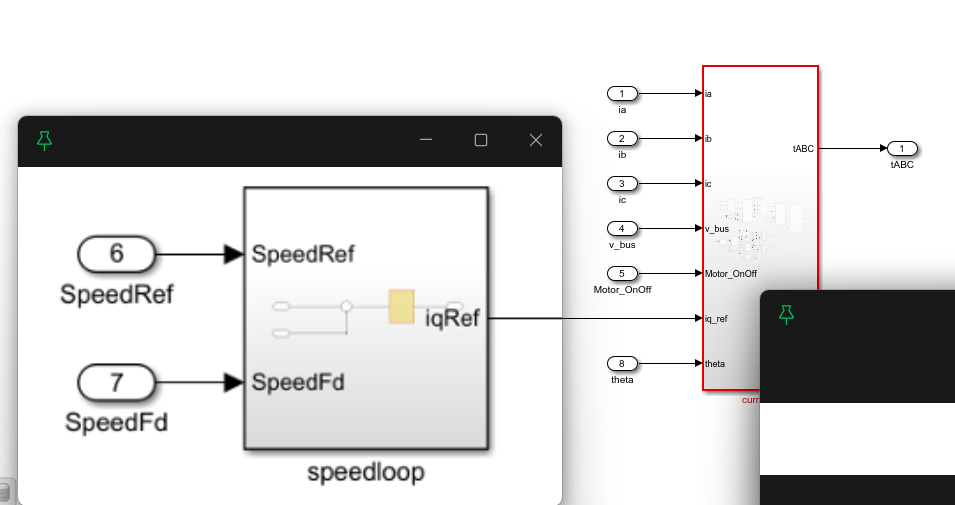
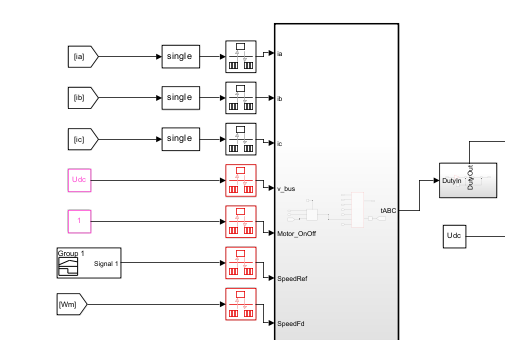
- 连接模型的输入和输出;
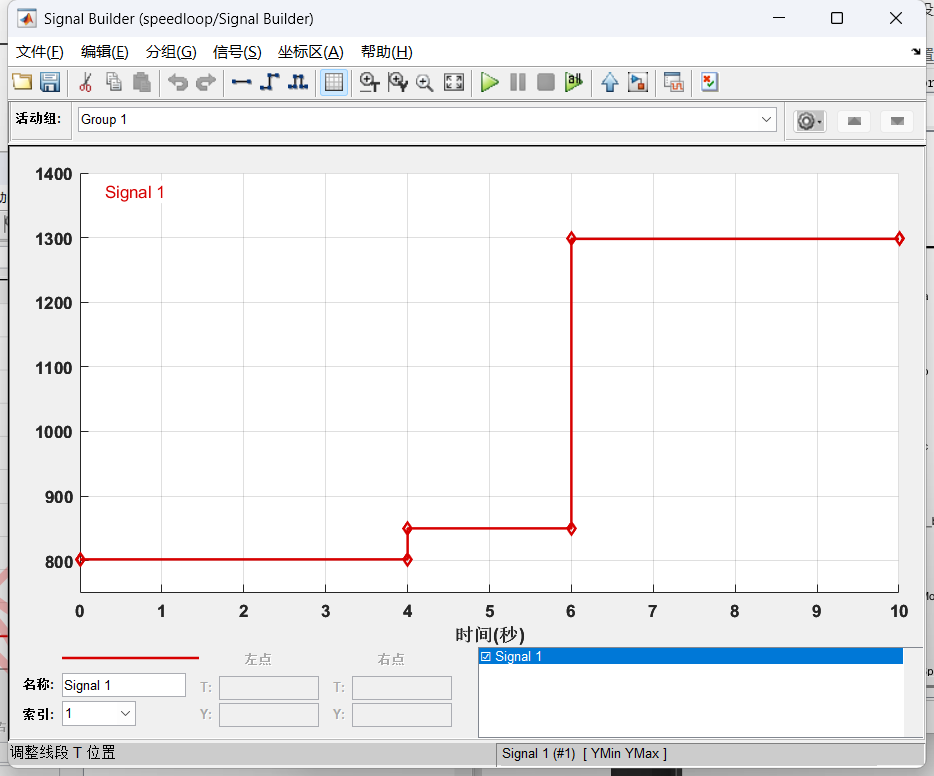
- 使用Signal Builder模块来设置参考速度;

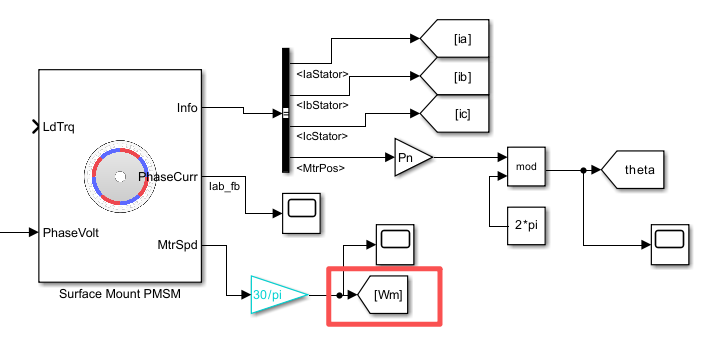
- SpeedFd的输入使用电机输出的机械速度;
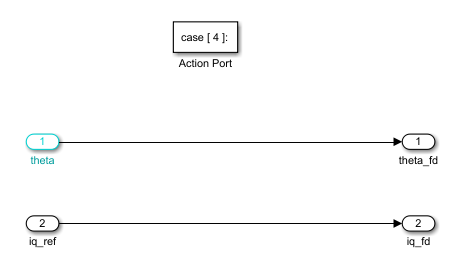
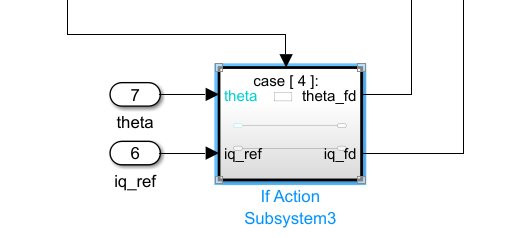
- 此时还需要修改电流环模块的状态记得第四状态,将电机的输出的电角度作为模型的计算角度输入;
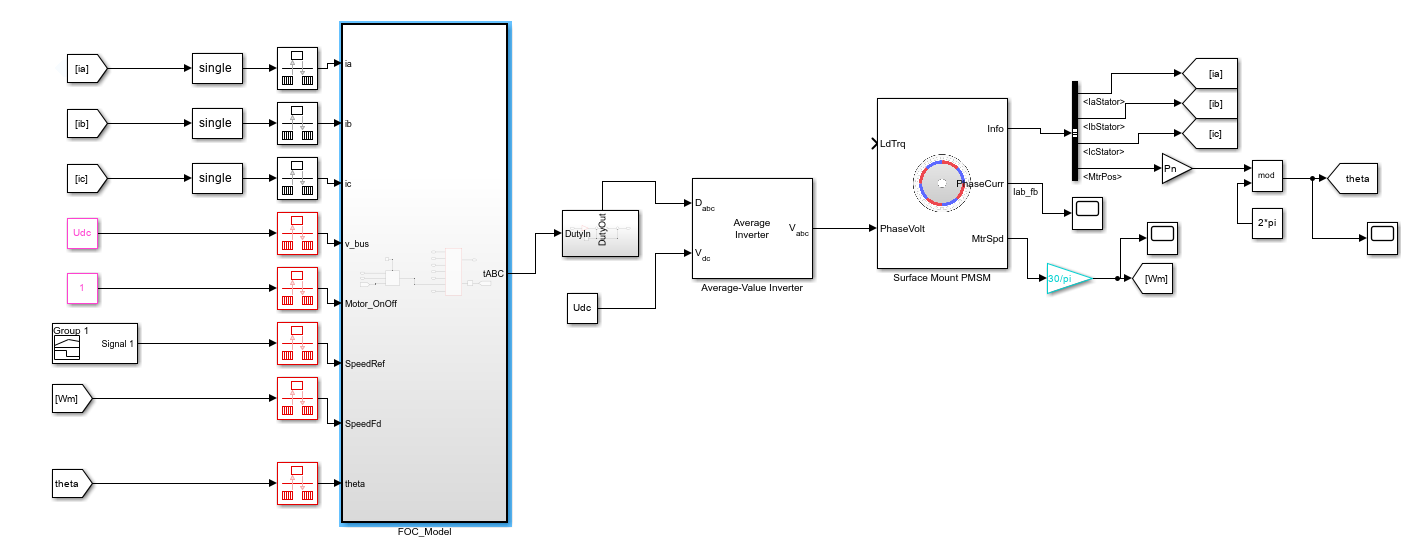
- 此时,FOC的控制算法模型已经搭建完成,点击方针按钮,查看三相电流波形和点输出速度;
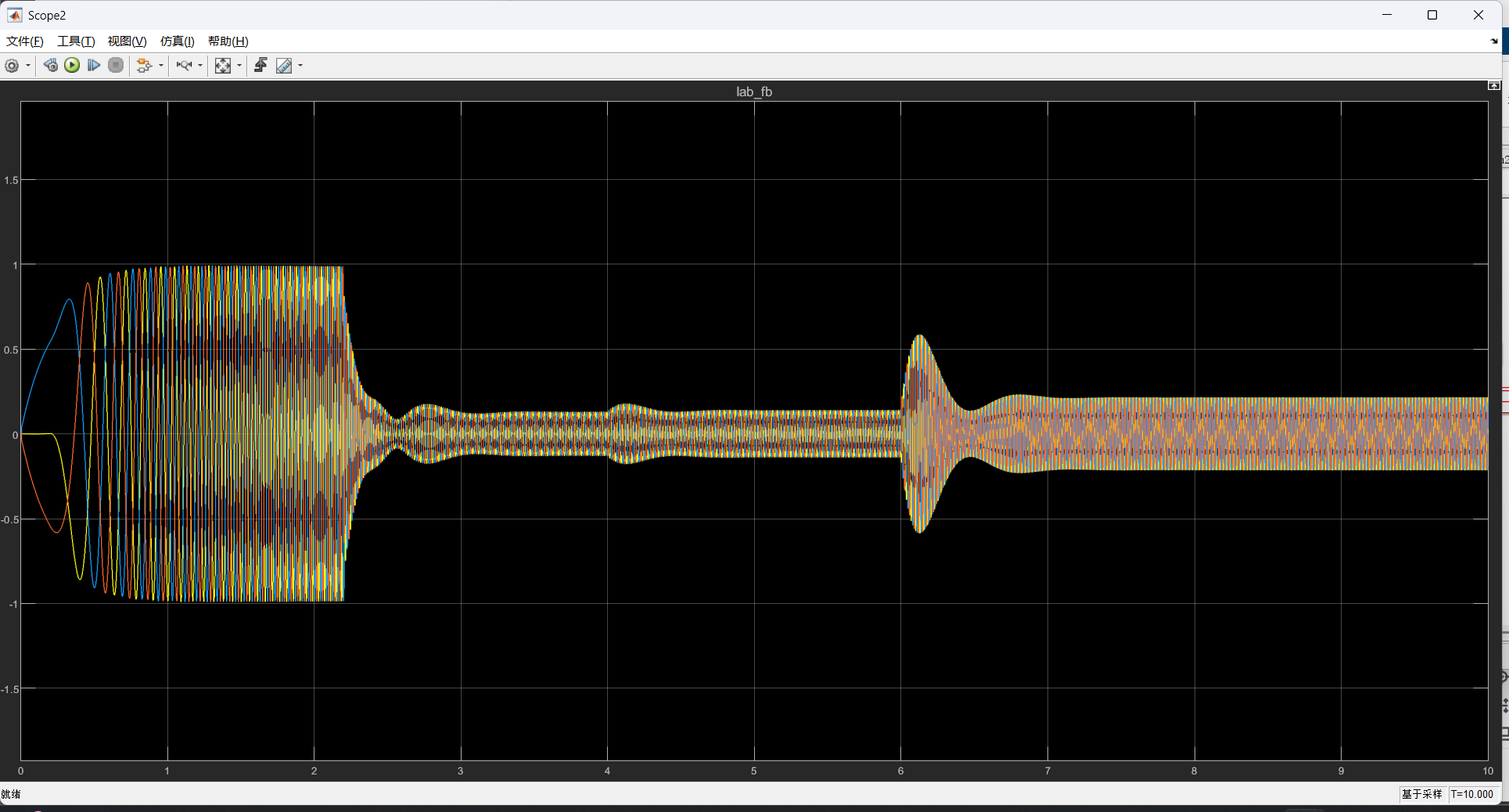
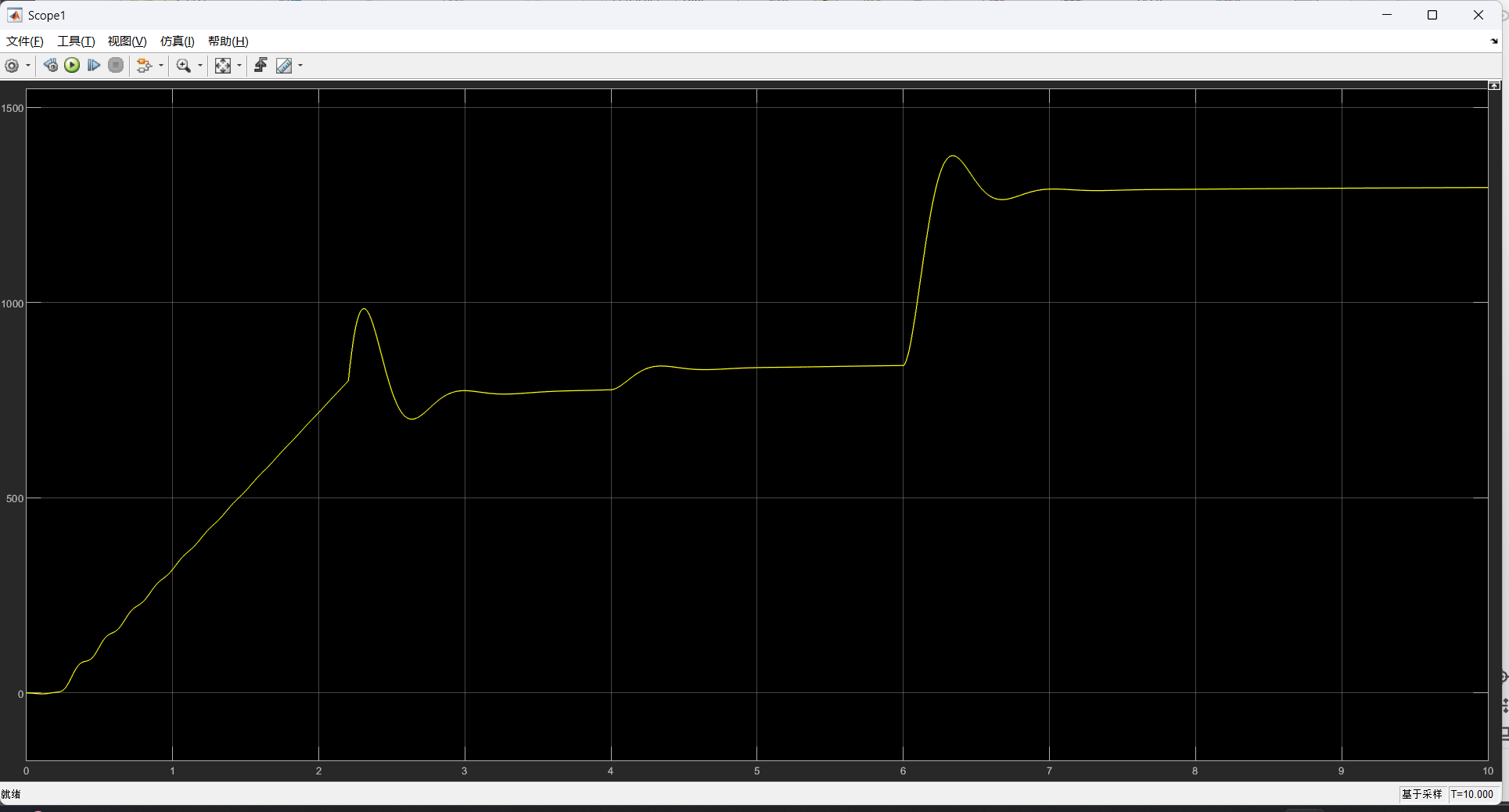
- 可以看到三相电流切速度环之后,不再出现抖动,电机输出速度也完美收敛到期望的转速。