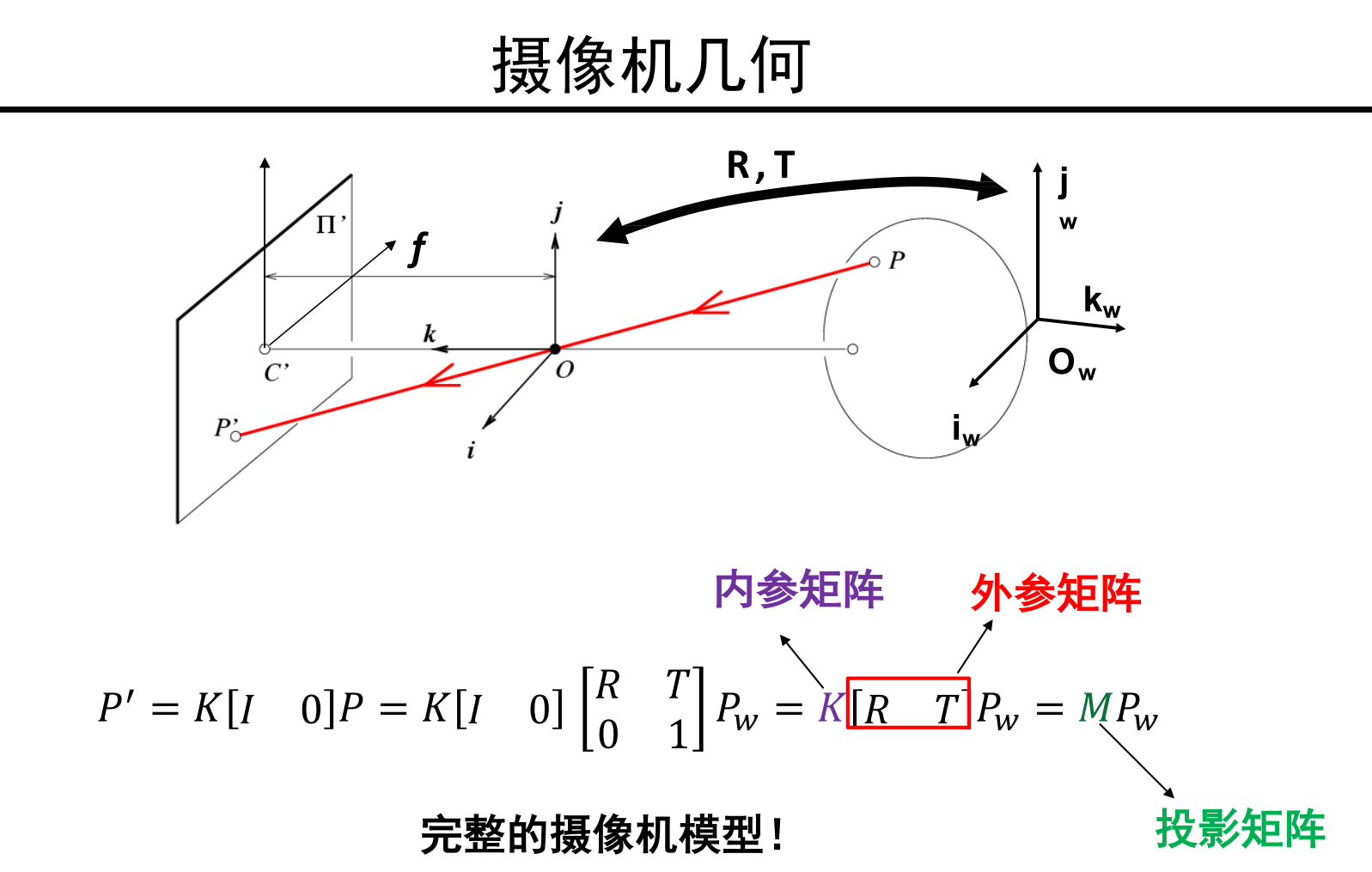
一个空间中点到像素平面转换,需要经过
-
空间坐标系转换到相机坐标系
-
相机坐标系下3D点到相机平面转换
-
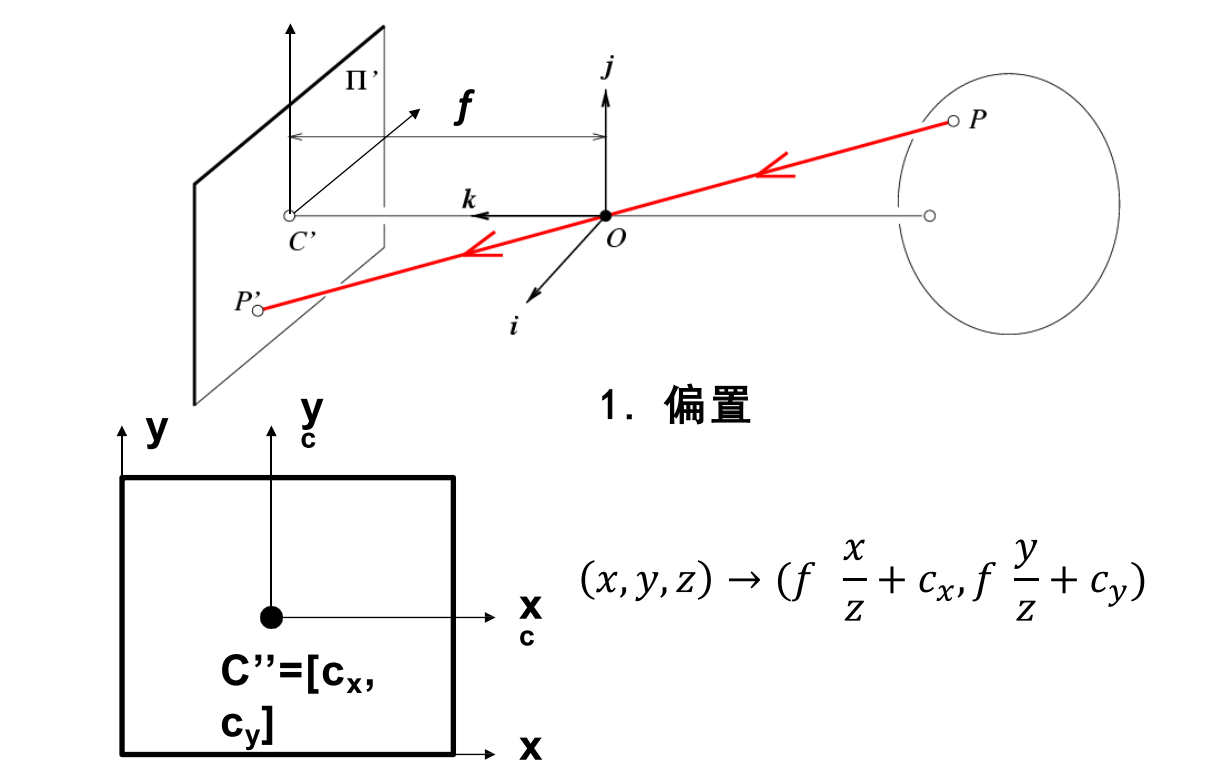
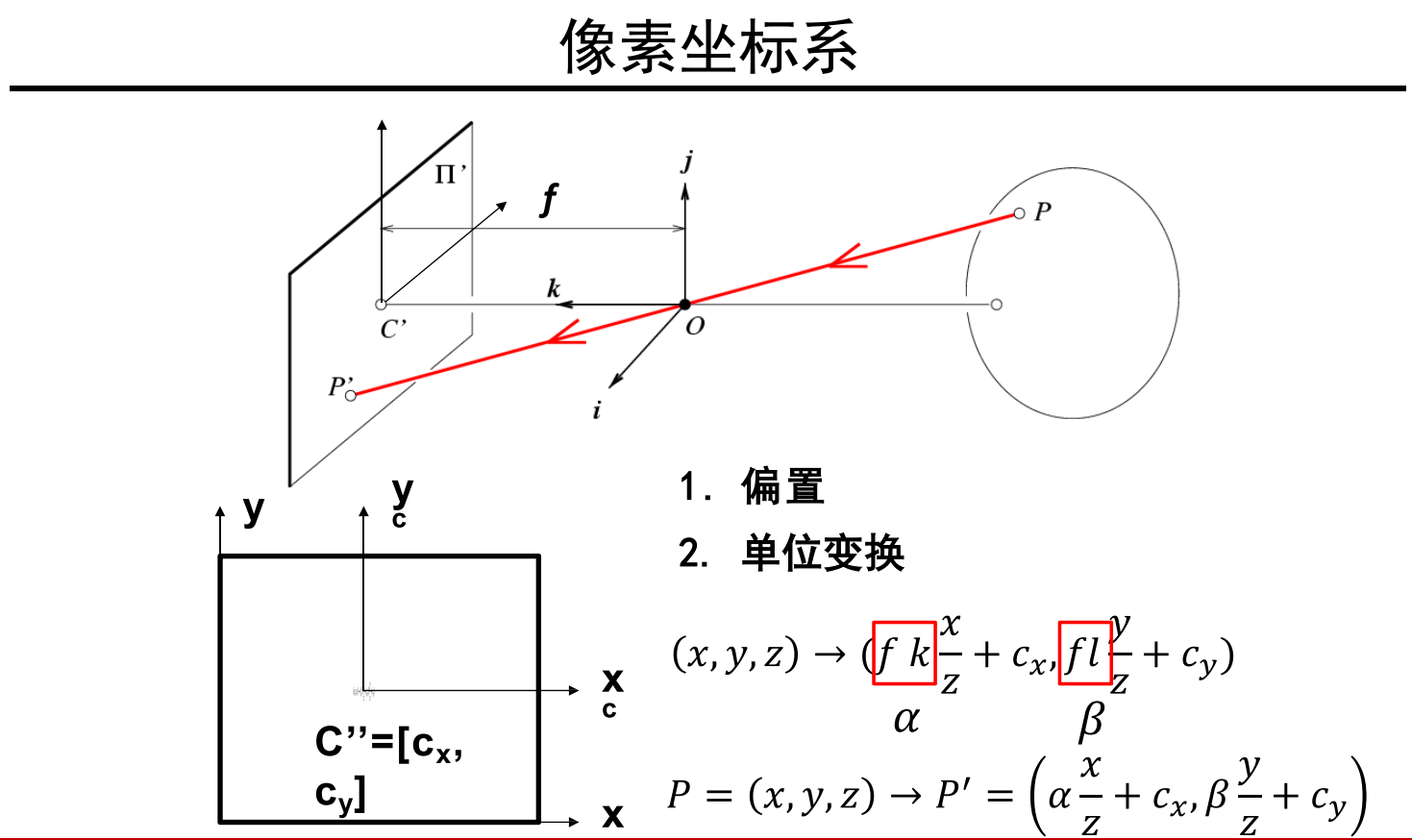
相机平面到像素平面转换
相机三维空间到像素平面转换
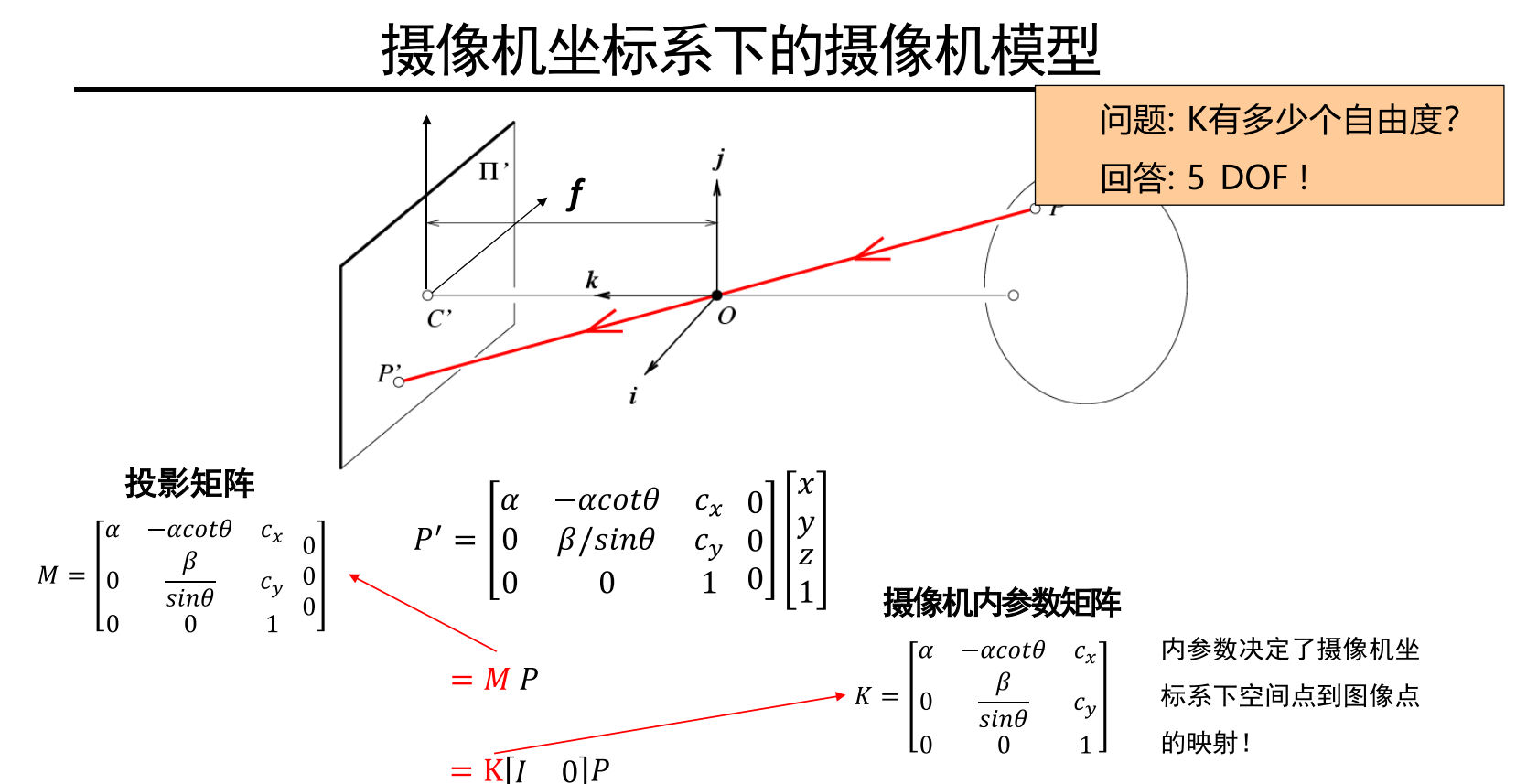
- 3D点到相机平面转换
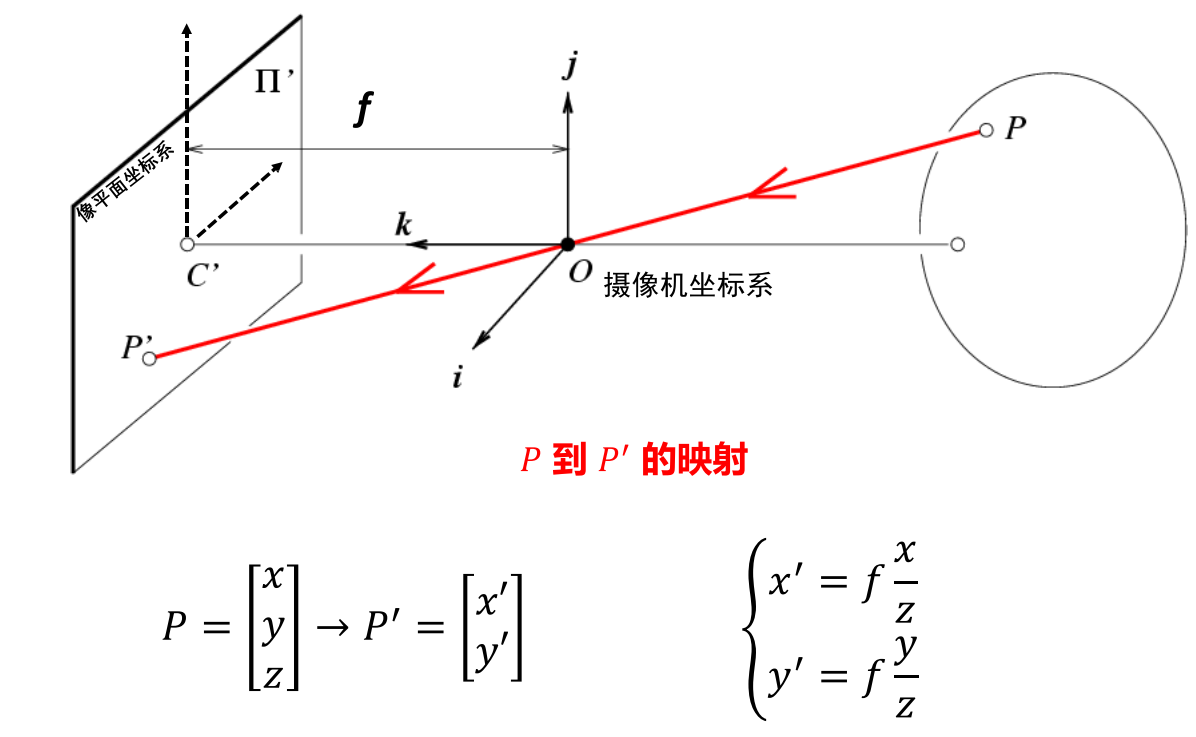
- 相机平面到像素平面转换
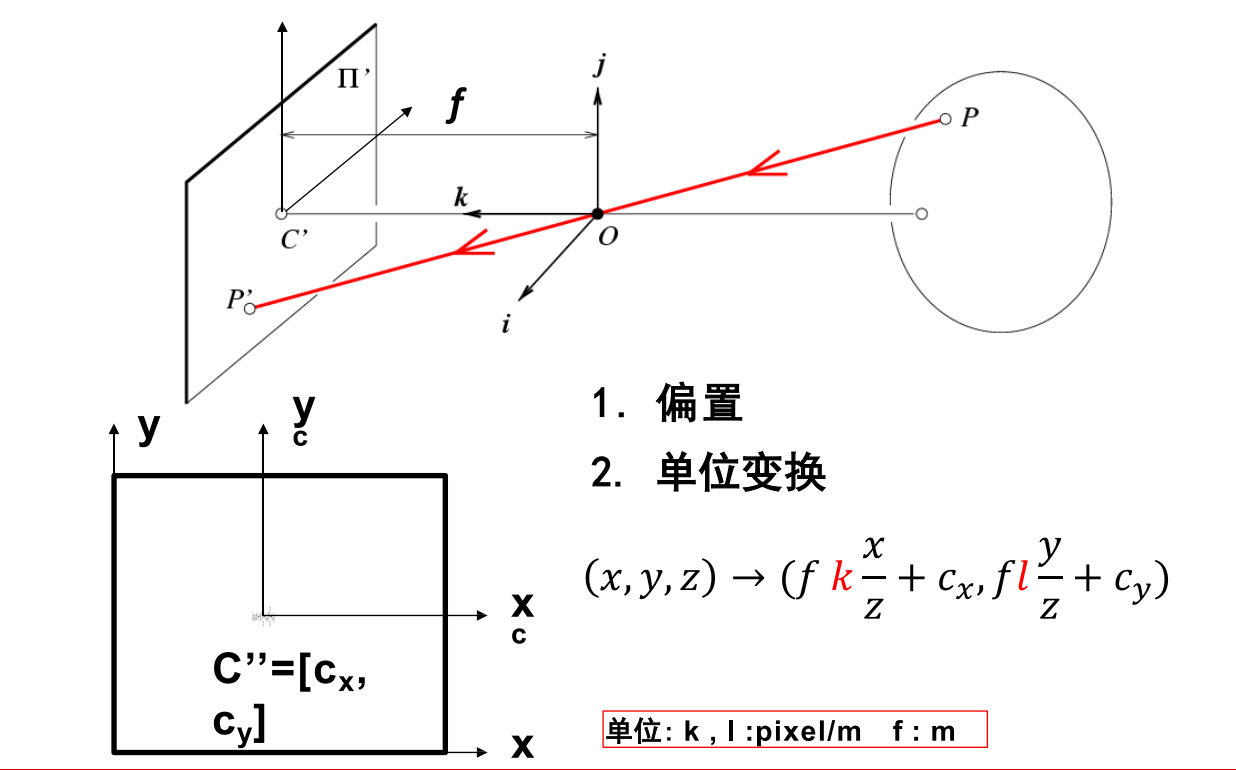
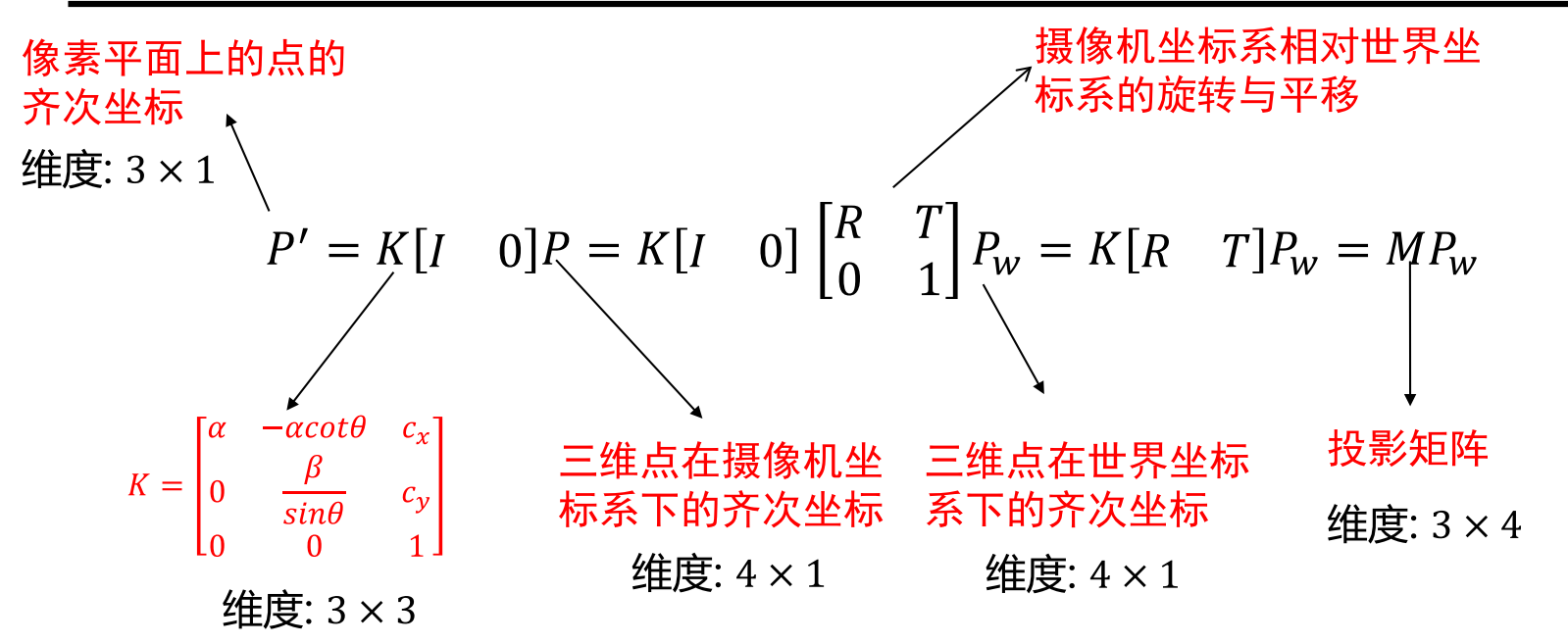
涉及到单位的转换,和像素原点到相机平面原点的转换
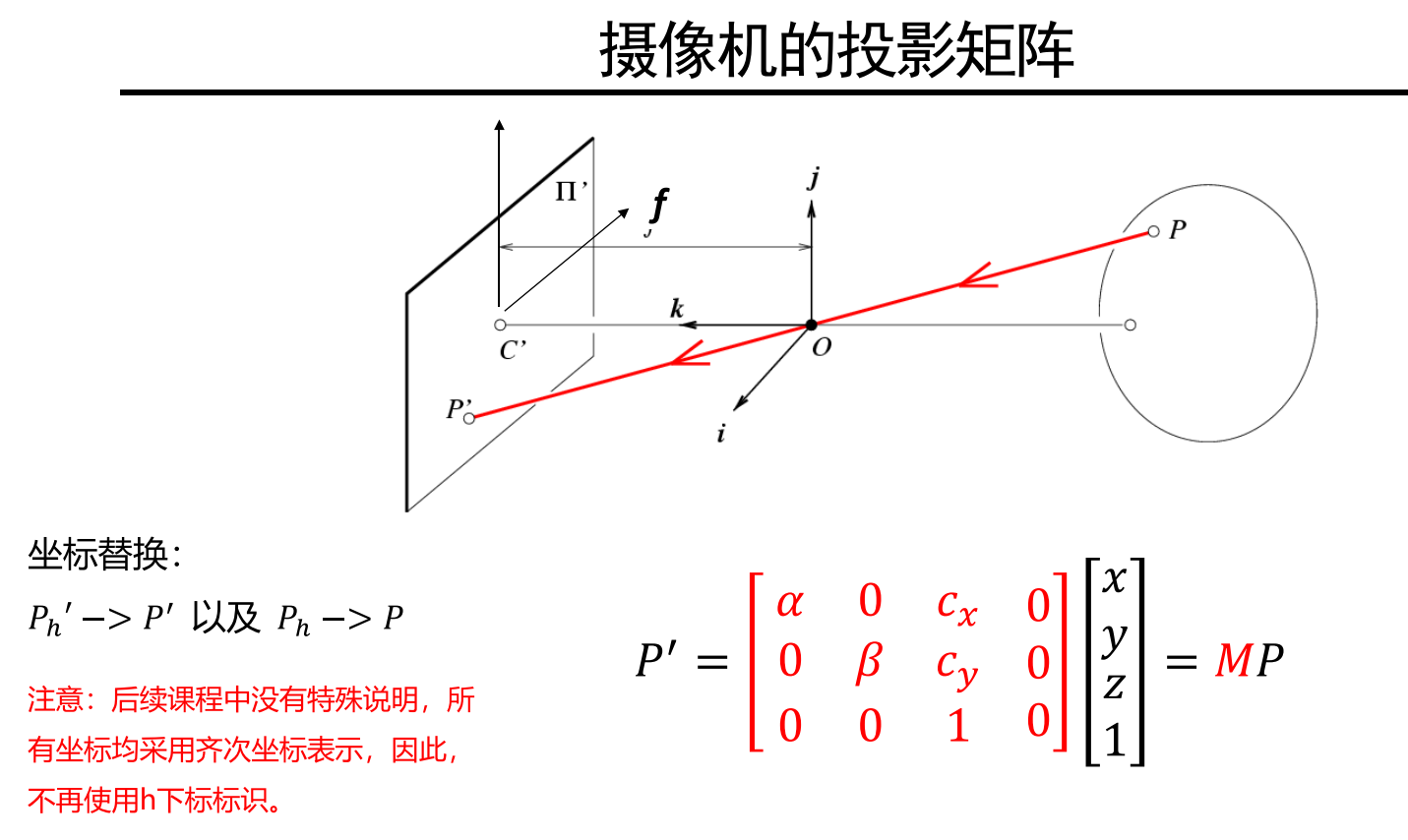
为了方便表示与计算,使用齐次坐标的形式
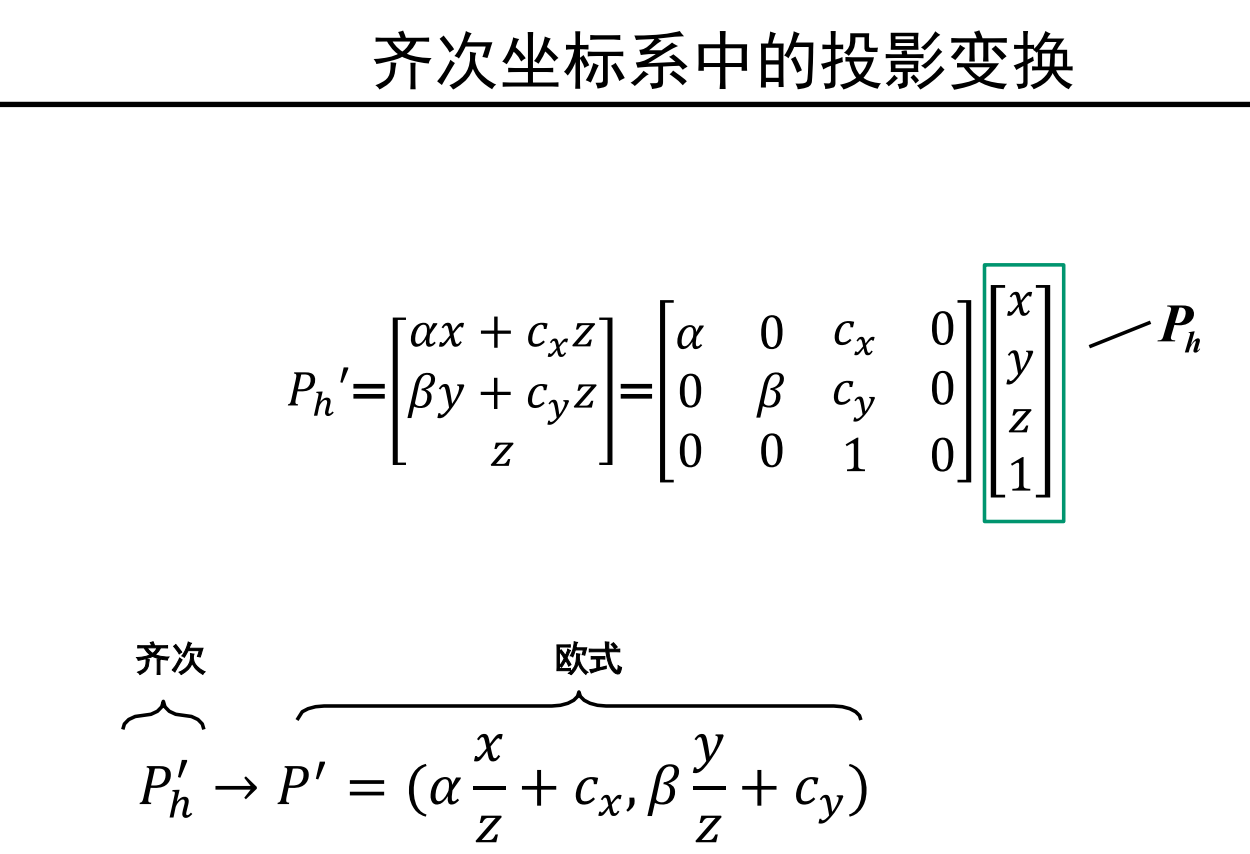
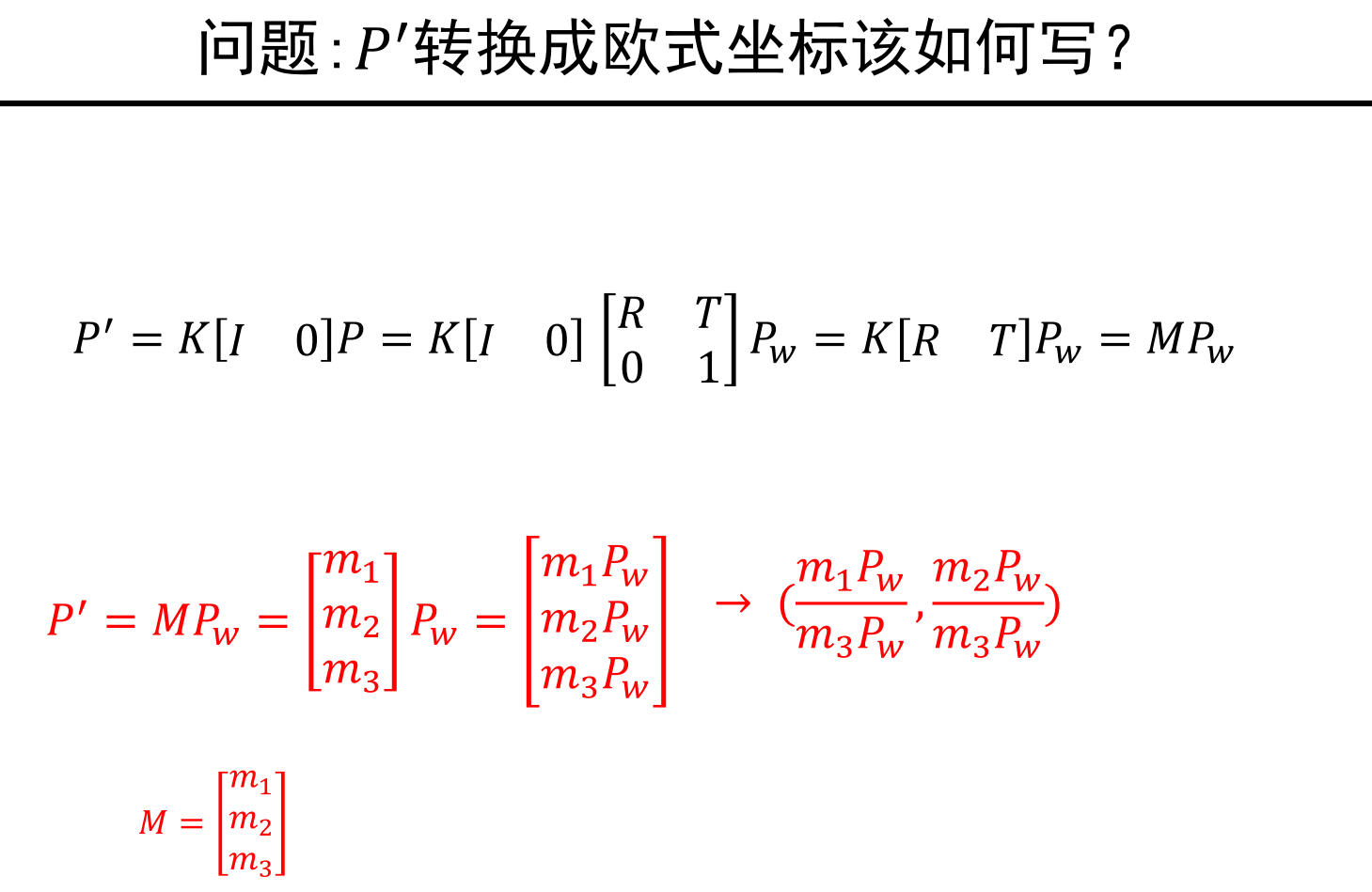
得到投影矩阵M, P是相机空间中坐标, M投影矩阵,p_1 投影
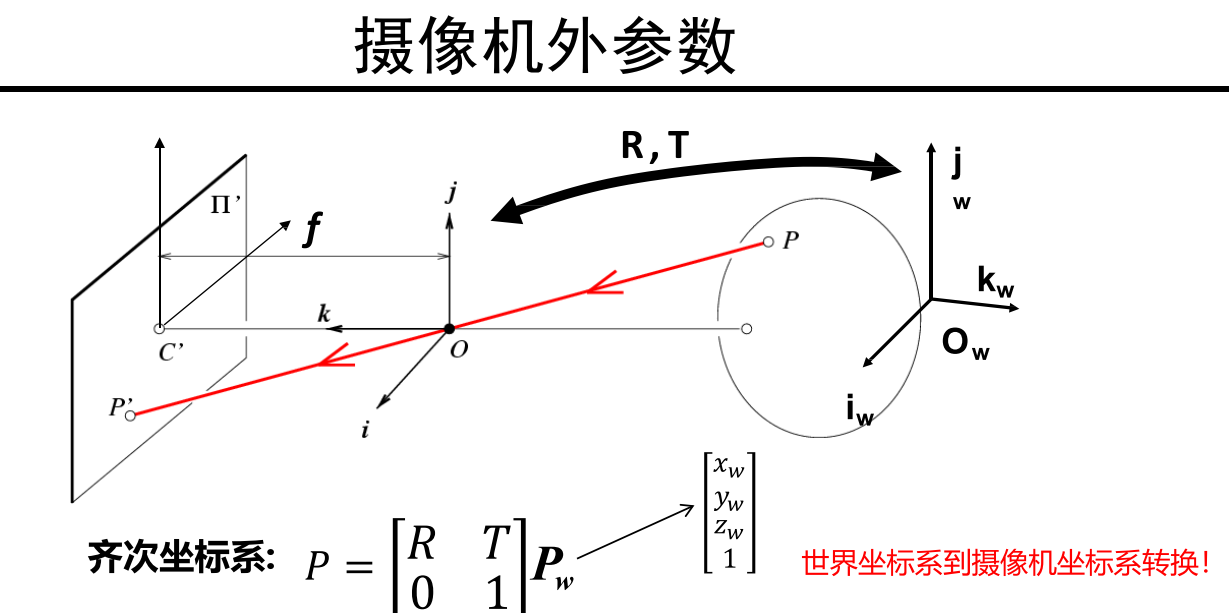
世界坐标系到相机坐标系转换
需要经过 旋转和平移,
一个空间中点到像素平面转换,需要经过
空间坐标系转换到相机坐标系
相机坐标系下3D点到相机平面转换
相机平面到像素平面转换
涉及到单位的转换,和像素原点到相机平面原点的转换
为了方便表示与计算,使用齐次坐标的形式
得到投影矩阵M, P是相机空间中坐标, M投影矩阵,p_1 投影
需要经过 旋转和平移,