
半桔 :个人主页
🔥 个人专栏 : 《Linux手册》《手撕面试算法》《网络编程》
🔖很多人在喧嚣声中登场,也有少数人在静默中退出。 -张方宇-
文章目录
前言
在互联网技术蓬勃发展的今天,高并发、高可靠的网络服务 已成为各类应用的核心诉求 ------ 从支撑海量用户的 Web 服务器,到实时交互的分布式系统,甚至是物联网设备的通信底座,高效的网络通信设计 与进程生命周期管理,始终是保障服务稳定运行的基石。
本文将聚焦 Linux 网络编程与进程管理 的核心技术,以 "从基础到进阶,从实现到优化" 的脉络展开:
- 从最基础的 套接字接口 出发,剖析网络通信的底层逻辑;
- 通过 TCP 服务器 的搭建,掌握客户端 - 服务端交互的核心流程;
- 针对高并发场景,探索 多进程、线程池 等并行模型的设计,突破服务吞吐量的瓶颈;
- 最终深入 进程组与守护进程 的实践,解决服务 "脱离终端、长期稳定运行" 的生产级需求。
TCP通信是面向字节流的,而UDP是面向最字节报的,因此两者通信方式上有本质的差异。
TCP面向字节流也就意味着,接收方读取上来的数据可能是不完整的,因此TCP通信要进行协议定制,规定一个消息从哪到哪是一个整体部分。关于协议的定制我们在下一篇博客中详细讲解,本篇文章我们假设通过TCP通信对方就可以拿到一个完整的数据。
套接字接口
TCP的接口和UDP接口有类似的,当时也有一些不同之处。
UDP通信的步骤就是:创建套接字,绑定,接收和发送消息;而TCP与其是不一样的。
- TCP通信时面向连接的,需要通信双方先建立连接,服务器一般是比较"被动"的,服务器一直处于等待外界连接的状态(监听状态)。
因此在进行绑定完成之后,服务器要先进入监听状态,与客户端建立连接后才能进行通信:
int listen(int sockfd , int backlog):
- 参数一:套接字;
- 参数二:
backlog表示未完成连接队列 (处于三次握手过程中)和已完成连接队列 (三次握手完成,等待accept处理)的最大长度之和。用来调节连接时的并发量; - 返回值:成功返回0,失败-1;
第二个接口,将服务器设置为监听模式之后,要对客户端的连接请求做出响应,要接收客户端的请求:
int accept(int sockfd , struct sockaddr_in *addr , socklen_t *addrlen):
- 参数一:套接字;
- 参数二:输出型参数,一个结构体,存储着客户端的ip和端口号信息;
- 参数三:输出型参数,表示第二个结构体的大小;
- 返回值:返回一个文件描述符,通过该文件描述符可以让直接使用
write和read接口进行通信,就像从文件中进行读写一样。
注意:accept中的sockfd也属于文件描述符,只不过该描述符主要负责将底层的连接请求来上来,而不负责进行IO交互;而accept返回的文件描述符是专门用来进行IO交互的。
随着客户端越来越多,accept返回的文件描述符也就也来越多,每一个都负责与一个客户端进行通信。
客户端要与服务端建立连接,所以需要先服务端发送连接请求:
int connet(int sockfd , struct sockaddr* addr , socklen_t addrlen):
- 参数一:套接字;
- 参数二:结构体,内部包含要进行连接的IP和端口号;
- 参数三:参数二结构体的大小;
- 返回值:0表示成功,-1表示失败。
TCP服务器
使用一个类来实现TCP服务器:
- 内存成员需要有IP和端口号,来进行绑定;
- 并且需要将套接字存储起来,否则后续在不到套接字就会导致无法关闭对应的网络文件位置。
- 此处在设计一个
bool类型的变量,让用户可以控制时候打开服务器。
初始化的时候需要外界将这些参数都传进行保存起来,但是并不在初始化时创建套接字,而是当用户运行时才进行创建。
cpp
const std::string defaultip = "0.0.0.0";
class Server
{
public:
Server(const uint16_t &port , const std::string &ip = defaultip)
:port_(port) , ip_(ip)
{}
private:
uint16_t port_;
std::string ip_;
int sockfd_;
};与UDP一样,为了保证服务器能够接收来自各个网卡上的数据,我们再对服务器进行绑定的时候使用ip为0。
在此之前我们需要思考以下接收到的信息如何进行处理?
如果我们直接让处理方法都在循环内完成,就会导致代码拓展性差,如果后续希望接入进程池就需要对代码进行重构,因此此处将对接收到的信息处理方法也单独封装一个类:
该类主要负责,将对信息进行处理,处理完后,向客户端返回数据,因此该类的成员必须有一个string用来存储待处理的信息 ,为了进行通信还需要拿到对应的文件描述符。
我们可以在类中对调用运算符进行重载,在进行消息调用的时候更简单。
为了后续测试,我们先不进行太复杂的处理:
cpp
class Task
{
public:
Task(const int & fd , const std::string message)
:fd_(fd) , message_(message)
{}
bool operator()()
{
std::string ret = "I have got your message : " + message_;
write(fd_ , ret.c_str() , ret.size());
return true;
}
private:
int fd_;
std::string message_;
};现在可以对服务器进行初始化了,初始化主要分为3步:
- 创建套接字;
- 绑定;
- 设置监听模式。
cpp
void Init()
{
// 1. 创建套接字
// 2. 绑定
// 3. 设置监听模式
sockfd_ = socket(AF_INET , SOCK_STREAM , 0);
if(sockfd_ < 0)
{
Log(Fatal) << "socket failed ";
exit(Socket_Err);
}
struct sockaddr_in local;
local.sin_family = AF_INET;
local.sin_port = htons(port_);
char clientip[32];
inet_aton(ip_.c_str() , &local.sin_addr);
if(bind(sockfd_ , (const struct sockaddr*)&local , sizeof(local)) < 0)
{
Log(Fatal) << "bind failed" ;
exit(Bind_Err);
}
if(listen(sockfd_ , 10) < 0)
{
Log(Fatal) << "listen failed" ;
exit(Listen_Err);
}
}运行服务器了,运行服务器:
- 先建立连接;
- 读取数据;
- 做出反应。
cpp
void Service(int fd_)
{
char buffer[1024];
while(1)
{
int n = read(fd_ , buffer , sizeof(buffer) - 1);
if(n > 0)
{
buffer[n] = 0;
Task task(fd_ , buffer);
task();
}
else if(n == 0)
{
close(fd_);
break;
}
else
{
Log(Error) << "read error";
close(fd_);
break;
}
}
}
void Start()
{
// 1. 建立连接
// 2. 读取消息
// 3. 对消息进行处理,并返回
struct sockaddr_in client;
socklen_t len = sizeof(client);
int fd = accept(sockfd_ , (struct sockaddr*)&client , &len);
if(fd < 0)
{
Log(Warning) << "accept failed";
}
Service(fd);
}此处我们将服务单独进行了封装,方便后面接入多线程/多进程。
服务器的类编写完成,后面再进行拓展,当前先进行以下简单测试:
编写一个源文件来运行一下服务器:在执行的时候,必须给出端口号。
cpp
void Menu(char* argv[])
{
std::cout << "\r" << argv[0] << " [port] " << "\n";
}
int main(int argc , char* argv[])
{
if(argc != 2)
{
Menu(argv);
exit(1);
}
uint16_t port = std::stoi(argv[1]);
Server server(port);
server.Init();
server.Start();
return 0;
}当前服务器编写完成了,但是客户端还没进行实现。如果想对服务端进行测试的话,可以先使用telnet工具,绑定本地环回地址127.0.0.1进行测试,但是只能起到本地通信的作用,不会将信息推送到网络中。
下一步就是编写客户端了:
客户端的编写就比较简单了:
- 创建套接字;
- 发送连接请求;
- 连接成功,发送数据;
- 接收数据。
与服务端的编写类似,只不过要用到connect接口:
cpp
void Menu(char *argv[])
{
std::cout << argv[0] << " [ip] " << " [port] " << std::endl;
}
int main(int argc, char *argv[])
{
if (argc != 3)
{
Menu(argv);
exit(1);
}
std::string ip = argv[1];
uint16_t port = std::stoi(argv[2]);
// 1.创建套接字
int sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (sockfd < 0)
{
std::cerr << " socket failed ";
exit(2);
}
// 2.发送连接请求
struct sockaddr_in server;
server.sin_family = AF_INET;
server.sin_port = htons(port);
inet_aton(ip.c_str(), &server.sin_addr);
int n = connect(sockfd, (sockaddr *)&server, sizeof(server));
if (n < 0)
{
std::cerr << " connect failed ";
exit(2);
}
// 3.进行通信
std::string message;
char buffer[1024];
while (1)
{
std::cout << "Please Enter@";
std::getline(std::cin, message);
write(sockfd, message.c_str(), message.size());
n = read(sockfd, buffer, sizeof(buffer) - 1);
if (n > 0)
{
buffer[n] = 0;
std::cout << buffer << std::endl;
}
if (message == "quit")
break;
}
close(sockfd);
return 0;
}以上就是客户端和服务端的所有代码编写,只不过给服务端只能处理一个用户端。
为了能够同时处理多个用户端,此处我们需要使用多进程或多线程来实现。
TCP + 多进程
- 父进程创建子进程,让子进程来与客户端进行交互;
- 父进程只负责与子进程建立连接。
此处需要考虑子进程的回收问题,我们并不希望对子进程进行等待,因此有两种方案:
- 直接将
SIGCHLD信号进行屏蔽; - 使用孙子进程来完成与客户端通信,子进程直接回收;
此处我们采用孙子进程的方式直接回收子进程,让孙子进程被超卓系统领养。
此处我们仅需要对服务端类中得Start进行修改即可:
cpp
void Start()
{
// 1. 建立连接
// 2. 读取消息
// 3. 对消息进行处理,并返回
while (1)
{
struct sockaddr_in client;
socklen_t len = sizeof(client);
int fd = accept(sockfd_, (struct sockaddr *)&client, &len);
if (fd < 0)
{
Log(Warning) << "accept failed";
}
// 使用多进程来实现
pid_t id = fork();
if (id < 0)
{
Log(Fatal) << "fork failed";
}
else if (id == 0)
{
close(sockfd_);
if (fork() == 0) // 使用孙子进程进行通信
{
Service(fd);
exit(0);
}
exit(0);
}
// 父进程直接将fd关闭,不允许父进程与客户端进行通信
close(fd);
pid_t rid = waitpid(id, nullptr, 0); // 回收子进程
}
}以上就是多进程服务端的修改,也很简单。
TCP + 线程池
- 主线程先任务队列中添加任务,而线程池中的线程负责将任务取出来,执行。
引入线程池,向任务队列中放什么???
有两种方案:
- 对Task任务类进行从写;
- 向任务队列中放函数对象,让线程能够直接调用。
此处两种方法都实现一下:
重写Task任务
- 我们希望主线程构建一个Task任务,加入到任务队列中,然后线程池中的线程拿出来执行。
- 线程池中的线程如果想与用户端进行通信,就必须拿到文件描述符,因此Task类私有成员有一个文件描述符。
- task任务的调用运算符重载,应该变成原来的
Service函数实现.
重写如下:
cpp
class Task
{
public:
Task(const int &fd)
: fd_(fd)
{
}
void operator()()
{
char buffer[1024];
while (1)
{
memset(buffer, 0, sizeof(buffer));
int n = read(fd_, buffer, sizeof(buffer) - 1);
if (n > 0)
{
buffer[n] = 0;
std::string ret = "I have got your message : " + std::string(buffer);
write(fd_, ret.c_str(), ret.size());
if (strcmp(buffer, "quit") == 0)
break;
}
else if (n == 0)
{
close(fd_);
break;
}
else
{
Log(Level::Error) << "read error";
close(fd_);
break;
}
}
}
private:
int fd_;
};下一步就是对服务端的Start的函数进行重写,主线程负责向线程池放入Task对象:
cpp
void Start()
{
// 1. 建立连接
// 2. 读取消息
// 3. 对消息进行处理,并返回
std::unique_ptr<thread_poll<Task>>& ptp = thread_poll<Task>::GetInstance();
ptp->run();
while (1)
{
struct sockaddr_in client;
socklen_t len = sizeof(client);
int fd = accept(sockfd_, (struct sockaddr *)&client, &len);
if (fd < 0)
{
Log(Level::Warning) << "accept failed";
}
// 父进程直接将fd关闭,不允许父进程与客户端进行通信
ptp->push(Task(fd));
}
}通过这种方式,就实现了主线程向任务队列中放数据,由线程池中的线程来与用户端进行沟通。
放函数对象
我们已经有现成的函数调用对象了,就是服务端中的Service函数,但是如果线程池中的线程并没有在该函数中,因此也就没有this指针了,所以我们在传函数对象的时候,可以使用std::bind进行绑定,将this指针绑定到函数对象中,这样线程池中的线程就可以直接进行调用了。
我们只需要对Service函数进行绑定,保证线程池中的线程在调用的时候,不需要传递任何参数,可以直接调用即可:
cpp
void Start()
{
// 1. 建立连接
// 2. 读取消息
// 3. 对消息进行处理,并返回
using fun_t = std::function<void()>;
std::unique_ptr<thread_poll<fun_t>>& ptp = thread_poll<fun_t>::GetInstance();
ptp->run();
while (1)
{
struct sockaddr_in client;
socklen_t len = sizeof(client);
int fd = accept(sockfd_, (struct sockaddr *)&client, &len);
if (fd < 0)
{
Log(Level::Warning) << "accept failed";
}
// 父进程直接将fd关闭,不允许父进程与客户端进行通信
fun_t func = std::bind(&Server::Service , this , fd); // 绑定this指针和文件描述符
ptp->push(func);
}
}以上两种方法都比较常用,后一种方法实现上更简单一些。
客户端重连
当服务端挂掉或者读写出错时,我们上面的客户端会直接退出;当服务端出现问题的时候,我们并不应该将客户端直接退出,而是让客户端进行重连,即重新向服务端发送建立连接的请求。
下面我们将进行模拟实现,客户端重连的机制:
- 客户端重连,必定需要进行循环;当服务端挂掉时,让客户端重新进行
connect尝试重新建立连接; - 我们也不能一直让客户端进行连接,当尝试连接的次数达到一定限制时,才让客户端退出。
下面时修改后的代码实现,我们的主循环内部有两个循环,一个用来控制重连的次数,另一个用来与服务端建立联系。
cpp
void Menu(char *argv[])
{
std::cout << argv[0] << " [ip] " << " [port] " << std::endl;
}
int main(int argc, char *argv[])
{
if (argc != 3)
{
Menu(argv);
exit(1);
}
std::string ip = argv[1];
uint16_t port = std::stoi(argv[2]);
struct sockaddr_in server;
server.sin_family = AF_INET;
server.sin_port = htons(port);
inet_aton(ip.c_str(), &server.sin_addr);
while (1)
{
int cnt = 0, n = 0 , sockfd = -1;
const int max_cnt = 6;
do
{
// 1.创建套接字
sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (sockfd < 0)
{
std::cerr << " socket failed ";
exit(2);
}
// 2.connext
n = connect(sockfd, (sockaddr *)&server, sizeof(server));
if (n < 0)
{
std::cout << "connet failed : " << cnt++ << std::endl;
sleep(1);
}
else
break;
} while (cnt < max_cnt);
if (cnt == max_cnt)
{
std::cout << "server error" << std::endl;
return 0;
}
// 3.进行通信
std::string message;
char buffer[1024];
while (1)
{
std::cout << "Please Enter@";
std::getline(std::cin, message);
write(sockfd, message.c_str(), message.size());
n = read(sockfd, buffer, sizeof(buffer) - 1);
if (n > 0)
{
buffer[n] = 0;
std::cout << buffer << std::endl;
}
else
break;
if (message == "quit")
{
close(sockfd);
return 0;
}
}
}
return 0;
}客户端在直接进行连接的时候,会出现连接失败,因核心原因是 服务器重启时,原端口因 TCP TIME_WAIT 状态被占用,导致无法重新绑定端口(监听失败)。
所以我们需要对服务器进行设置:在服务器的 socket 创建后、bind 前,添加 端口复用选项:
cpp
int opt = 1;
setsockopt(sockfd_, SOL_SOCKET, SO_REUSEADDR|SO_REUSEPORT, &opt, sizeof(opt));
// 防止偶发性的服务器无法进行立即重启进程组与守护进程
在操作系统中我们有前台进程和后台进程;
- 通过
jobs指令可以查看后台进程; fg + 任务号:将后台进程拿到前台;
但前台进程被暂停后,如果向前台进程发送19号信息,即SIGSTOP时,前台进程会被自动移动到后
台进程,此时bash命令行解释器会被移动到前台。
bg + 任务号,将后台暂停的进程继续执行。
在设计服务器的时候,我们希望服务器是后台进程,并且不受到用户的登录和退出的影响;
下面解释如何做到:
进程组和会话
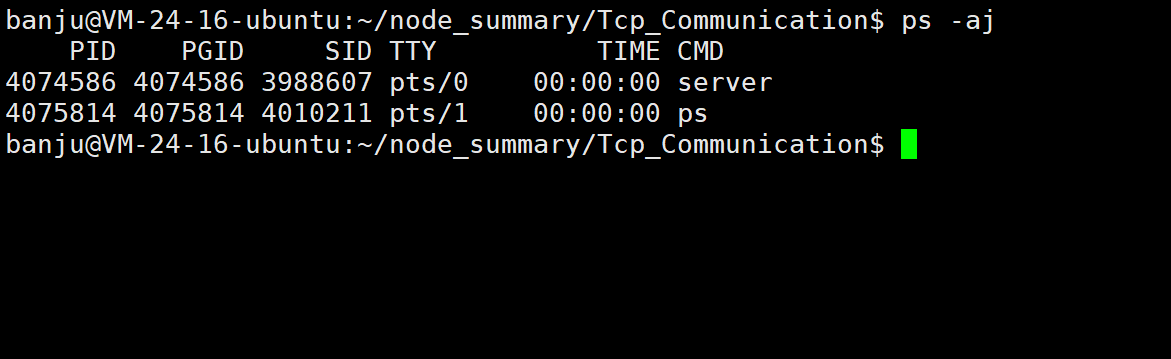
- 在操作系统中有一个进程组的概念,进程组是一个或多个进程的集合,进程组中有一个组长:PID==PGID就是组长;
- 组长负责创建一个进程组或者在进程组中创建进程;该组长进程执行完毕,并不会影响组内其他进程的执行;
一个进程组中的进程协作来完成任务,最常见的就是通过管道执行命令,管道中的所有命令都属于一个进程组。
可以通过ps aj来查看进程的相关ID信息:
- 在操作系统中又定义了session会话的概念,session指的是一个或多个进程组。
- 通常默认一个会话与一个终端进行关联,在操作系统中会有一个初始会话,该会话与终端直接建立联系,控制终端可以向初始会话中的进程发送信号,同时当控制终端退出的时候,内部的所有进程,进程组都会被退出,这就会导致我们的服务器也会退出。
但是好在,当我们创建一个新会话的时候,新会话默认没有控制终端,这也就保证了新会话不受终端的登录和退出的控制。
因此只要让服务端自成一个新会话,就可以保证服务端持续运行。该进程不再与键盘关联,不受到登录和注销的影响,这种进程就被称为守护进程。下面看看守护进程如何实现。
守护进程
- 一个进程组的组长不能自成会话,也就不能当守护进程。
因此在自成会话的时候,需要时子进程,让父进程直接退出,子进程作为孤儿进程 自成会话。
我们通过pid_t setsid(void)来让一个进程自成会话。
- 一般我们会选择将守护进程的一些信号进行忽略,防止收到信号影响;
- 并且一般会更改目录,以及输入输出,将输入输出定向到
/dev/null中。
现在让我们来实现守护进程:
cpp
const std::string defaultdir = "/";
const std::string nullfile = "/dev/null";
void Deamon(bool ischdir , bool isclose)
{
// 1.忽略信号
signal(SIGPIPE , SIG_IGN);
signal(SIGPIPE , SIG_IGN);
signal(SIGSTOP , SIG_IGN);
// 2. 自成会话
if(fork() > 0 ) exit(0); // 父进程直接退出
setsid();
if(ischdir)
chdir(defaultdir.c_str());
if(isclose) // 是否关闭文件
{
close(0);
close(1);
close(2);
}
else
{
int fd = open(nullfile.c_str() , O_RDWR);
dup2(fd , 0);
dup2(fd , 1);
dup2(fd , 2);
}
}以上就是自己实现的守护进程接口。
实际上操作系统也提供了接口,让一个进程自成会话int daemon(int nochdir , int noclose),在这里就不再介绍了。