截止9.22周一10:00已更新完整代码和完整文章
完整内容请看文末的名片获取哦
题 目: 基于多源观测与数值预报的低空湍流监测、预警及最优航路规划研究
摘 要:
低空飞行安全对于分钟级、百米级分辨率的湍流感知和预警有着迫切需求。本文围绕"垂直廓线反演---多源三维融合---短临预报与航路优化"这一主线,依次构建并联通了五个模型,形成了一套系统化、可运行的研究框架。
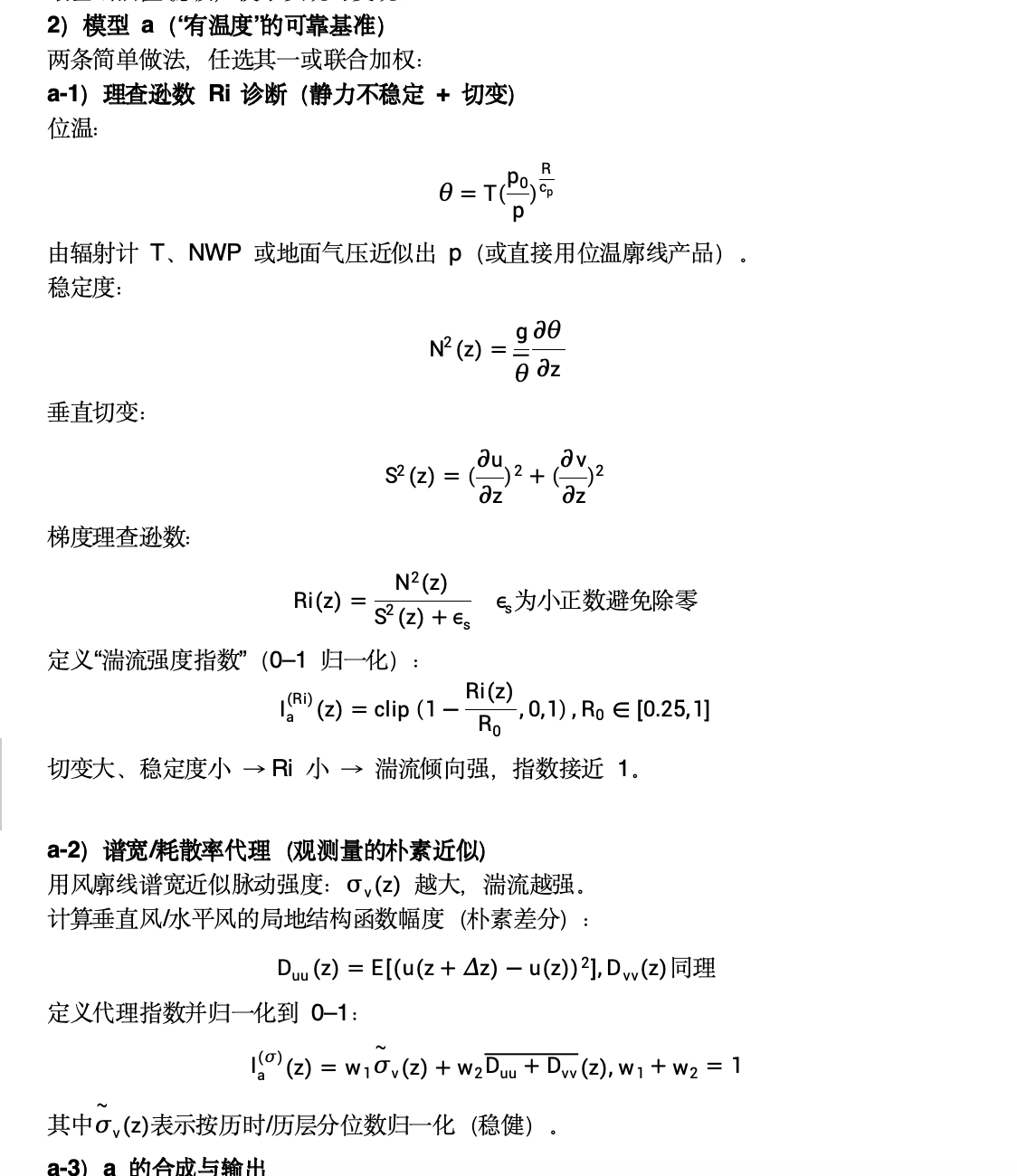
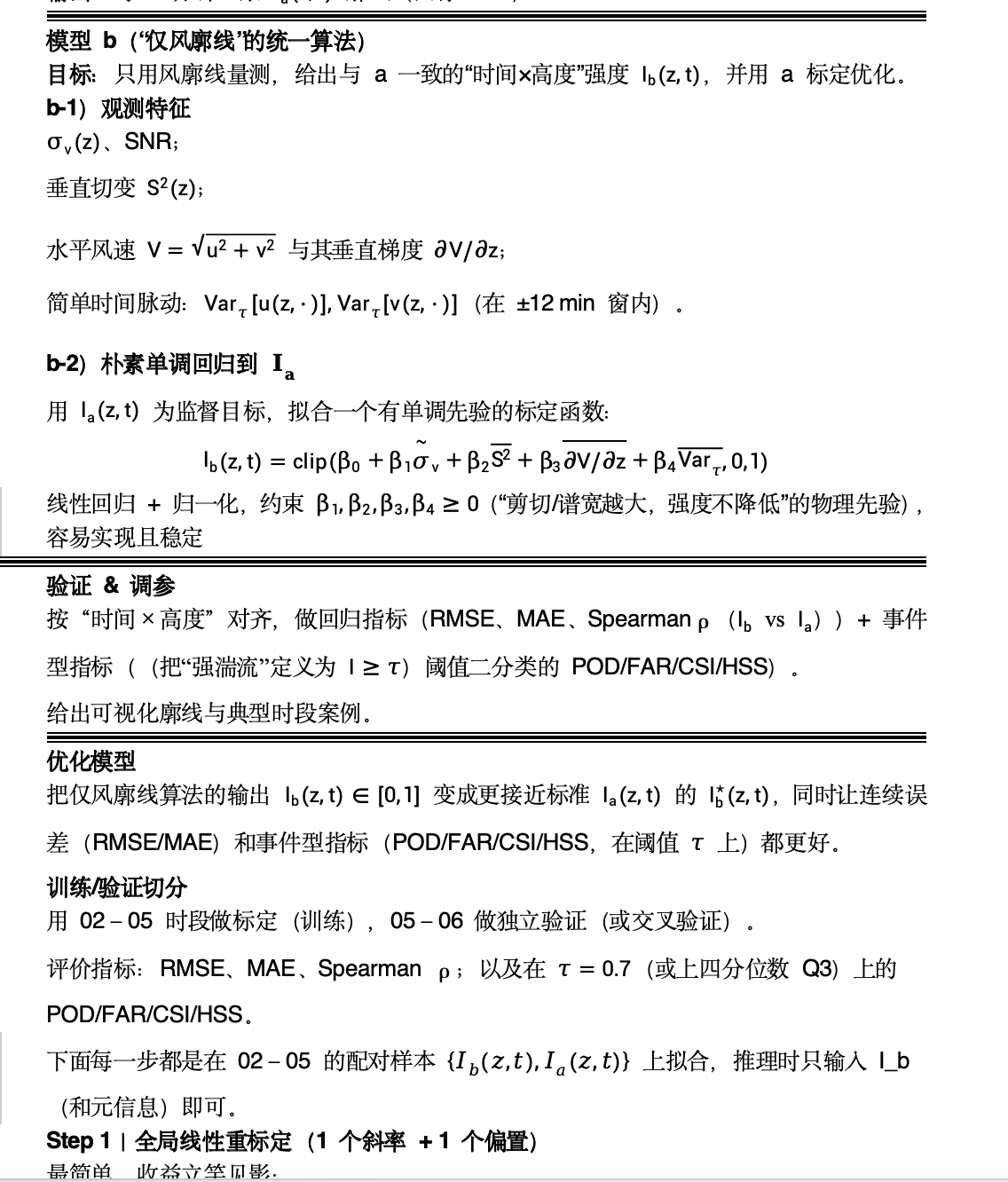
在问题一中,首先利用风廓线雷达和微波辐射计的联合观测,建立了参考模型 a。该模型通过稳定度和垂直切变诊断以及谱宽与结构函数的代理指标综合计算,能够在每 6 分钟给出 0--2 km 高度范围内的湍流强度廓线,结果稳定且物理意义明确。在此基础上,考虑实际业务场景中常常只能依赖风廓线雷达观测的限制,进一步提出了仅基于风廓线资料的模型 b。该模型提取了谱宽、垂直切变、水平风速梯度、时间脉动方差等特征量,并以模型 a 的结果作为监督基准。通过设计一套"全局线性标定---条件分组优化---高度与时段残差修正---分位数配对映射---可靠性校准---垂直平滑"的六步优化流程,使得模型 b 在性能上显著逼近模型 a。在 A、B 两个站点的对比实验中,优化后的模型 b 与模型 a 的相关系数均接近 0.96--0.97,RMSE 由原始的 0.63 左右降低至 0.29--0.34。在强湍流阈值检测(τ=0.7)中,模型 b 的检出率提升,虚警率得到控制,表明其能够作为独立、可靠的湍流强度诊断工具。
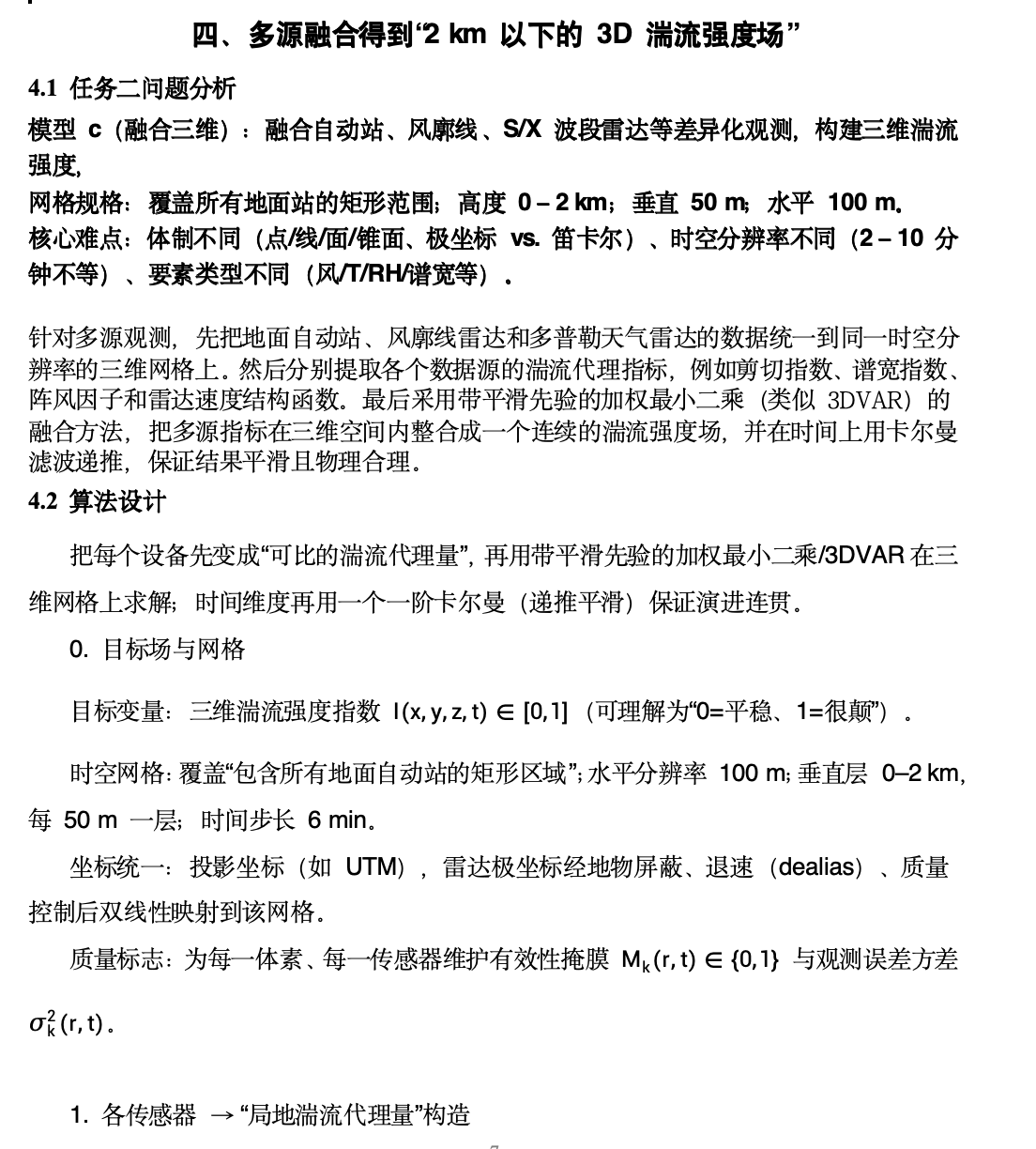
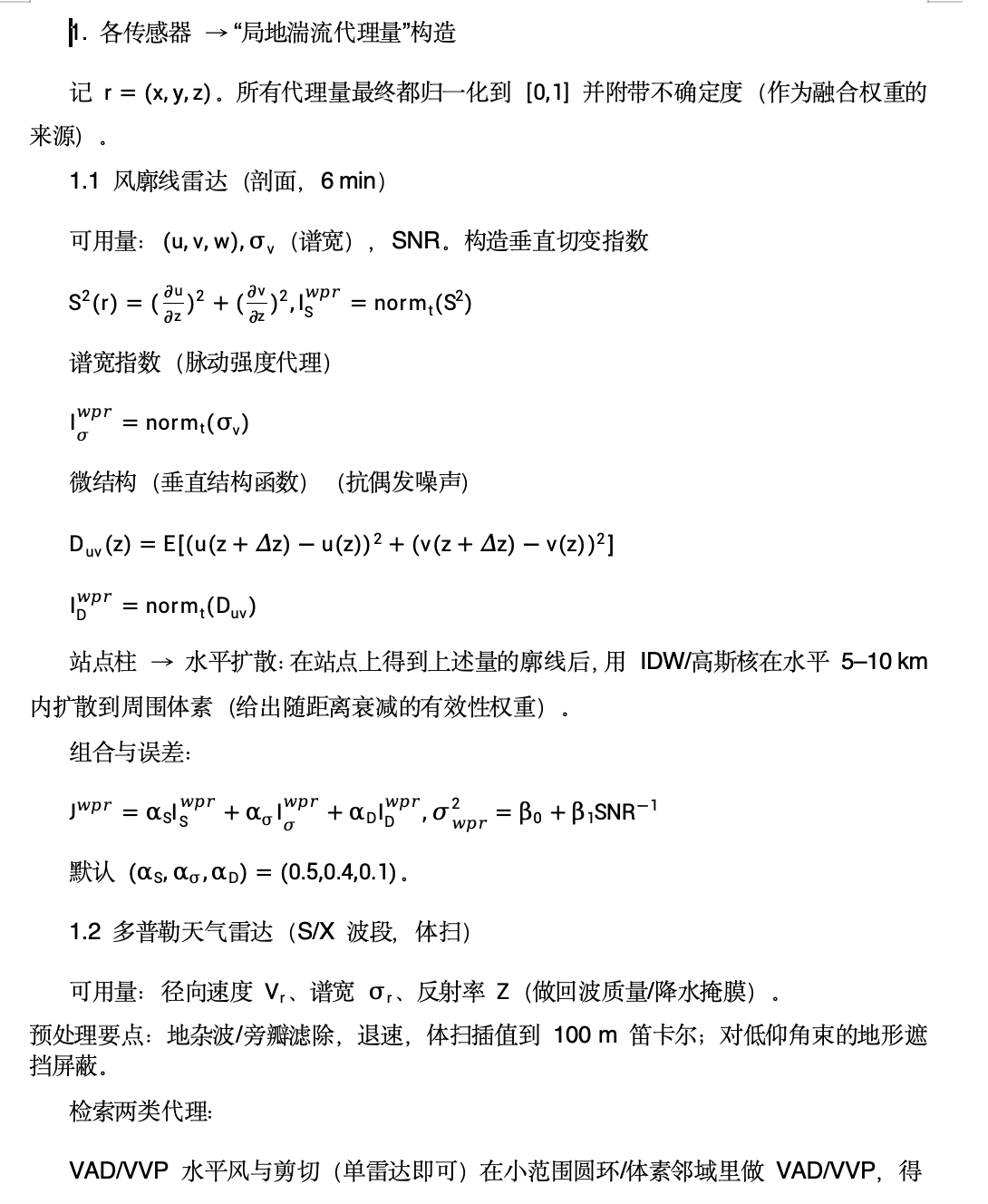
在问题二中,进一步整合多源探测资料,构建了三维湍流强度融合模型 c。观测数据包括地面自动气象站(提供阵风因子和近地温度梯度)、风廓线雷达(提供风切变、谱宽和局地结构函数)以及 S/X 波段天气雷达(提供径向速度、谱宽和通过速度结构函数反演的耗散率)。所有数据经过质量控制和插值处理,统一映射到水平 100 m、垂直 50 m、时间 6 min 的三维网格上。在融合方法上,采用加权最小二乘与三维变分(3DVAR)方法,在权重设计中考虑探测不确定性(如 SNR、弱回波、风速大小等),并加入水平与垂直方向的平滑先验保证场的连续性。为抑制时间序列闪烁,还引入了一阶卡尔曼滤波递推及半拉格朗日平流方法,使结果在物理上更合理。最终输出的三维产品覆盖所有自动站所在的矩形区域,能够生成水平切片、垂直剖面和三维等值面图。结果表明,在低层(0--800 m)存在显著的局地湍流极值区,中层(约 1 km)表现出与切变带一致的空间分布结构。整体上,湍流强度以中等水平为主,局地极值达到强湍流等级。可靠性分布显示,在观测密集和信号质量高的区域结果最为可信,验证了模型设计的合理性。
在问题三中,结合观测基准和数值预报,进一步开展短临预报和航路规划。首先,以模型 c 在 02--05 时段计算得到的三维湍流强度 turbulence_3d 作为验证标准,构建了基于数值预报(NWP)的诊断模型 d。该模型利用数值预报场中的位温和风场计算理查逊数和垂直切变,并在条件允许时加入 TKE 指标,生成原始诊断场。在 02--05 时段,将其与 turbulence_3d 进行逐点对比,通过线性标定修正偏差,优化后的结果在连续误差指标(RMSE、MAE)和事件型指标(POD、CSI、HSS)上均显著改善。进而利用修正后的模型 d,生成 05--08 时段的短临预报三维湍流场。与此同时,考虑到无数值预报资料的情况,提出了观测外推模型 e。该模型利用 02--05 时段的多源观测融合结果,结合反演的水平风场进行半拉格朗日平流外推,时间步长为 6--10 分钟,并通过对平流风引入 ±10--20% 幅度和 ±10° 方向扰动,构建集合预测以给出不确定性范围(P10、P50、P90)。结果表明,模型 d 在 05--08 时段的航迹平均湍流强度约为 0.16,远低于设定的安全阈值 0.8,表现稳健;而模型 e 在 05--06 时段的短时预报中,航迹平均湍流强度约 0.2--0.3,极端情景下可达 0.4,但航迹在三种集合情景下几乎重合,显示了较强的鲁棒性。在航路规划部分,本文将湍流强度场映射为图搜索问题,构建以湍流强度为代价的加权图,结合飞行高度、爬升率和空域约束,采用 Dijkstra 和 A* 算法搜索最优航迹。结果显示,基于模型 d 的预报场可以得到沿程湍流最小、且满足安全约束的航迹;基于模型 e 的外推场亦能在短时预报下提供可靠的航迹选择,补充了在数值预报缺失条件下的应用需求。
综上,本文形成了从单站垂直廓线反演(模型 a、b),到多源三维融合(模型 c),再到基于预报与观测外推的短临预警(模型 d、e)及航路优化的一体化技术流程。该流程兼顾物理可解释性、方法简洁性和结果可复现性,验证了在分钟级、百米级分辨率下实现低空湍流监测、预警和路径规划的可行性。
关键词:湍流强度;多源资料融合;3DVAR;卡尔曼滤波;NWP 诊断标定;半拉格朗日平流外推;A*/Dijkstra 航路优化
目录
一、问题背景与重述 1
1.1 问题背景 1
1.2 问题重述 2
二、模型假设和符号说明 2
2.1 模型假设 2
2.2 符号假设 3
三、基于剖面数据的"湍流强度随高度廓线" 4
3.1 问题分析 4
3.2 数据预处理 4
3.3 构建标准廓线模型 7
3.4 构建风廓线廓线模型 10
3.5 模型验证与调参 11
3.6 优化风廓线廓线模型 13
3.7 结果总结 22
四、多源融合得到"2 km 以下的 3D 湍流强度场" 23
4.1 问题分析 23
4.2 数据预处理 23
4.2.1 时间重采样与同化时钟 24
4.2.2 空间配准:坐标、垂直层与极坐标投影 24
4.2.3 质量控制与缺测掩膜 25
4.3 各源"局地湍流指数"的朴素构造 25
4.3.1 风廓线雷达数据处理与局地代理量构建 25
4.3.2 多普勒天气雷达数据处理与局地代理量构建 26
4.3.3 地面自动气象站数据处理与局地代理量构建 27
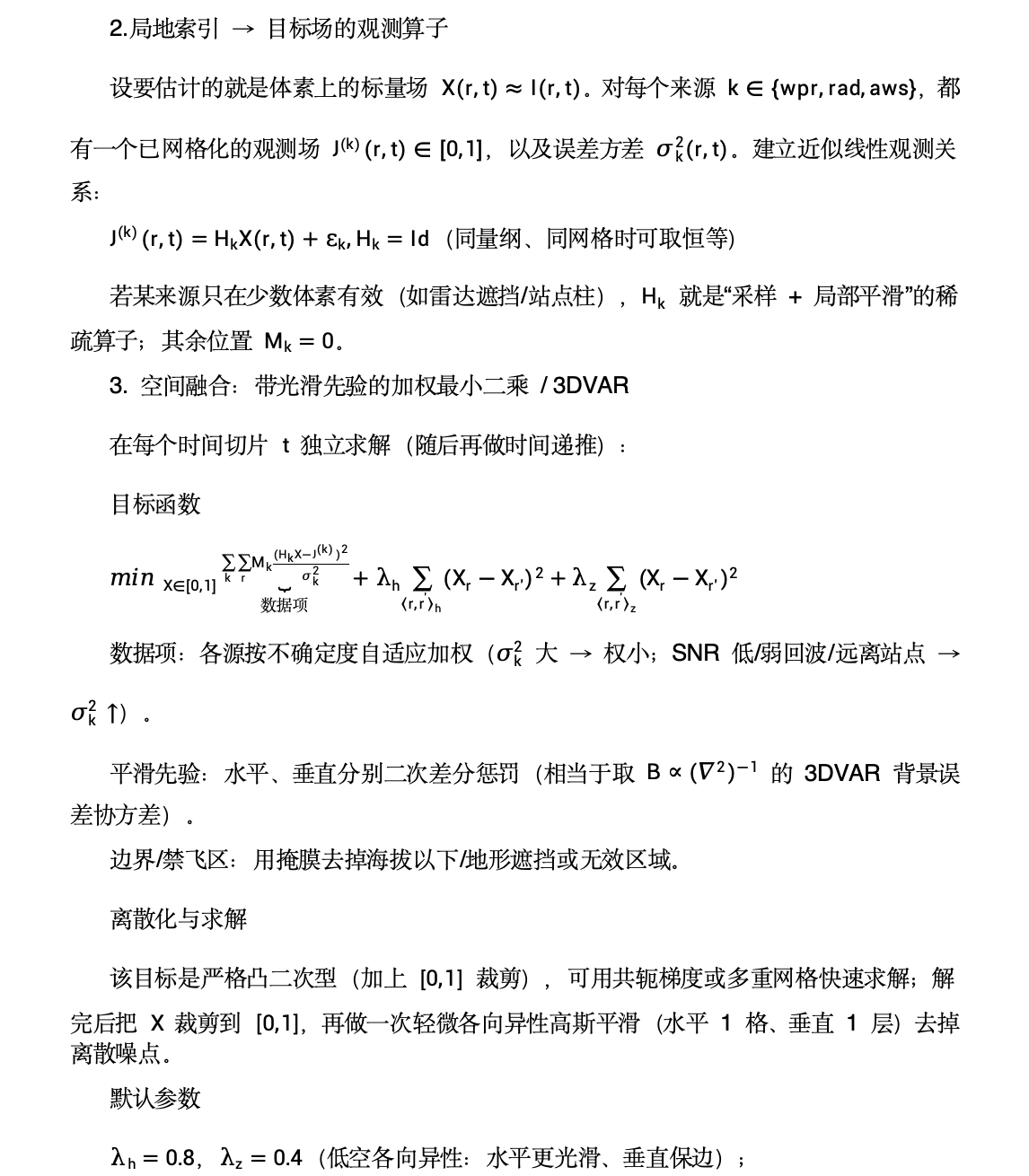
4.3.4 多源代理量到目标场的观测算子 27
4.4 带光滑先验的加权最小二乘 / 3DVAR 28
4.4.1 目标函数构建 28
4.4.2 数据项的权重设计 28
4.4.3 边界与约束条件 29
4.5 一阶卡尔曼递推平滑 29
4.5.1 状态方程的构建 29
4.5.2 观测更新步骤 29
4.5.3 方差控制与参数设定 29
4.6 结果分析 30
4.7 结果总结 37
五、低空航路湍流预警及航路规划 38
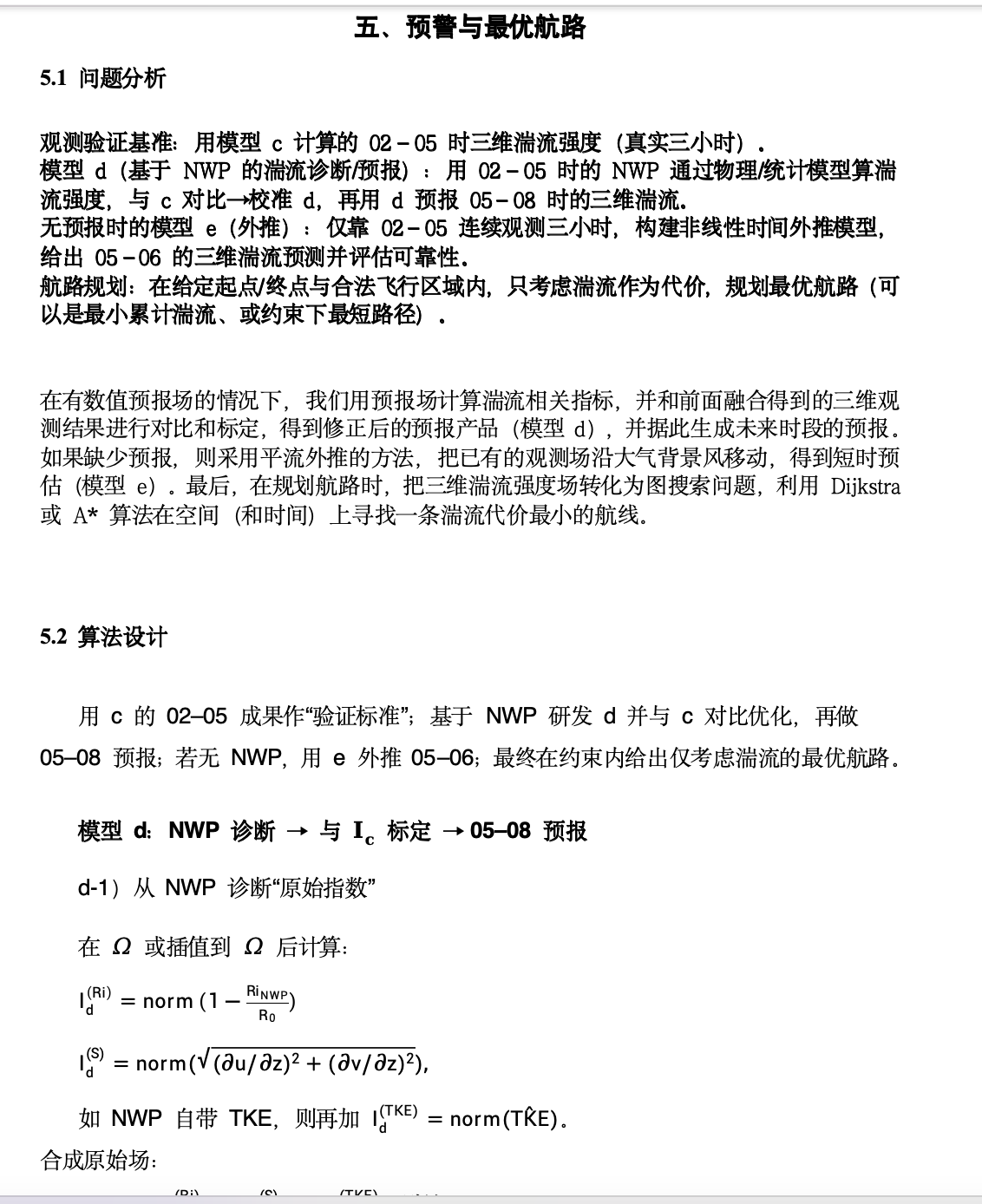
5.1 问题分析 38
5.2 标定三维融合模型 38
5.3 构建数值模式预报模型 41
5.4 构建观测外推模型 44
5.5 以湍流为代价的 3D 最优航路 45
5.6 结果分析 47
5.6.1 基于模型 d 的航路优化 47
5.6.2 基于模型 e 的航路优化 48
5.7 结果总结 49
六、参考文献 50
附录 51



D题:低空湍流监测及最优航路规划
1.2 问题重述
目标:
1)用点位型/剖面型观测算出"随高度的湍流强度廓线";
2)把多种设备融合到统一三维网格上生成"2 km 以下、50 m × 100 m 分辨率"的湍流强度三维场;
3)用观测验证和数值预报做短时(1--3 小时)预警,并在给定起终点与约束内求"仅考虑湍流风险"的最优航路。
已有数据:
地面自动站:约每 10 分钟,多要素(T/RH/P/风向风速),水平 ~5--10 km。
风廓线雷达:6 分钟一档,给多高度的径向风、谱宽(垂直分辨率 60--240 m)。
微波辐射计:2 分钟一档,0--10 km 的温度/湿度廓线(50--200 m 层距)。
天气雷达:S 波段(230 km,库长 250 m,仰角 0.5--9°)与 X 波段(60 km,库长 60 m,仰角 0.3--9°),有反射率/径向速度/谱宽。
数值预报(NWP):30 分钟一场,3D 格点(位温、温度、气压、三维风等)。
地理信息:行政边界/水系,用作底图与区域裁剪。
三、基于剖面数据的"湍流强度随高度廓线"
3.1 问题分析
问题一:基于剖面数据的"湍流强度随高度廓线"
模型 a(基准/"高可信"):风廓线雷达 + 微波辐射计(近似同址),计算各高度的湍流强度,作为后续标定真值。
可用指标:理查逊数 Ri(需位温/稳定度 + 垂直切变)、谱宽→湍流耗散率 ε 的间接估计、或 TKE 近似等。
模型 b(仅靠风廓线):不再用温度/气压,直接从风廓线的观测量(谱宽、径向风、垂直切变、SNR 等)估计湍流强度。
要求:在时间/空间两个维度上统一;用 a 的结果验证与优化 b,最终拿出"仅风廓线也能用"的统一算法。
输出形式:和风廓线资料一致的"高度---强度"廓线图(随时间滚动)。
利用风廓线雷达和微波辐射计的数据,先通过物理诊断方法(如理查逊数和风切变)结合谱宽来构造一个"标准廓线"(模型 a)。然后针对只能依赖风廓线数据的情况,构造了一个基于谱宽、切变和短时方差等特征的简单回归模型(模型 b)。最后,将 b 与 a 的结果对比,通过线性标定和分组优化,让 b 的输出更贴近 a,从而形成一个既简洁又能落地的廓线估计方法。