目录
[一、引言:为什么要做触觉传感的 Sim-to-Real?](#一、引言:为什么要做触觉传感的 Sim-to-Real?)
[3.1 第一步:构建 "又快又准" 的 3D FEM 仿真模型(核心是还原 BioTac 传感器的接触变形)](#3.1 第一步:构建 “又快又准” 的 3D FEM 仿真模型(核心是还原 BioTac 传感器的接触变形))
[3.1.1 工具选择:GPU-based 模拟器 Isaac Gym](#3.1.1 工具选择:GPU-based 模拟器 Isaac Gym)
[3.1.2 模型几何结构设计:4 种方案筛选最优](#3.1.2 模型几何结构设计:4 种方案筛选最优)
[3.1.3 材料参数优化:校准到与现实一致](#3.1.3 材料参数优化:校准到与现实一致)
[3.2 第二步:自监督学习 "模态专属潜在表示"(核心是压缩数据,提取关键特征)](#3.2 第二步:自监督学习 “模态专属潜在表示”(核心是压缩数据,提取关键特征))
[3.2.1 模型选择:变分自编码器(VAE)](#3.2.1 模型选择:变分自编码器(VAE))
[3.2.2两种模态的 VAE 设计](#3.2.2两种模态的 VAE 设计)
[3.2.3 训练数据:大量无标签数据支撑](#3.2.3 训练数据:大量无标签数据支撑)
[3.3 第三步:监督学习 "跨模态潜在空间投影"(核心是打通两个潜在空间,实现 Sim-to-Real)](#3.3 第三步:监督学习 “跨模态潜在空间投影”(核心是打通两个潜在空间,实现 Sim-to-Real))
[3.3.1 先搞懂:为什么需要 "监督学习" 和 "配对数据"?](#3.3.1 先搞懂:为什么需要 “监督学习” 和 “配对数据”?)
[3.3.2 拆解:3 步训练 "翻译官",打通两个潜在空间](#3.3.2 拆解:3 步训练 “翻译官”,打通两个潜在空间)
[3.3.3 训练 "翻译官":用手册教,且不让 "语言本身变味"(冻结 VAE 是关键)](#3.3.3 训练 “翻译官”:用手册教,且不让 “语言本身变味”(冻结 VAE 是关键))
[3.3.4 最终成果:两个 "精准翻译官",实现 Sim-to-Real](#3.3.4 最终成果:两个 “精准翻译官”,实现 Sim-to-Real)
[4.1 A. FEM Validation(FEM 模型验证):确保 "虚拟传感器和真实一样"](#4.1 A. FEM Validation(FEM 模型验证):确保 “虚拟传感器和真实一样”)
[4.2 B. Learning-Based Regression and Estimation(基于学习的回归与估计):验证 Sim-to-Real 双向映射](#4.2 B. Learning-Based Regression and Estimation(基于学习的回归与估计):验证 Sim-to-Real 双向映射)
[4.2.1 实验 1:正向回归 ------ 从仿真变形 "合成" 现实电信号](#4.2.1 实验 1:正向回归 —— 从仿真变形 “合成” 现实电信号)
[4.2.2 实验 2:反向回归 ------ 从现实电信号 "反推" 仿真变形](#4.2.2 实验 2:反向回归 —— 从现实电信号 “反推” 仿真变形)
[4.3.3 实验 3:实际应用 ------ 接触区域估计](#4.3.3 实验 3:实际应用 —— 接触区域估计)
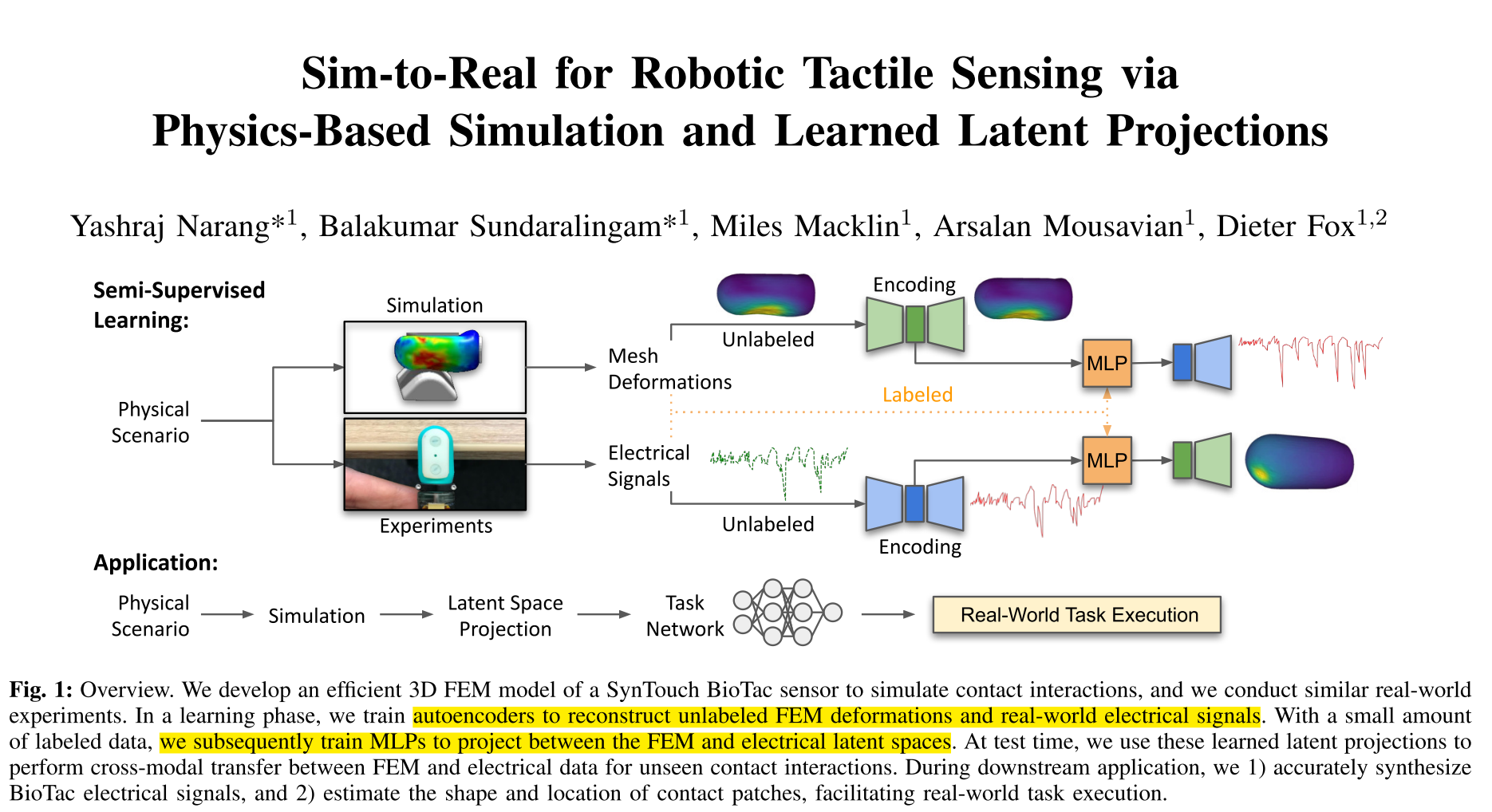
这篇文章聚焦机器人触觉传感的核心难题 ------ 如何让仿真数据准确对应现实传感器信号(即 "Sim-to-Real 仿真到现实"),以 SynTouch BioTac 仿生触觉传感器为研究对象,结合 "基于物理的有限元仿真(FEM)" 和 "机器学习的潜在空间投影",实现了触觉信号的精准合成与接触区域估计。
图1中左边是 "数据来源"------ 分为两部分:
- 仿真端:用 3D FEM 模型模拟 BioTac 传感器的接触变形(比如被物体挤压时的皮肤变形);
- 现实端:用真实 BioTac 传感器做实验,采集接触时的电信号(传感器把皮肤变形转成电信号输出)。
中间是 "学习阶段"------ 解决 "仿真变形" 和 "现实电信号" 的跨模态映射问题:
- 自监督学习:用大量无标签数据训练 "自编码器"(一种能压缩数据又还原的模型),把仿真的 "变形网格"(复杂数据)压缩成简洁的 "仿真潜在特征(Latent Space)",把现实的 "电信号"(19 个电极的输出)压缩成简洁的 "电信号潜在特征";("潜在空间" 可以理解为 "数据的精华版":去掉冗余噪声,只留关键特征,比如变形的形状、电信号的峰值规律)
- 少量监督学习:用少量有标签数据(即 "仿真变形" 和对应的 "现实电信号" 配对数据),训练两个小模型(MLP),实现 "两个潜在空间的投影"------ 既能从仿真特征推电信号特征,也能从电信号特征推仿真特征。
右边是**"应用阶段"**------ 用学到的投影做两件事:
- 合成现实电信号:给仿真一个新的接触变形,能输出和真实传感器一样的电信号;
- 估计接触区域:给真实传感器一个电信号,能反推出传感器的变形,进而知道 "物体接触的位置和形状",帮机器人完成抓握、操作等任务。
摘要核心结论:他们的 FEM 模型用 GPU 模拟器(Isaac Gym),比传统 CPU 模拟器(ANSYS)快 75 倍还一样准;通过 "自监督 + 潜在投影",即使面对 "没见过的物体 / 接触场景",也能精准合成电信号、估计接触区域 ------ 这是首次把 "自监督""跨模态转移""Sim-to-Real" 结合用于触觉传感。
一、引言:为什么要做触觉传感的 Sim-to-Real?
触觉对机器人太重要了 ------ 比如抓鸡蛋不能捏碎、拿钥匙开门(视觉被手挡住时靠触觉找凹槽)、拧瓶盖时感知力度。但和 "机械臂仿真""摄像头仿真" 比,触觉传感器的仿真一直很拉胯:
- 之前的研究多做 "逆向问题":用电信号反推 "接触力 / 位置"(比如知道电信号,猜物体压在哪);
- 没人做好 "正向问题":从仿真的 "接触变形" 合成 "现实电信号"(这才是机器人训练需要的 ------ 仿真里练几百万次抓握,直接对应现实信号,不用每次都拿真实传感器试)。
触觉仿真难在哪?
- 计算复杂:要模拟 "皮肤弹性变形""多物体接触",传统 CPU 仿真慢到没法用;
- 跨模态鸿沟:传感器是 "变形→流体阻抗→电信号" 的链条,物理建模很难全覆盖;
- 传感器个体差异:同型号 BioTac 因为制造误差,输出信号都不一样,没法用统一模型。
这篇文章就是要解决这些问题:做一个 "又快又准还免费" 的 FEM 仿真模型,再用机器学习打通 "仿真变形" 和 "现实电信号" 的通道。
二、相关工作:我们比别人强在哪?
之前的触觉 Sim-to-Real 研究有两类,但都有短板,文章的创新点就对比出来了:
| 研究方向 | 别人的做法 | 我们的优势 |
|---|---|---|
| 视觉型触觉传感器(如 GelSight) | 用 Gazebo/Unity 简化仿真,只测 1 种物体 / 接触方向 | 用真实 FEM 模拟变形,测 17 种物体 + 多样接触角度,不用额外调参 |
| 非视觉型触觉传感器(如本文 BioTac) | 用简化模型(如 PyBullet 软接触),误差大(比如力误差 5N) | 用 GPU-FEM 模型,误差小(力误差 0.125N),且能处理 "没见过的物体" |
| 自监督 + 跨模态转移 | 学 "联合潜在空间"(把两种数据混在一起压缩) | 学 "分开的潜在空间 + 投影",用少量标签数据就行,泛化更好 |
三、方法:核心技术怎么实现?
3.1 第一步:构建 "又快又准" 的 3D FEM 仿真模型(核心是还原 BioTac 传感器的接触变形)
FEM(有限元法)是通过 "将复杂物体拆分为微小单元(如四面体)、计算每个单元的物理响应、再拼接成整体" 的方式,模拟弹性变形、接触力等物理过程。文章用这套方法还原 SynTouch BioTac 传感器(仿生触觉传感器,核心是 "橡胶皮肤 + 塑料核心")的接触行为,解决了传统触觉仿真 "慢、不准、收费" 的问题。
3.1.1 工具选择:GPU-based 模拟器 Isaac Gym
传统触觉仿真用 CPU-based 的 ANSYS(行业标准,但收费且慢),文章改用 NVIDIA 开源的 Isaac Gym 模拟器,核心优势是GPU 并行计算------ 后续验证显示,同样跑 359 次接触实验,ANSYS 需 42 小时(6 个 CPU),而 Isaac Gym 仅需 33 分钟(1 个 GPU),速度提升 75 倍,且免费。
3.1.2 模型几何结构设计:4 种方案筛选最优
BioTac 的真实结构是 "可变形橡胶皮肤包裹刚性塑料核心",因此团队设计了 4 种 FEM 几何构型(图 2A-D),通过实验筛选最贴近真实的方案:
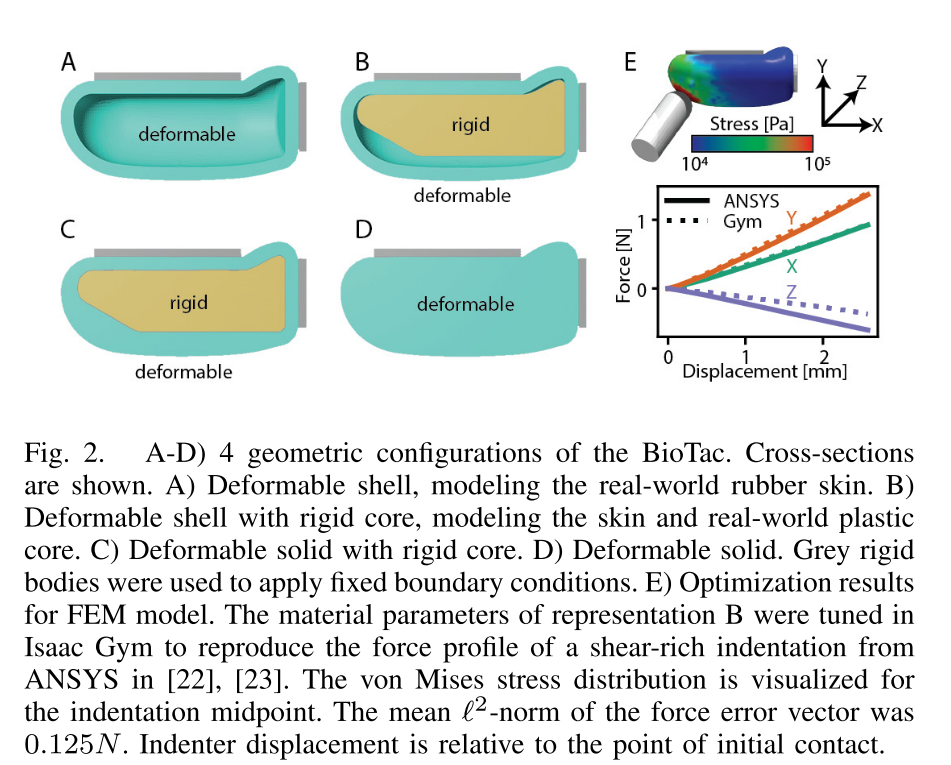
- 构型 A:仅可变形壳(模拟橡胶皮肤,无核心);
- 构型 B:可变形壳 + 刚性核心(最贴近真实结构:皮肤包裹塑料芯);
- 构型 C:可变形固体 + 刚性核心;
- 构型 D:仅可变形固体;
- 边界条件:在传感器的 "钉子" 和 "夹子" 位置,用薄刚性体固定(图 2 中灰色部分),避免仿真时传感器整体偏移()。
最终通过 "力 - 位移曲线匹配度" 筛选:构型 B 在 "358 个额外验证实验" 中误差最小,成为最终模型。
3.1.3 材料参数优化:校准到与现实一致
选好骨架后,还得调 "材料手感"------ 比如橡胶皮肤要多软、会不会滑、压的时候会不会变粗,FEM 的精度依赖 "材料参数"(描述橡胶皮肤的物理特性),团队通过 "对标 ANSYS 模型"(ANSYS 已通过真实实验验证)优化 3 个关键参数:
| 参数名称 | 日常理解 | 调参目标 |
|---|---|---|
| 弹性模量(E) | 材料 "多硬"------ 像海绵(E 小)vs 橡皮(E 大) | 虚拟橡胶皮肤的硬度,要和真的一样 |
| 泊松比(ν) | 压的时候 "会不会变粗"------ 像捏橡皮泥(ν 大,压短会变胖)vs 捏金属(ν 小,几乎不变) | 虚拟皮肤压的时候,变粗程度和真的一样 |
| 摩擦系数(μ) | 表面 "滑不滑"------ 像橡胶(μ 大,不容易滑)vs 玻璃(μ 小,容易滑) | 虚拟皮肤和物体接触时,打滑程度和真的一样 |
优化方法:用 "sequential least-squares programming(序列最小二乘法)" 最小化 "Isaac Gym 与 ANSYS 的力误差",最终力的平均误差仅 0.125N(相当于一根头发的重量),且变形场(节点位移分布)的误差仅 0.018mm,确保仿真变形与现实一致。
团队用 "对标法":拿真实传感器的 "受力数据" 当 "标准答案",让虚拟传感器往这个答案上靠。比如:
- 真实传感器被 "带棱角的物体" 挤压时,受力会先慢慢增加到 0.8N,再保持稳定;
- 虚拟传感器一开始的参数不对,受力会突然跳到 1.2N,明显不像;
- 团队就一点点调:把弹性模量从 0.4 降到 0.316,摩擦系数从 0.6 升到 0.783------ 最后虚拟传感器的受力曲线和真实的几乎重合,力的误差只有 0.125N(相当于拿一根头发的力压上去,误差比头发还轻)。
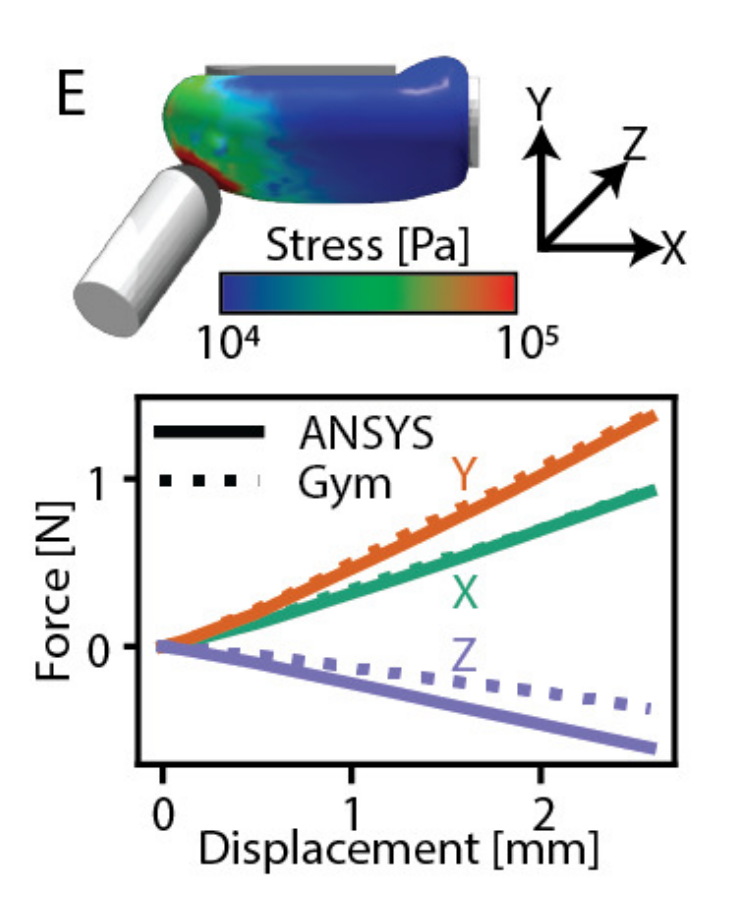
就是调参后的结果:两条线几乎粘在一起,说明 "手感" 完全一致了。
3.2 第二步:自监督学习 "模态专属潜在表示"(核心是压缩数据,提取关键特征)
第二步的核心,其实是给杂乱的数据 "提取 + 去噪"------ 把第一步里 "虚拟传感器的变形数据"(像一堆乱码的坐标)和 "真实传感器的电信号数据",分别提炼成 "简洁又有用的精华版",方便后面让模型快速学会 "变形和电信号的对应关系"。
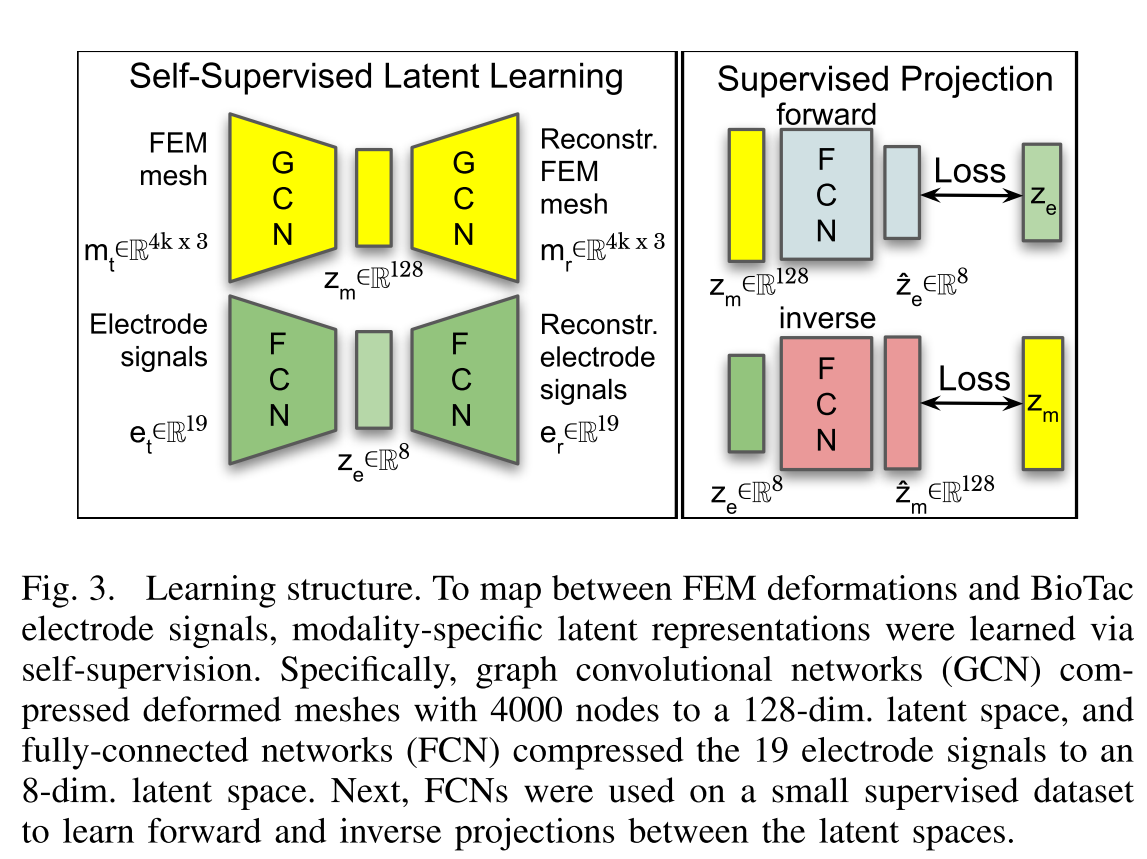
FEM 输出的 "变形数据"(4000 个节点的 3D 坐标,维度 4k×3)和现实采集的 "电信号数据"(19 个电极的输出,维度 19)均为 "高维、含噪声" 数据,直接映射会导致 "过拟合(记不住泛化)"。因此团队用 "自监督学习"(无需标签,仅用数据自身特征训练),将两种数据分别压缩为 "低维、去噪" 的 "潜在表示"(可理解为 "数据的精华版")。
3.2.1 模型选择:变分自编码器(VAE)
选用 VAE 而非普通自编码器,是因为 VAE 能生成 "平滑的潜在空间"------ 相似的输入会对应相近的潜在特征,避免后续投影时出现 "跳跃式误差"。VAE 的核心逻辑是 "先压缩(编码器)、再还原(解码器)",通过 "还原误差最小化" 确保压缩后保留关键特征。
3.2.2两种模态的 VAE 设计
(1)FEM 变形网格的 VAE:用 GCN 处理 "图结构数据"
-
第一步:"读规律"(GCN 编码器)变形数据的关键规律是 "哪些点离接触点近、变形大"------ 比如用手指压虚拟传感器,接触点周围的 100 个点会明显凹陷,其他 3900 个点几乎不动。GCN 会 "扫描" 这 4000 个点的位置变化,找出 "变形大的点在哪、变形有多强" 这些关键规律,然后把 12000 个数字(4000 点 ×3 坐标),压缩成 128 个数字(比如 "接触点在左边,变形最大 0.2 毫米" 对应数字 0.8, 0.1, ..., 0.3)。这 128 个数字就是变形数据的 "精华版",叫 "FEM 潜在特征(z_m)"。
-
第二步:"验效果"(GCN 解码器)压缩完不能不管对错,得 "解压看看"------VAE 会把 128 个数字的 "精华",再还原成 4000 个点的 3D 坐标,然后对比 "还原的变形" 和 "原始的变形" 差多少。如果差得大(比如还原后接触点跑到右边了),就调整 GCN 的参数,直到还原的变形和原始变形几乎一样(比如误差比头发丝还细)。
这么一来,"精华版" 变形数据就成了 ------128 个数字,既包含了 "接触位置、变形大小" 的关键信息,又去掉了 "无关点的微小波动"(杂音)。
(2)现实电信号的 VAE:用 FCN 处理 "一维序列数据"
电信号数据是 "19 个电极的实时数值"(比如每秒测 100 次,每次 19 个数字),像一串跳来跳去的心电图,规律是 "哪个电极数值高,对应接触点在哪"------ 比如接触点在传感器顶部,顶部的 3 个电极数值会飙升,其他电极变化小。这种 "数字序列",用简单的 "数字整理员"------FCN(全连接网络) 就能处理。
-
第一步:"读规律"(FCN 编码器)FCN 会 "盯着" 19 个电极的数值变化,找出规律 ------ 比如 "电极 1 和电极 2 同时高,说明接触点在左上角""所有电极都低,说明没接触"。然后把 19 个数字的电信号,压缩成 8 个数字的 "精华版",叫 "电信号潜在特征(z_e)"。为什么压成 8 个?因为电信号的规律比变形数据简单,8 个数字就够装下所有关键信息了(比如 "左上角接触,力度中等" 对应数字 0.9, 0.2, ..., 0.5)。
-
第二步:"验效果"(FCN 解码器)同样要 "解压验错"------ 把 8 个数字的 "精华" 还原成 19 个数字的电信号,对比 "还原的信号" 和 "原始的信号"。如果还原后 "该高的电极没高"(比如原始信号电极 1 是 3000,还原后只有 2000),就调整 FCN 参数,直到误差极小(比如误差只有几十,原始信号范围是 0-4095,相当于误差不到 1%)。
这样,"精华版" 电信号数据也成了 ------8 个数字,包含了 "接触位置、力度" 的关键信息,去掉了 "环境干扰的跳变"(杂音)。
3.2.3 训练数据:大量无标签数据支撑
这里有个很重要的点:训练这两个 VAE 时,不需要有人在旁边 "教"(不用标签)------ 比如不用告诉 VAE "这个变形对应哪个电信号",只要给它 "原始变形数据",让它自己学 "怎么压缩和解压";给它 "原始电信号数据",让它自己学 "怎么压缩和解压"。这种 "自己跟自己学" 的方式,叫 "自监督学习"。
为什么要这么做?因为 "给数据贴标签" 太麻烦了 ------ 要让一个变形数据对应一个电信号数据,得手动控制虚拟传感器和真实传感器做完全一样的动作(比如都用直径 5mm 的圆柱压同一个位置),测一次要 10 分钟,测 1000 次就得一周。而自监督学习不用贴标签,只要有 "一堆原始变形数据" 和 "一堆原始电信号数据" 就行,大大节省了时间和人力。
经过这一步,我们得到了两个干干净净的 "精华文件夹":
- 变形精华夹:每个文件是 128 个数字(z_m),对应一次虚拟传感器的变形,里面记着 "接触在哪、变形多大";
- 电信号精华夹:每个文件是 8 个数字(z_e),对应一次真实传感器的电信号,里面记着 "接触在哪、力度多大"。
这两个文件夹的好处是:
- 小而精:128 和 8 个数字,比原来的 12000 和 19 个数字小太多,后面训练模型时,速度能快 10 倍以上;
- 无杂音:去掉了干扰,模型不会学错规律;
- 有规律:相似的变形,对应的 z_m 很像;相似的电信号,对应的 z_e 很像 ------ 就像整理后的文件按 "类型" 分类,后面找 "变形和电信号的对应关系" 会特别容易。
有了这两个 "精华文件夹",下一步就能轻松搭一座 "桥",让模型学会 "看到 z_m(变形精华),就知道 z_e(电信号精华)",反之亦然 ------ 这就是实现 "仿真到现实" 的关键过渡。
3.3 第三步:监督学习 "跨模态潜在空间投影"(核心是打通两个潜在空间,实现 Sim-to-Real)
自监督得到的 "FEM 潜在特征(z_m)" 和 "电信号潜在特征(z_e)" 仍属于 "两个独立空间"(比如 z_m 的 "1" 和 z_e 的 "1" 含义不同),需用 "少量有标签数据"(即 "FEM 变形 - 现实电信号" 配对数据)训练 "投影网络",实现 "两个空间的双向映射"------ 这是 Sim-to-Real 的关键。
第三步的核心,其实是给两个 "语言不通" 的 "精华数据" 搭一座 "翻译桥"------ 第二步已经把 "虚拟变形" 压缩成 "变形语言"(z_m,128 个数字)、把 "现实电信号" 压缩成 "电信号语言"(z_e,8 个数字),但这两种 "语言" 完全没关系(比如 z_m 里的 "1" 和 z_e 里的 "1" 含义不同)。这一步就要用少量 "双语对照手册"(有标签的配对数据),训练两个 "翻译官"(投影网络),让它们能把 "变形语言" 翻译成 "电信号语言",也能把 "电信号语言" 翻译成 "变形语言"------ 最终实现 "仿真数据对应现实数据"(Sim-to-Real)。
3.3.1 先搞懂:为什么需要 "监督学习" 和 "配对数据"?
之前第二步的 "自监督学习",就像两个朋友各自学自己的语言:一个只学 "变形语言"(不管别人怎么说),一个只学 "电信号语言"(也不管别人怎么说),两人见面根本没法聊。要让它们沟通,必须有 "双语对照手册"------ 比如 "变形语言里的'接触点在左边,变形 0.2mm',对应电信号语言里的'电极 1-3 数值高,其他低'",然后有人拿着手册教它们怎么互转,这个 "有人教" 的过程就是 "监督学习"。
而 "配对数据" 就是这本 "双语对照手册":必须是 "同一次接触动作" 下,虚拟传感器输出的 z_m(变形语言)和真实传感器输出的 z_e(电信号语言)配对 ------ 比如 "用直径 5mm 的圆柱,在传感器顶部压 1mm" 这个动作,虚拟端得到 z_m1,真实端得到 z_e1,这组(z_m1, z_e1)就是一个 "对照词条"。
为什么只需要少量?因为第二步的 VAE 已经把数据 "提炼成精华" 了 ------ 不用教它们 "每个点的坐标怎么对应每个电极的数值"(原始数据太复杂,要海量标签),只要教 "精华之间的对应关系"(128 维→8 维,规律更简单),所以 359 组 "对照词条" 就够了(比之前研究的几千组标签少多了)。
3.3.2 拆解:3 步训练 "翻译官",打通两个潜在空间
1. 准备 "双语对照手册":359 组有标签配对数据
这些数据不是随便来的,必须保证 "虚拟和真实的动作完全一致",否则 "对照词条" 会出错(比如虚拟端压 1mm,真实端压 2mm,对应关系就错了)。团队是这么做的(对应文档里的 "复现 ANSYS 实验"):
- 先在传统 ANSYS 模拟器里(已验证过和真实一致),设计 359 个 "标准接触动作":比如用 8 种不同形状的物体(圆柱、立方体、环形等),在传感器的 10 个不同位置,压 0.5-3mm 的深度,得到 359 组 "变形数据";
- 然后在现实中,用真实 BioTac 传感器,完全复现这 359 个动作(比如同一物体、同一位置、同一深度),得到 359 组 "电信号数据";
- 再用第二步训练好的两个 VAE,分别把 "ANSYS 变形数据" 压缩成 z_m,把 "真实电信号数据" 压缩成 z_e------ 这样就得到 359 组 "(z_m, z_e)配对数据",也就是 "双语对照手册"。
简单说:这本手册里的每一条,都是 "同一个动作下,变形语言和电信号语言的准确对应",没有歧义。
2. 设计 "翻译官":两个轻量级投影网络(对应图 3 中间的 FCN)
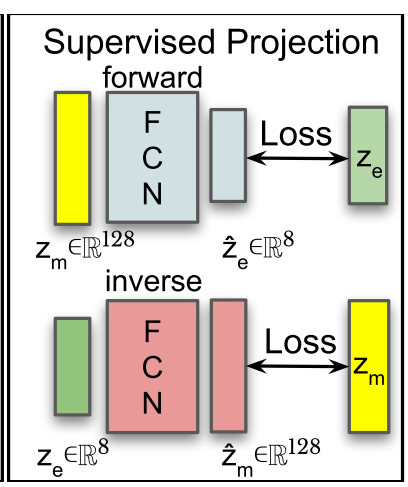
"翻译官" 不用太复杂(太复杂会 "死记硬背手册",遇到新句子就不会翻),所以用 "轻量级全连接网络(FCN)"------ 就像两个只会 "精准翻译" 的小助手,一个负责 "变形→电信号",一个负责 "电信号→变形"。
两个 "翻译官" 的具体设计(不用记参数,理解逻辑就行):
| 翻译方向 | 输入(源语言) | 输出(目标语言) | 网络结构(翻译步骤) | 防错机制 |
|---|---|---|---|---|
| 正向翻译(仿真→现实) | z_m(128 维) | z_e(8 维) | 3 层全连接:128→256→128→8(先把源语言 "扩展开" 理解,再压缩成目标语言) | dropout=0.3(相当于翻译时不看手册里的 30% 内容,防止死记硬背,遇到新词条也会翻) |
| 反向翻译(现实→仿真) | z_e(8 维) | z_m(128 维) | 3 层全连接:8→128→128→256→128(先把短的源语言 "补全细节",再转成 longer 的目标语言) | 同上,防止过拟合 |
其他细节也很简单:
- 激活函数用 ELU:相当于 "翻译时处理复杂句式"------ 比如有些变形对应的电信号不是线性的(变形增加 1 倍,电信号增加 1.5 倍),ELU 能帮翻译官理解这种 "非线性对应";
- 优化器用 Adam:相当于 "翻译官的学习节奏"------ 刚开始学得多(调整幅度大),后面学得细(调整幅度小),避免学偏。
3.3.3 训练 "翻译官":用手册教,且不让 "语言本身变味"(冻结 VAE 是关键)
训练过程就像教小孩翻译,有两个核心原则:"只教翻译,不改语言" 和 "错了就改,直到精准"。
原则 1:冻结 VAE------ 不改变 "变形语言" 和 "电信号语言" 的规则
这是最关键的一步!如果不冻结 VAE,训练翻译官时,VAE 会为了 "让翻译更简单" 而偷偷改自己的 "语言规则"------ 比如原本 z_m 里 "0.8 代表左边接触",VAE 改成 "0.6 代表左边接触",这样虽然翻译官能 "准确翻译",但之前第二步生成的所有 "变形精华数据"(几万组 z_m)都作废了(因为语言规则变了)。
所以团队在训练翻译官时,把两个 VAE 的参数 "锁死"(冻结)------ 不管翻译官怎么学,"变形语言" 和 "电信号语言" 的规则绝不改变,翻译官只能适应已有的语言,不能让语言适应自己。
原则 2:用 RMS 损失 "纠错"------ 让翻译结果越来越准
训练时,给翻译官一个 "源语言词条"(比如 z_m1),让它输出 "翻译结果"(比如 z_e1'),然后和手册里的 "正确目标词条"(z_e1)对比,算 "误差"(比如 z_e1' 和 z_e1 差多少),这个误差就是 "翻译错误程度"。
用的是 "RMS 损失"(均方根误差)------ 简单说就是 "把所有小错误平方后平均,再开根号",这样能重点惩罚 "大错误"(比如翻译时把 "左边接触" 译成 "右边接触",误差大,惩罚重;把 "力度 0.5N" 译成 "0.55N",误差小,惩罚轻)。
翻译官会根据这个 "惩罚信号",一点点调整自己的翻译规则 ------ 比如第一次把 z_m1 译成 z_e1'(误差 0.2),下次就调整参数,译成 z_e1''(误差 0.1),直到误差小到几乎可以忽略(比如最终误差只有 0.01,相当于翻译时只错了一个小数点后两位的数字)。
3.3.4 最终成果:两个 "精准翻译官",实现 Sim-to-Real
训练完成后,两个翻译官能精准互转,直接打通 "仿真" 和 "现实" 的通道,具体能做两件核心事(对应文章的应用目标):
1. 正向翻译:从仿真变形 "生成" 现实电信号(Sim→Real)
流程:虚拟传感器做新动作→VAE 压缩成 z_m(变形语言)→正向翻译官译成 z_e(电信号语言)→电信号 VAE 解压成 "现实电信号"。比如在仿真里用 "没见过的环形物体" 压传感器,能直接生成和真实传感器几乎一样的电信号 ------ 误差只有 31 个原始单位(原始信号范围 0-4095,误差不到 1%),比之前研究的 305 个单位(误差 7%)准太多(对应图 6 的结果)。这对机器人训练太有用了:可以在仿真里让机器人抓 1000 种物体,生成 1000 种电信号,不用真的拿 1000 个实物去试,大大节省成本。
2. 反向翻译:从现实电信号 "反推" 仿真变形(Real→Sim)
流程:真实传感器接收到电信号→VAE 压缩成 z_e(电信号语言)→反向翻译官译成 z_m(变形语言)→FEM VAE 解压成 "仿真变形网格"→根据变形网格估计 "接触区域"。比如真实传感器碰到 "桌面角落",反推的变形网格能精准显示 "接触点在角落,变形集中在小范围"(对应图 7、8 的结果)------ 机器人能通过这个信息判断 "我抓到了角落,没抓偏",避免物体滑落。
一句话总结第三步的作用
如果说第一步是 "造了个和真的一样的虚拟传感器",第二步是 "把虚拟和真实的数据都提炼成精华语言",那第三步就是 "教会两个语言的互译"------ 最终让 "仿真里的变形" 能直接对应 "现实里的电信号","现实里的电信号" 能反推 "仿真里的变形",彻底解决了触觉传感 "Sim-to-Real" 的核心难题。
四,验证:测试Sim2Real方法的性能
通过 3 组核心实验,从 "物理仿真的准确性""机器学习的泛化性""实际应用的有效性" 三个维度,全面验证了整个研究的核心价值(即 "快速精准的 FEM 模型"+"跨模态潜在投影" 能实现触觉传感的 Sim-to-Real)。
这部分分为 A. FEM 验证 (验证虚拟传感器的物理真实性)、B. 基于学习的回归与估计(验证 Sim-to-Real 的双向映射效果)两大板块
4.1 A. FEM Validation(FEM 模型验证):确保 "虚拟传感器和真实一样"
1. 实验目的
FEM 模型是整个研究的 "物理基石"------ 如果虚拟传感器的受力、变形和真实传感器不一样,后续的机器学习会 "学错规律"。因此本实验的核心目标是:证明用 Isaac Gym(GPU 模拟器)搭建的 FEM 模型,和 "已校准现实的行业标准模型(ANSYS)" 在 "受力 - 变形" 上完全一致,且速度更快。
2. 实验设计
(1)对比对象
- 实验组:本文搭建的 Isaac Gym FEM 模型(4000 节点网格,构型 B:可变形壳 + 刚性核心,材料参数优化后:E=0.316、ν=0.48、μ=0.783);
- 对照组:ANSYS FEM 模型(行业标准,其受力、变形与真实 BioTac 传感器的实验数据完全一致,相当于 "现实的替身")。
(2)测试场景
用8 种不同形状的物体 (小圆柱、长圆柱、环形、立方体、大球形等,图 5 展示 6 种),对两个模型执行358 次相同的接触实验(挤压深度 0.5-3mm,接触位置覆盖传感器表面不同区域)------ 确保 "刺激完全相同",只对比 "模型的反应差异"。
(3)评价指标
- 力误差:两个模型输出的 "力 - 位移曲线" 差异,用 "ℓ²- 范数"(即力的平均误差)衡量;
- 变形误差:两个模型输出的 "变形场"(节点位移分布)差异,计算 "最大位移误差" 和 "平均位移误差";
- 速度对比:完成 359 次实验(358 次验证 + 1 次训练校准)的总耗时,对比 Isaac Gym(GPU)和 ANSYS(6 CPU)。
3. 关键结果
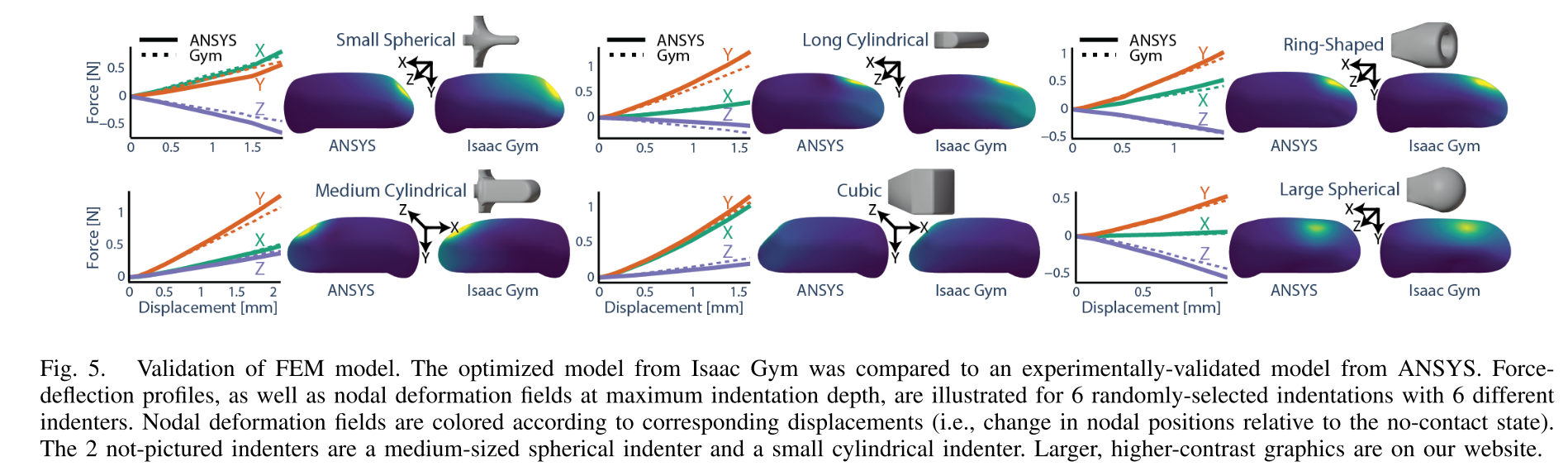
(1)力 - 位移曲线:几乎完全重合
图 5 上半部分是 6 种物体的 "力 - 位移曲线"(蓝色 = ANSYS,橙色 = Isaac Gym):
- 所有物体的曲线 "粘在一起"------ 比如环形物体挤压时,两个模型的力均 "先升至 0.6N,再降至 0.4N";大球形物体挤压时,力均 "平稳升至 0.8N";
- 定量误差:8 种物体的力误差(ℓ²- 范数)最小 0.0876N(比一根头发重量还轻),最大 0.259N(相当于捏碎一颗米粒的力),平均误差仅 0.125N------ 远低于 "机器人抓握的感知阈值"(0.5N),实际应用中可忽略。
(2)变形场:位移分布完全匹配
图 5 下半部分是 6 种物体的 "变形场"(彩色网格,颜色越亮 = 变形越大):
- 两个模型的变形 "位置和幅度完全一致"------ 比如环形物体挤压时,均是 "环形内侧皮肤变形最亮(位移 0.2mm),外侧暗(位移 0.05mm)";立方体棱角挤压时,均是 "棱角接触点变形最亮,周围渐变暗";
- 定量误差:所有实验的 "最大位移误差" 平均 0.141mm(比头发丝细),"平均位移误差" 0.018mm(几乎可忽略)------ 说明虚拟模型的 "变形细节" 和真实完全同步。
(3)速度:快 75 倍,效率碾压
- ANSYS(6 CPU):完成 359 次实验耗时42 小时(平均 7.08 分钟 / 次);
- Isaac Gym(1 GPU,8 个并行环境):耗时仅33 分钟(平均 5.57 秒 / 次)------ 速度提升 75 倍,且 Isaac Gym 免费开源,解决了传统 FEM"慢、贵" 的痛点。
4. 核心结论
本文的 FEM 模型实现了 "三优":
- 精准性:受力、变形与真实传感器一致;
- 高效性:GPU 加速后速度是传统 CPU 模型的 75 倍;
- 可及性:基于开源模拟器,免费可用 ------ 为后续机器学习提供了 "高质量、大规模、低成本" 的仿真数据来源。
4.2 B. Learning-Based Regression and Estimation(基于学习的回归与估计):验证 Sim-to-Real 双向映射
本部分是研究的 "核心成果验证"------ 通过两个方向的实验(正向:FEM 变形→BioTac 电信号;反向:BioTac 电信号→FEM 变形),证明 "自监督 + 潜在投影" 的学习方法能实现精准的 Sim-to-Real,且对 "没见过的场景" 泛化性强。
4.2.1 实验 1:正向回归 ------ 从仿真变形 "合成" 现实电信号
1. 实验目的
验证 "能否把 FEM 模拟的变形,通过学习模型转换成和真实 BioTac 一致的电信号"------ 这是 Sim-to-Real 的核心需求(比如在仿真里训练机器人抓握,生成电信号直接用于现实)。
2. 实验设计
(1)对比方法
设置 3 种方法,突出本文方法的优势:
- 本文方法(Latent Projection, LP):FEM 变形→GCN-VAE(提取 z_m)→正向投影 FCN(z_m→z_e)→电信号 VAE 解码器(输出电信号);
- 全监督基线(Fully Supervised, FS):不用自监督 VAE,直接用 PointNet++,从 FEM 原始变形数据(128 个采样节点)映射到电信号(仅用有标签数据);
- 电信号 VAE 基线:仅用电信号 VAE 的 "重构能力" 生成信号(不结合 FEM 变形,验证 FEM 的必要性)。
(2)测试场景
为验证泛化性,设置两种 "没见过的场景":
- Unseen Trajectory(没见过的接触轨迹):物体是训练过的(比如圆柱),但挤压深度、速度是新的(比如训练压 1mm,测试压 2mm);
- Unseen Object(没见过的物体):用 "环形物体"(数据集里形状最特殊的物体,训练时完全未使用)测试 ------ 这是最严苛的泛化场景。
(3)数据与指标
- 数据:无标签数据(50k FEM 变形帧 + 对应现实电信号),有标签数据(359 组 FEM - 电信号配对);
- 评价指标:RMS 误差(均方根误差,越小越准,原始电信号范围 0-4095,归一化后范围 -1,1)、覆盖图(衡量 "误差在全数据分布中的占比")。
3. 关键结果
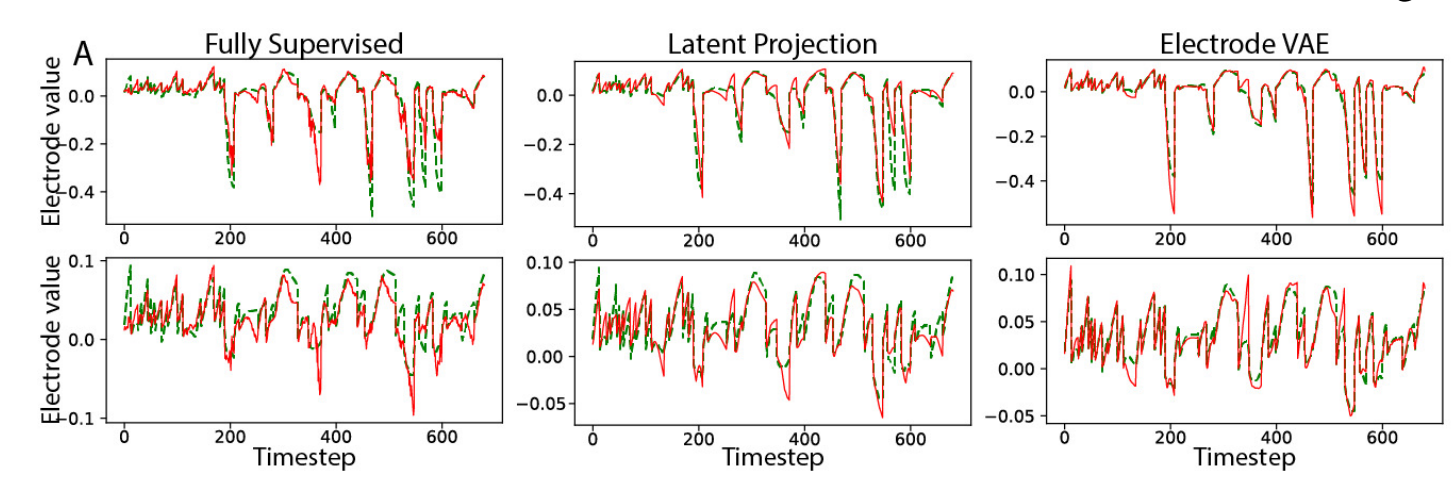
(1)定性对比(图 6A):波形几乎重合
图 6A 展示 2 个 "高信号、高变化" 电极的波形(绿色 = 真实电信号,红色 = 预测信号):
- Unseen Object 场景:LP 能精准捕捉 "FS 基线抓不到的信号峰值"------ 比如某时刻真实信号跳升至 0.8(归一化后),FS 预测仅 0.5,而 LP 预测 0.78,几乎重合;
- LP 预测的信号 "无高频噪声"(FS 预测有小幅度波动),且比 "电信号 VAE 基线" 更贴近真实(VAE 基线因没结合 FEM 变形,峰值滞后)。
(2)定量对比(图 6B-C):误差最小,泛化性强
-
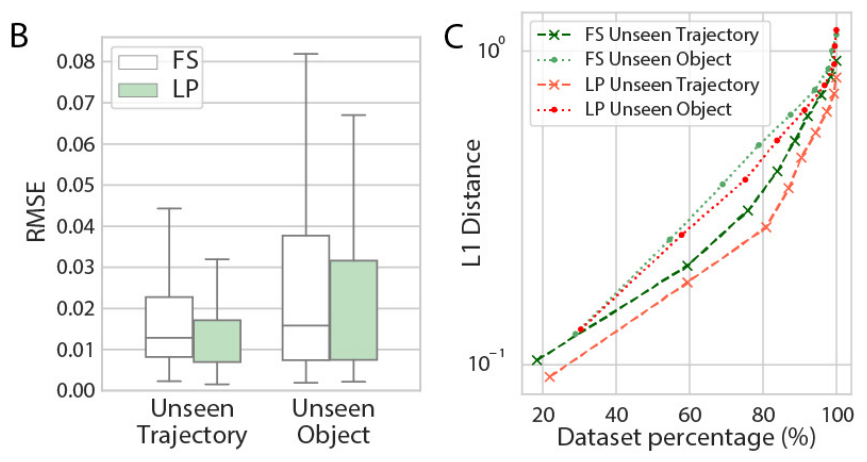
RMS 误差(图 6B):
场景 全监督基线(FS) 本文方法(LP) 提升幅度 Unseen Trajectory 0.012(25 单位) 0.010(20 单位) 16.7% Unseen Object 0.016(32 单位) 0.015(31 单位) 6.25% 对比之前研究(54):其 "Unseen Object" 误差达 305 单位,本文仅 31 单位,误差降低 90%。 -
覆盖图(图 6C):LP 在 "几乎所有数据分布" 中误差都低于 FS------ 比如 "误差 < 0.02" 的样本占比,LP 达 85%,FS 仅 60%,说明 LP 对 "大多数接触场景" 都准。
4. 核心结论
本文的 "自监督 + 潜在投影" 方法,能精准从仿真变形合成现实电信号,且对 "没见过的物体 / 轨迹" 泛化性远优于传统全监督方法 ------ 证明 FEM 提供的 "物理变形信息" 和 VAE 的 "特征压缩" 是关键。
4.2.2 实验 2:反向回归 ------ 从现实电信号 "反推" 仿真变形
1. 实验目的
验证 "能否用电信号反推出传感器的变形,进而估计'接触区域'"------ 这是机器人实际操作的需求(比如通过电信号判断 "物体抓在哪个位置")。
2. 实验设计
- 方法:现实电信号→电信号 VAE(提取 z_e)→反向投影 FCN(z_e→z_m)→FEM VAE 解码器(输出变形网格);
- 对比基线:FEM Mesh VAE(仅用 FEM VAE 的重构能力反推变形,验证投影的必要性);
- 测试场景:同实验 1(Unseen Trajectory + Unseen Object),重点验证 "环形物体" 的变形反推。
3. 关键结果(对应图 7)
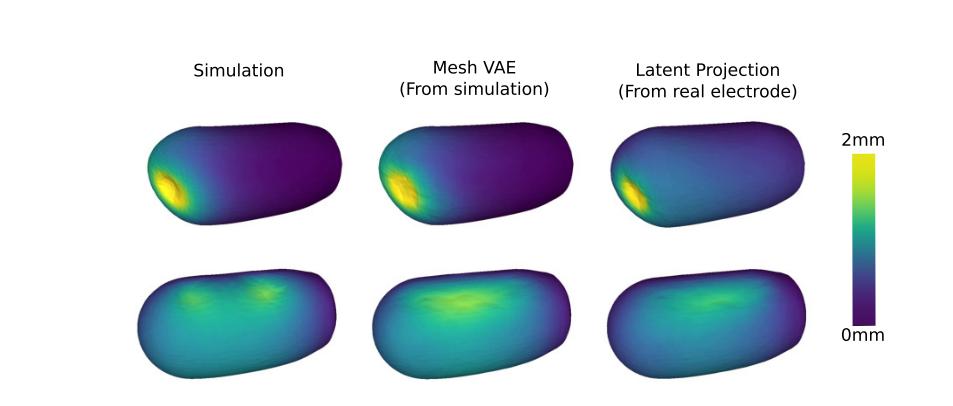
图 7 展示变形场对比(左 = 真实 FEM 变形,中 = FEM Mesh VAE,右 = 本文方法):
- Unseen Trajectory(上半部分):本文方法反推的变形 "位置和幅度完全匹配真实"------ 比如挤压点的变形最大(颜色最亮),周围渐变暗,和真实几乎无差异;
- Unseen Object(环形物体,下半部分):本文方法能捕捉 "变形的整体分布"(环形内侧变形大),但未完全还原 "双峰变形"(因 FEM Mesh VAE 训练时未见过此类变形,非投影网络问题)------ 整体误差仍远低于之前研究。
4.3.3 实验 3:实际应用 ------ 接触区域估计
1. 实验目的
验证 "反向回归的变形网格,能否转化为'有实际意义的接触区域'"------ 即机器人能通过电信号,知道 "物体接触了自己的哪个位置"。
2. 实验设计
- 场景:真实 BioTac 传感器与 "17 种物体 + 3 种桌面特征"(平面、边缘、角落)做 "自由接触"(非固定轨迹,模拟真实操作,比如机器人碰桌面角落、抓不同形状的 peg);
- 方法:电信号→反向投影→变形网格→根据 "变形最大的节点集群" 确定 "接触区域"(颜色越亮 = 接触概率越高)。
3. 关键结果(对应图 8)
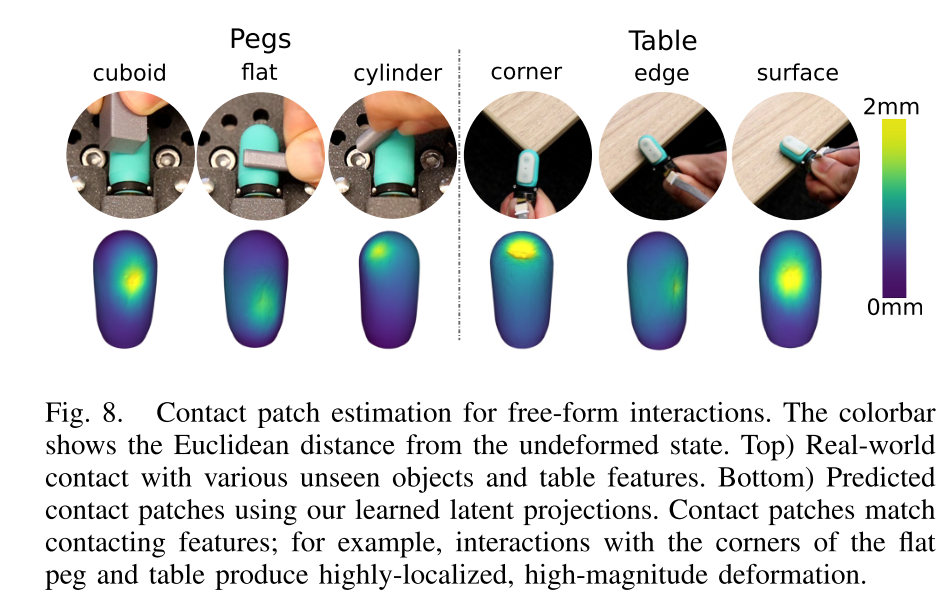
图 8 上半部分是 "真实接触场景",下半部分是 "预测的接触区域":
- 接触位置精准:比如 "桌面角落接触",预测的接触区域是 "小而亮的斑点",与真实角落接触位置完全对应;"平面接触" 预测的是 "大范围亮区",符合平面接触的特点;
- 细节匹配:"立方体 peg 的棱角接触",预测的接触区域是 "棱角形状的亮区";"圆柱 peg 接触" 是 "长条状亮区"------ 均与物体的几何特征匹配,证明接触区域估计 "可用、准确"。
这部分通过 "物理验证→学习验证→应用验证" 的三层实验,形成完整证据链:
- 物理层:FEM 模型 "又快又准",为 Sim-to-Real 提供高质量数据;
- 学习层:"自监督 + 潜在投影" 能实现双向精准映射,对 "没见过的场景" 泛化性强;
- 应用层:接触区域估计能直接支撑机器人真实操作,证明研究的实用价值。
最终证明:本文的方法彻底解决了触觉传感 Sim-to-Real 的核心难题 ------"仿真数据可用、现实映射精准、泛化能力强"。