将3D资产分割为其组成部分对于增强三维理解、促进模型复用以及支持部件生成等应用至关重要。然而,现有方法在处理复杂物体时存在鲁棒性不足等问题,且无法实现全自动化流程。本文提出了一种原生3D点提示部件分割模型P3-SAM,旨在实现任意三维物体的全自动组件分割。受SAM启发,P3-SAM由特征提取器、多重分割头和IoU预测器组成,支持用户交互式分割。我们还提出了一种算法来自动筛选并合并模型预测的掩膜,实现部件实例分割。该模型在我们新建的包含370万个带合理分割标签模型的数据集上进行训练。对比实验表明,本方法能在任意复杂物体上实现精确分割结果和强大鲁棒性,达到了当前最优性能。

方法
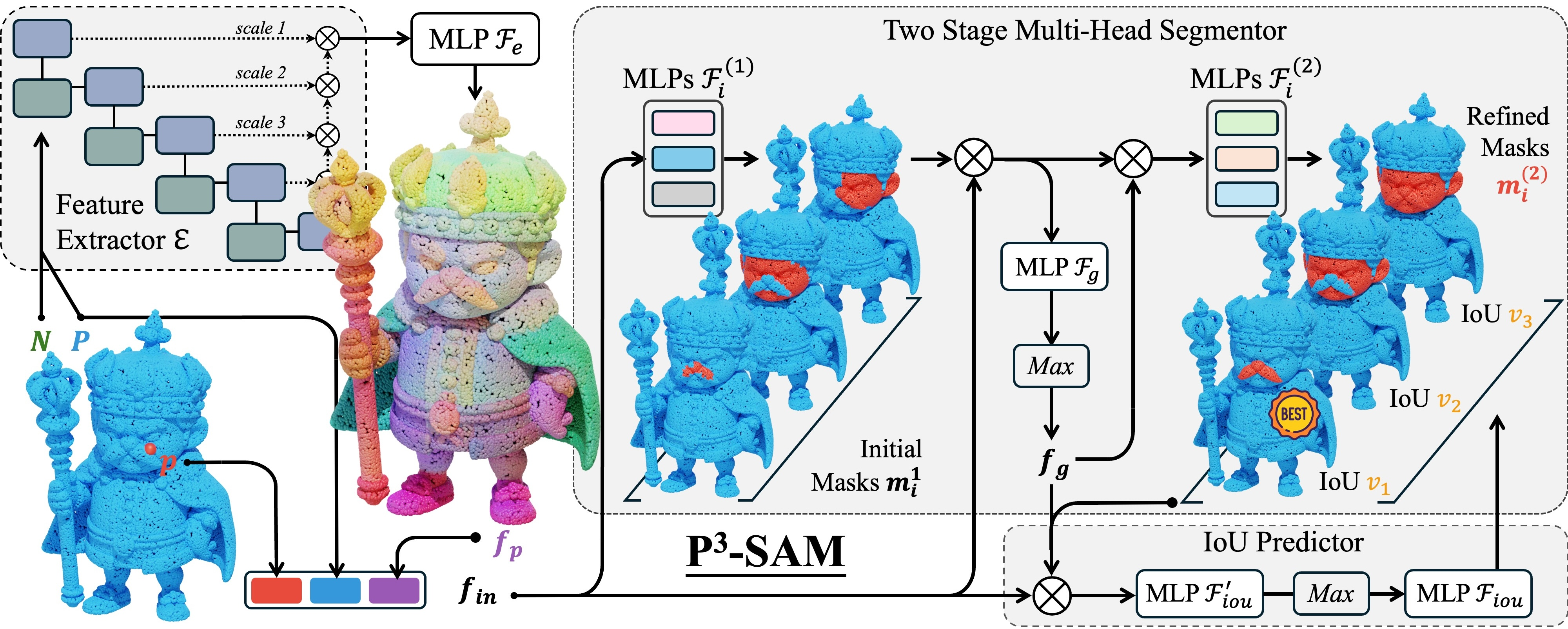
P3-SAM的网络架构:输入点云被送入特征提取器以获取逐点特征。这些特征、点提示以及原始点云随后被输入到一个两阶段多掩模分割器中,生成不同尺度的三个掩模。最后,利用IoU预测器评估掩模质量,并选择最佳掩模作为最终预测结果。
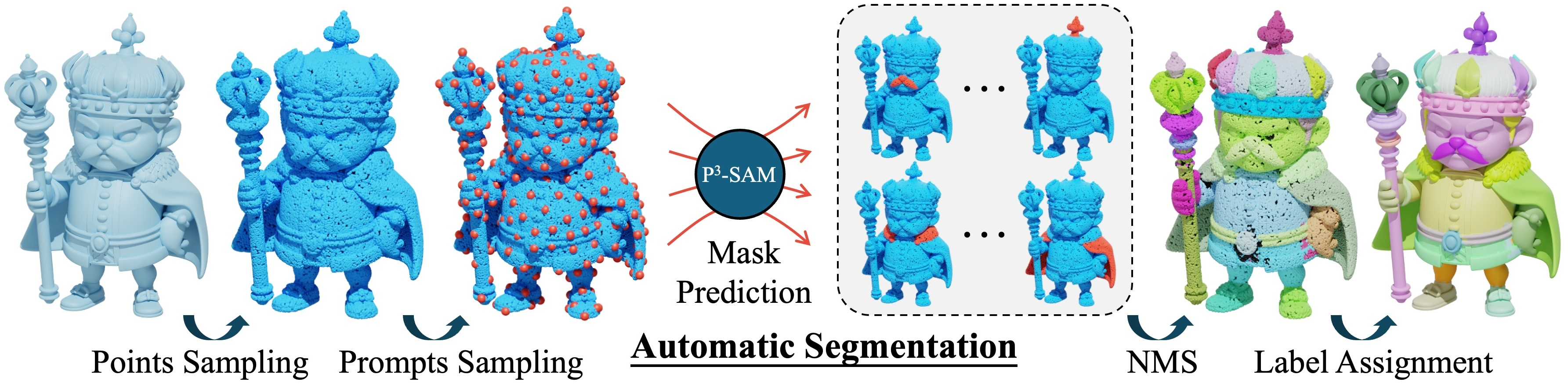
自动分割流程:通过FPS采样点提示,输入P3-SAM模型获取多个掩码,随后采用非极大值抑制(NMS)合并冗余掩码。最后将点级掩码投影到网格面上,得到部件分割结果。