背景意义
研究背景与意义
随着医疗技术的迅速发展,医疗设备的智能化和自动化程度不断提高,尤其是在图像处理和分析领域。医疗设备显示器作为医疗工作中不可或缺的一部分,其图像的准确识别与分割对于提高医疗服务质量、保障患者安全具有重要意义。传统的图像处理方法在复杂环境下往往难以实现高效、准确的目标检测和分割,因此,基于深度学习的图像分割技术逐渐成为研究的热点。
YOLO(You Only Look Once)系列模型因其优越的实时性和准确性,广泛应用于目标检测任务。YOLOv8作为该系列的最新版本,结合了更为先进的网络结构和优化算法,能够在保持高精度的同时,显著提高处理速度。然而,针对医疗设备显示器的图像分割任务,现有的YOLOv8模型仍存在一定的局限性,尤其是在复杂背景下的目标识别和分割精度方面。因此,改进YOLOv8模型以适应医疗设备显示器图像分割的需求,具有重要的研究价值和实际意义。
本研究将基于"cloudphy-monitors"数据集进行模型的改进与优化。该数据集包含6400张图像,涵盖了气瓶、血氧仪和呼吸机三类医疗设备,具有较高的代表性和多样性。通过对该数据集的深入分析,我们可以更好地理解不同医疗设备在显示器图像中的特征及其分布规律,为模型的改进提供有力的依据。此外,数据集中多样化的背景和光照条件将为模型的鲁棒性提升提供挑战与机遇。
在研究过程中,我们将采用数据增强、特征提取优化、损失函数改进等多种手段,提升YOLOv8在医疗设备显示器图像分割任务中的表现。通过对比实验,验证改进后的模型在分割精度、处理速度等方面的优势,从而为实际应用提供理论支持和技术保障。研究结果不仅可以为医疗设备的智能化管理提供技术支持,还能够为相关领域的研究提供参考。
综上所述,基于改进YOLOv8的医疗设备显示器图像分割系统的研究,不仅具有重要的学术价值,也对提升医疗服务质量、推动医疗设备智能化发展具有深远的现实意义。通过本研究的开展,我们期望能够为医疗行业提供更为高效、准确的图像处理解决方案,助力医疗技术的进一步创新与发展。
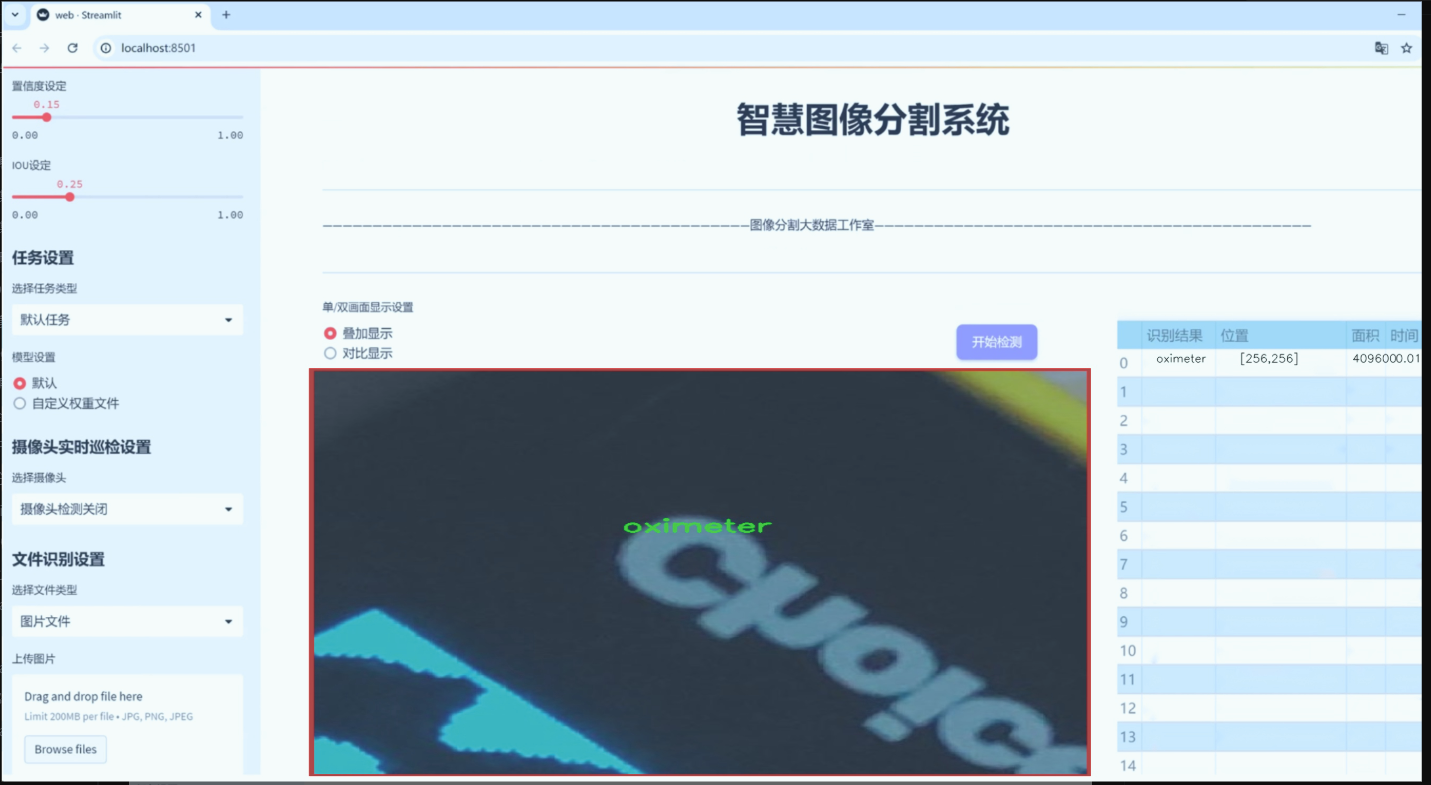
图片效果


数据集信息
数据集信息展示
在本研究中,我们使用了名为"cloudphy-monitors"的数据集,以训练和改进YOLOv8-seg模型,旨在提升医疗设备显示器图像的分割系统性能。该数据集专注于医疗环境中的关键设备,包含三种主要类别:气体瓶(gas cylinder)、血氧仪(oximeter)和呼吸机(ventilator)。这些设备在现代医疗中扮演着至关重要的角色,因此准确的图像分割不仅有助于设备的自动识别,还能在医疗监控和设备管理中发挥重要作用。
"cloudphy-monitors"数据集的构建经过精心设计,确保了数据的多样性和代表性。每个类别的图像均来源于真实的医疗环境,涵盖了不同的拍摄角度、光照条件和背景设置。这种多样性使得模型在训练过程中能够学习到更为丰富的特征,从而在实际应用中提高其鲁棒性和准确性。数据集中包含的气体瓶图像展示了不同类型和尺寸的气体瓶,这对于医疗机构在气体管理和监控中至关重要。血氧仪的图像则展示了各种型号和显示状态,确保模型能够识别不同品牌和样式的设备。呼吸机的图像则涵盖了不同的操作模式和状态,帮助模型学习如何在不同的工作条件下进行有效的分割。
在数据预处理阶段,我们对数据集进行了标准化处理,包括图像的尺寸调整、颜色归一化和数据增强等。这些步骤不仅提高了模型的训练效率,还增强了模型的泛化能力。通过对图像进行旋转、翻转、缩放等操作,我们能够生成更多的训练样本,从而有效减少过拟合的风险。此外,数据集中每个类别的样本数量也经过合理分配,确保模型在训练过程中不会偏向某一特定类别,从而提高整体的识别精度。
为了评估模型的性能,我们将数据集划分为训练集、验证集和测试集。训练集用于模型的学习,验证集用于调整模型参数,而测试集则用于最终的性能评估。通过这种方式,我们能够全面了解模型在不同数据集上的表现,确保其在实际应用中的可靠性和有效性。
总之,"cloudphy-monitors"数据集为改进YOLOv8-seg的医疗设备显示器图像分割系统提供了坚实的基础。通过精心设计的数据集,我们能够训练出更为精准和高效的模型,为医疗设备的自动识别和管理提供强有力的支持。这不仅有助于提升医疗服务的质量,也为未来的智能医疗设备发展奠定了基础。随着技术的不断进步,我们期待在医疗图像处理领域取得更大的突破,为患者提供更好的医疗体验。





核心代码
以下是经过简化并添加详细中文注释的核心代码部分:
import platform
from pathlib import Path
import cv2
import numpy as np
import torch
from ultralytics.cfg import get_cfg, get_save_dir
from ultralytics.data import load_inference_source
from ultralytics.nn.autobackend import AutoBackend
from ultralytics.utils import LOGGER, select_device, smart_inference_mode
class BasePredictor:
"""
BasePredictor类用于创建预测器的基类。
"""
def __init__(self, cfg='DEFAULT_CFG', overrides=None):
"""
初始化BasePredictor类。
参数:
cfg (str, optional): 配置文件路径,默认为'DEFAULT_CFG'。
overrides (dict, optional): 配置覆盖,默认为None。
"""
self.args = get_cfg(cfg, overrides) # 获取配置
self.save_dir = get_save_dir(self.args) # 获取保存结果的目录
self.model = None # 模型初始化为None
self.device = None # 设备初始化为None
def preprocess(self, im):
"""
在推理之前准备输入图像。
参数:
im (torch.Tensor | List(np.ndarray)): 输入图像,支持Tensor或Numpy数组列表。
返回:
torch.Tensor: 处理后的图像张量。
"""
if not isinstance(im, torch.Tensor):
im = np.stack(im) # 将图像堆叠为一个数组
im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR转RGB,形状调整为(B, C, H, W)
im = torch.from_numpy(im) # 转换为Tensor
im = im.to(self.device) # 移动到指定设备
return im.float() / 255 # 归一化到[0, 1]
def inference(self, im):
"""
对给定图像进行推理。
参数:
im (torch.Tensor): 输入图像张量。
返回:
预测结果。
"""
return self.model(im) # 使用模型进行推理
@smart_inference_mode()
def stream_inference(self, source=None):
"""
实时推理并保存结果。
参数:
source: 输入源,可以是视频流或图像文件。
"""
self.setup_source(source) # 设置输入源
for batch in self.dataset: # 遍历数据集
im0s = batch[1] # 获取原始图像
im = self.preprocess(im0s) # 预处理图像
preds = self.inference(im) # 进行推理
# 处理和保存结果的逻辑可以在这里添加
def setup_source(self, source):
"""
设置输入源和推理模式。
参数:
source: 输入源。
"""
self.dataset = load_inference_source(source) # 加载输入源
def setup_model(self, model):
"""
初始化YOLO模型并设置为评估模式。
参数:
model: 模型参数。
"""
self.model = AutoBackend(model) # 使用AutoBackend加载模型
self.device = self.model.device # 更新设备
self.model.eval() # 设置模型为评估模式代码注释说明:
类和方法定义:每个类和方法都有简要说明,描述其功能和参数。
参数和返回值:对每个方法的参数和返回值进行了详细描述,帮助理解其作用。
处理逻辑:关键的处理逻辑,如图像预处理、推理等,均有注释说明其步骤和目的。
这段代码展示了YOLO模型推理的基本框架,包括模型初始化、输入源设置、图像预处理和推理过程。
这个程序文件是Ultralytics YOLO模型的预测器实现,主要用于在图像、视频、目录、流媒体等多种数据源上进行目标检测。文件中包含了类BasePredictor,它是创建预测器的基础类,封装了模型的加载、数据预处理、推理、后处理和结果保存等功能。
在文件开头,提供了使用该预测器的示例,包括支持的输入源(如摄像头、图片、视频、YouTube链接等)和模型格式(如PyTorch、ONNX、TensorRT等)。接着,导入了一些必要的库和模块,包括cv2(OpenCV)、numpy、torch等。
BasePredictor类的构造函数初始化了一些重要的属性,如配置参数、保存结果的目录、模型、数据集等。它还提供了图像预处理的方法,包括将输入图像转换为适合模型的格式。推理过程通过inference方法实现,该方法使用模型对预处理后的图像进行预测。
文件中还定义了结果写入和后处理的方法,write_results方法负责将推理结果保存到文件或目录中,并在图像上绘制检测框。postprocess方法则用于对预测结果进行后处理。
__call__方法使得该类的实例可以被调用,执行推理操作。stream_inference方法则实现了实时推理的功能,适用于摄像头或视频流。它在每个批次中执行预处理、推理和后处理,并在需要时保存结果。
此外,setup_model方法用于初始化YOLO模型并设置为评估模式,show方法用于使用OpenCV显示图像,save_preds方法则用于将视频预测结果保存为文件。
整个类还支持回调机制,可以在特定事件发生时执行注册的回调函数,增强了代码的灵活性和可扩展性。
总的来说,这个文件实现了YOLO模型的预测功能,提供了多种输入源和输出选项,适用于各种计算机视觉任务。
12.系统整体结构(节选)
整体功能和构架概括
Ultralytics YOLO项目是一个开源的计算机视觉框架,主要用于目标检测和图像分类任务。该项目采用模块化设计,便于扩展和维护。其核心功能包括模型的训练、推理和评估,支持多种输入源和输出格式。通过不同的模块,用户可以方便地构建、训练和部署YOLO模型,满足不同的应用需求。
项目的主要结构如下:
模型定义与训练:包括YOLO、NAS等模型的定义和训练过程。
预测与推理:提供实时推理和结果处理的功能,支持多种输入格式。
辅助模块:实现了一些额外的神经网络层和模块,增强了模型的灵活性和性能。
文件功能整理表
文件路径 功能描述
ultralytics/nn/extra_modules/orepa.py 实现了OREPA神经网络模块,支持卷积层的灵活配置和多种操作。
ultralytics/models/yolo/classify/train.py 负责图像分类模型的训练,包括数据集构建、模型初始化和训练过程管理。
ultralytics/models/nas/init .py 初始化NAS模块,导入核心类(如NAS、NASPredictor、NASValidator)。
ultralytics/models/init .py 初始化模型模块,导入YOLO、RTDETR和SAM等主要模型。
ultralytics/engine/predictor.py 实现目标检测的预测器,支持多种输入源的推理和结果处理。
这个表格总结了每个文件的主要功能,帮助用户快速理解Ultralytics YOLO项目的结构和各个模块的作用。
13.图片、视频、摄像头图像分割Demo(去除WebUI)代码
在这个博客小节中,我们将讨论如何在不使用WebUI的情况下,实现图像分割模型的使用。本项目代码已经优化整合,方便用户将分割功能嵌入自己的项目中。 核心功能包括图片、视频、摄像头图像的分割,ROI区域的轮廓提取、类别分类、周长计算、面积计算、圆度计算以及颜色提取等。 这些功能提供了良好的二次开发基础。
核心代码解读
以下是主要代码片段,我们会为每一块代码进行详细的批注解释:
import random
import cv2
import numpy as np
from PIL import ImageFont, ImageDraw, Image
from hashlib import md5
from model import Web_Detector
from chinese_name_list import Label_list
根据名称生成颜色
def generate_color_based_on_name(name):
...
计算多边形面积
def calculate_polygon_area(points):
return cv2.contourArea(points.astype(np.float32))
...
绘制中文标签
def draw_with_chinese(image, text, position, font_size=20, color=(255, 0, 0)):
image_pil = Image.fromarray(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(image_pil)
font = ImageFont.truetype("simsun.ttc", font_size, encoding="unic")
draw.text(position, text, font=font, fill=color)
return cv2.cvtColor(np.array(image_pil), cv2.COLOR_RGB2BGR)
动态调整参数
def adjust_parameter(image_size, base_size=1000):
max_size = max(image_size)
return max_size / base_size
绘制检测结果
def draw_detections(image, info, alpha=0.2):
name, bbox, conf, cls_id, mask = info'class_name', info'bbox', info'score', info'class_id', info'mask'
adjust_param = adjust_parameter(image.shape:2)
spacing = int(20 * adjust_param)
if mask is None:
x1, y1, x2, y2 = bbox
aim_frame_area = (x2 - x1) * (y2 - y1)
cv2.rectangle(image, (x1, y1), (x2, y2), color=(0, 0, 255), thickness=int(3 * adjust_param))
image = draw_with_chinese(image, name, (x1, y1 - int(30 * adjust_param)), font_size=int(35 * adjust_param))
y_offset = int(50 * adjust_param) # 类别名称上方绘制,其下方留出空间
else:
mask_points = np.concatenate(mask)
aim_frame_area = calculate_polygon_area(mask_points)
mask_color = generate_color_based_on_name(name)
try:
overlay = image.copy()
cv2.fillPoly(overlay, [mask_points.astype(np.int32)], mask_color)
image = cv2.addWeighted(overlay, 0.3, image, 0.7, 0)
cv2.drawContours(image, [mask_points.astype(np.int32)], -1, (0, 0, 255), thickness=int(8 * adjust_param))
# 计算面积、周长、圆度
area = cv2.contourArea(mask_points.astype(np.int32))
perimeter = cv2.arcLength(mask_points.astype(np.int32), True)
......
# 计算色彩
mask = np.zeros(image.shape[:2], dtype=np.uint8)
cv2.drawContours(mask, [mask_points.astype(np.int32)], -1, 255, -1)
color_points = cv2.findNonZero(mask)
......
# 绘制类别名称
x, y = np.min(mask_points, axis=0).astype(int)
image = draw_with_chinese(image, name, (x, y - int(30 * adjust_param)), font_size=int(35 * adjust_param))
y_offset = int(50 * adjust_param)
# 绘制面积、周长、圆度和色彩值
metrics = [("Area", area), ("Perimeter", perimeter), ("Circularity", circularity), ("Color", color_str)]
for idx, (metric_name, metric_value) in enumerate(metrics):
......
return image, aim_frame_area处理每帧图像
def process_frame(model, image):
pre_img = model.preprocess(image)
pred = model.predict(pre_img)
det = pred0 if det is not None and len(det)
if det:
det_info = model.postprocess(pred)
for info in det_info:
image, _ = draw_detections(image, info)
return image
if name == "main ":
cls_name = Label_list
model = Web_Detector()
model.load_model("./weights/yolov8s-seg.pt")
# 摄像头实时处理
cap = cv2.VideoCapture(0)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
......
# 图片处理
image_path = './icon/OIP.jpg'
image = cv2.imread(image_path)
if image is not None:
processed_image = process_frame(model, image)
......
# 视频处理
video_path = '' # 输入视频的路径
cap = cv2.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
......源码文件

源码获取
欢迎大家点赞、收藏、关注、评论 啦 、查看👇🏻获取联系方式👇🏻