目录
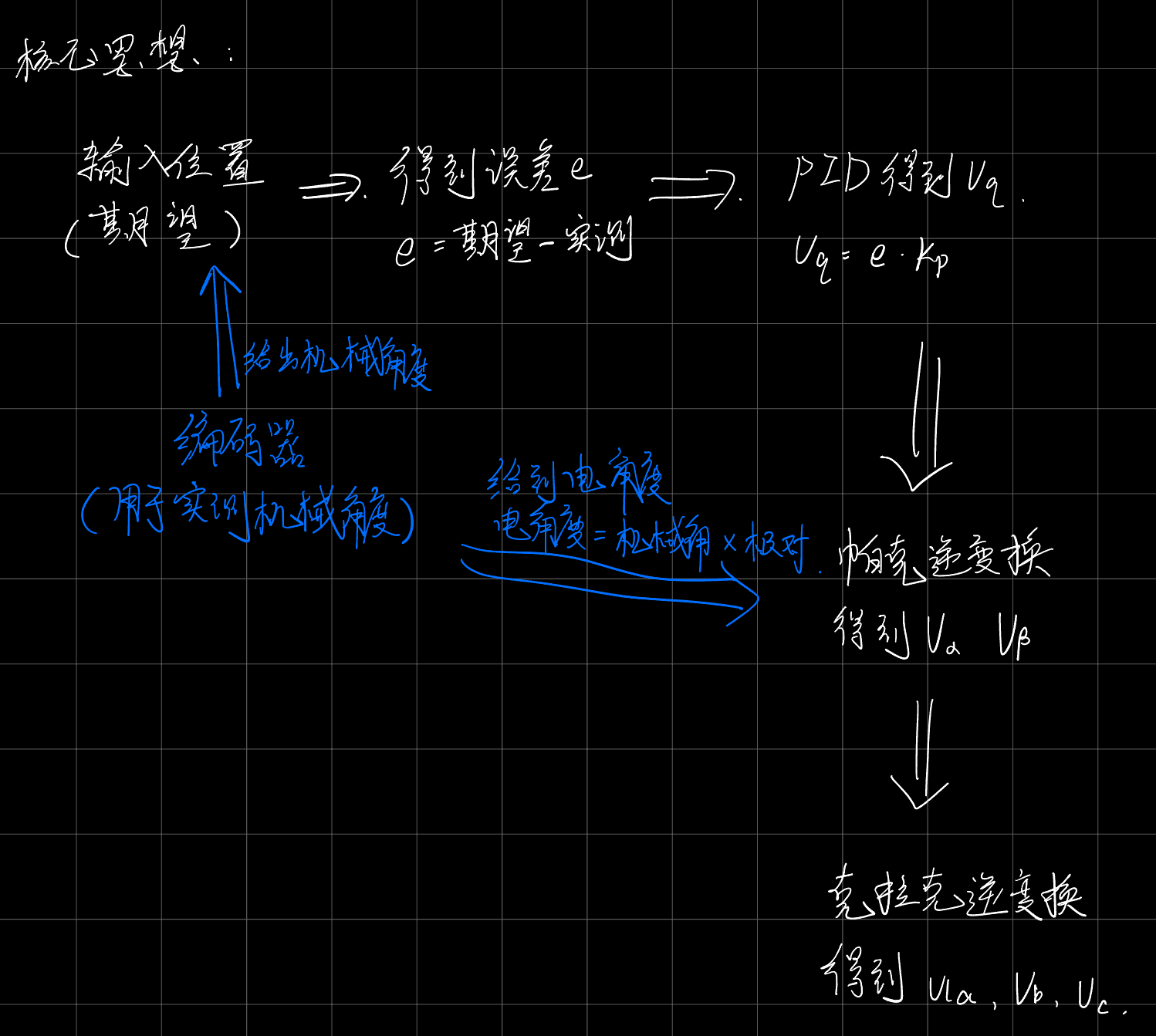
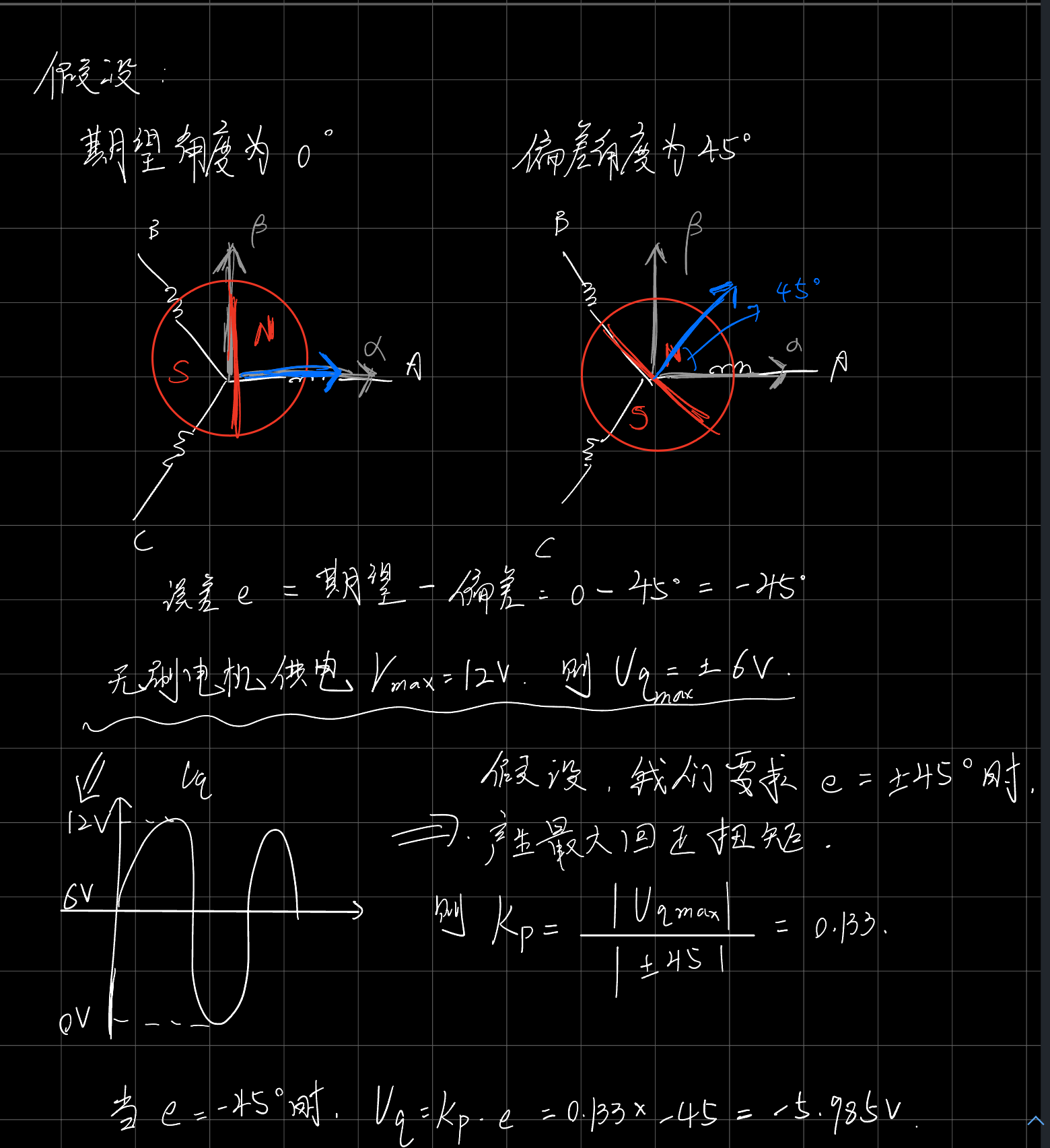
一、理论部分
二、伪代码
cppfloat Kp=0.133; //限制 #define _constrain(amt,low,high) ((amt)<(low)?(low):((amt)>(high)?(high):(amt))) // 归一化角度到 [0,2PI] float _normalizeAngle(float angle){ float a = fmod(angle, 2*PI); //取余运算可以用于归一化,列出特殊值例子算便知 return a >= 0 ? a : (a + 2*PI); } //根据输入Uq、Ud、角度,获取三相PWM; void setPhaseVoltage(float Uq,float Ud, float angle_el) { angle_el = _normalizeAngle(angle_el); // 帕克逆变换 Ualpha = -Uq*sin(angle_el); Ubeta = Uq*cos(angle_el); // 克拉克逆变换 Ua = Ualpha + voltage_power_supply/2; Ub = (sqrt(3)*Ubeta-Ualpha)/2 + voltage_power_supply/2; Uc = (-Ualpha-sqrt(3)*Ubeta)/2 + voltage_power_supply/2; setPwm(Ua,Ub,Uc); } //电角度计算 //zero_electric_angle为电角度偏差 //PP 为 极对数 float _electricalAngle(){ return _normalizeAngle((float)(DIR * PP) * getAngle_Without_track()-zero_electric_angle); } //Uq值=Kp*偏差e*DIR(正负方向) setPhaseVoltage(_constrain(Kp*(motor_target-DIR*Sensor_Angle)*180/PI,-6,6),0,_electricalAngle());