通过PWM输出控制舵机不同角度的转动,这是PWM经典的应用场景,本章就用代码展开讲讲。
这个项目需要用一个要求20ms的舵机,接下来就从最开始的代码看起。
头文件写法还是和以前一样,不过这一次还要加入舵机的应用函数。
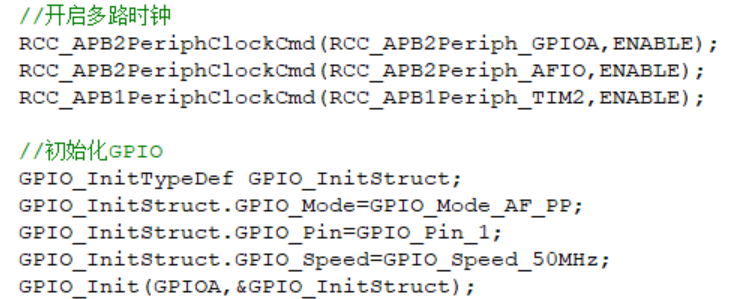
源文件部分,还是先开启需要用到的时钟,这里要用到PA1引脚,因此开启GPIOA时钟,由于之后要用到复用输出模式,所以还要开启AFIO时钟。
而GPIO初始化模块的代码还是和之前写过的一样。
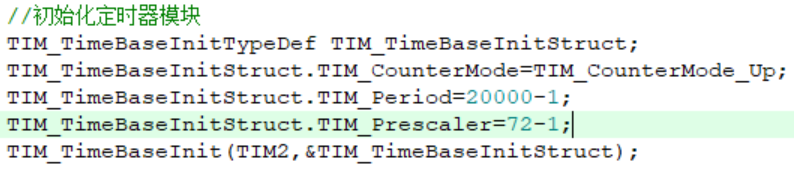
至于TIM2定时器模块,在初始化时没有采用上次手动输入参数的形式,由于项目的目标明确,所以先计算出pwm的频率。
舵机的周期是20ms,那么取倒数之后就是所需pwm频率50hz,根据pwm的频率计算公式50=72MHz/(PSC+1)/(ARR+1);为计算方便的数值,PSC取71,ARR+1取20k。
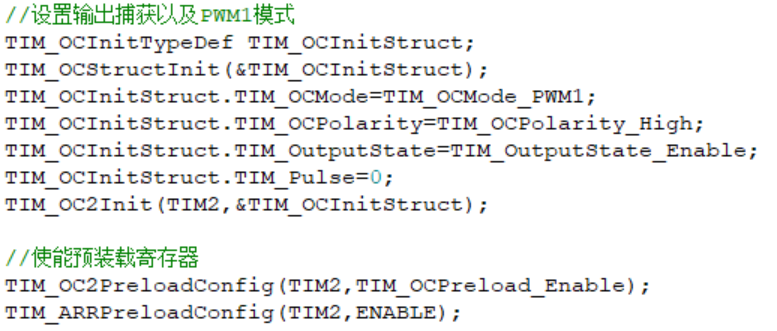
解决完定时器模块的初始化后,设置PWM的工作模式,Mode这里就选择最常用到的PWM1模式;极性设置polarity设置为高电平;而至于脉冲,先设置为0,之后再对输出比较通道CH2进行初始化。
就像之前说过的,这里需要手动使能(开启)预装载寄存器,最后开启定时器。
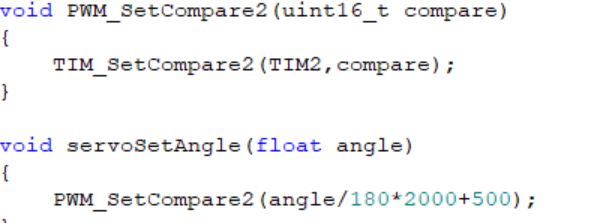
万事俱备后,就要进行舵机的配置,而舵机旋转角度与CCR值之间的数学关系可以通过查阅资料获得,代码如下
在主函数中,直接通过按键按下的形式实现舵机角度的旋转,但是这里对底层代码进行讲述,main函数中的部分暂时不讲。