**论文标题:
**
**YOLO26: KEY ARCHITECTURAL ENHANCEMENTS AND PERFORMANCE BENCHMARKING FOR REAL-TIME OBJECT DETECTION **
论文 链接 **:
**
摘要
本研究对Ultralytics YOLO26进行了全面分析,重点阐述其关键架构改进及实时边缘物体检测性能基准测试。YOLO26于2025年9月发布,作为YOLO家族最新且最先进的成员,专为在边缘及低功耗设备上实现高效、精准且即用型部署而设计。本文依次详述YOLO26的架构创新:移除分布式焦点损失(DFL)、采用端到端无NMS推理、整合ProgLoss与小目标感知标签分配(STAL)机制,并引入MuSGD优化器实现稳定收敛。除架构革新外,本研究将YOLO26定位为多任务框架,支持目标检测、实例分割、姿态/关键点估计、定向检测及分类任务。我们展示了YOLO26在NVIDIA Jetson Nano和Orin等边缘设备上的性能基准测试,并与YOLOv8、YOLOv11、YOLOv12、YOLOv13及基于Transformer的检测器进行对比。本文进一步探讨了实时部署路径、灵活的导出选项(ONNX、TensorRT、CoreML、TFLite)以及INT8/FP16量化方案。重点展示了YOLO26在机器人、制造和物联网领域的实际应用场景,以证明其跨行业适应性。最后,针对部署提供了深入见解。
四大核心创新点
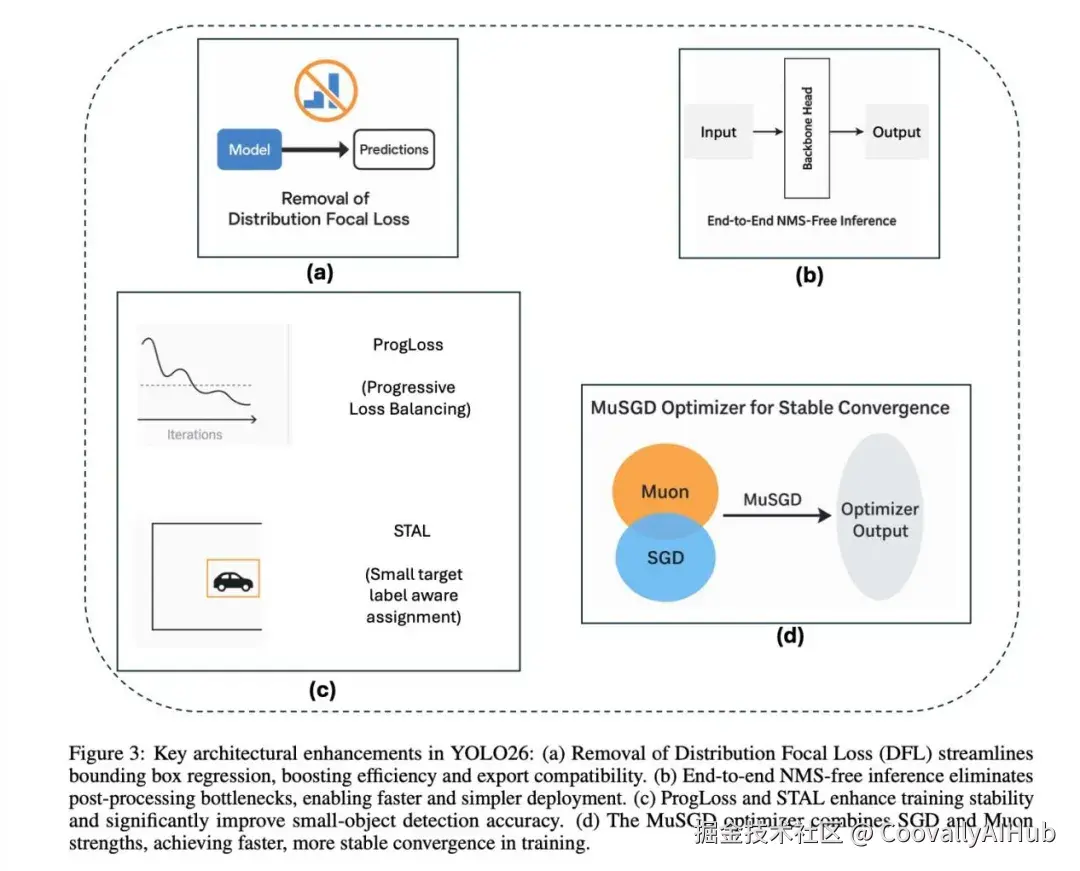
- 移除DFL(Distribution Focal Loss)
以往的YOLO模型(如YOLOv8)普遍采用DFL来提升边界框回归的精度,但这无疑增加了计算开销和模型导出的复杂度。YOLO26果断地移除了DFL模块,将边界框预测回归到更直接的回归任务,极大地简化了模型结构。这一改变不仅提升了推理效率,还使得模型能够更轻松地导出到ONNX、TensorRT、CoreML等不同平台。
- 端到端无NMS(NMS-free)推理
非极大值抑制(NMS)作为目标检测后处理的标配,一直是推理速度的瓶颈之一,并且需要手动调整超参数。YOLO26通过重新设计预测头,实现了真正的端到端无NMS推理。模型可以直接输出无冗余的检测框,彻底告别了后处理的烦恼。这一突破性的改进,使得YOLO26在CPU上的推理速度相比前代模型提升了高达43%(以nano模型为例),对于延迟敏感的移动设备、无人机和嵌入式平台而言,这无疑是巨大的福音。
- 引入ProgLoss与STAL
为了解决训练稳定性和小目标检测这两大难题,YOLO26引入了两种新策略。ProgLoss(Progressive Loss Balancing)能够在训练过程中动态调整不同损失成分的权重,防止模型在训练后期对某些类别过拟合,从而提升了泛化能力。而 STAL(Small-Target-Aware Label Assignment)则是一种专门针对小目标的标签分配策略,它在训练时会优先考虑那些像素占比小、易被忽略的目标,显著增强了模型在拥挤场景或远距离视角下对小目标的识别准度。
- 采用MuSGD优化器
借鉴近年来大语言模型(LLM)训练中的优化技术突破,YOLO26引入了一种名为MuSGD的混合优化器。它结合了传统随机梯度下降(SGD)的鲁棒性和Muon优化器的自适应特性,能够在多样化的数据集上实现更快、更稳定的收敛。这意味着开发者可以用更少的训练周期和计算资源,达到理想的模型精度。
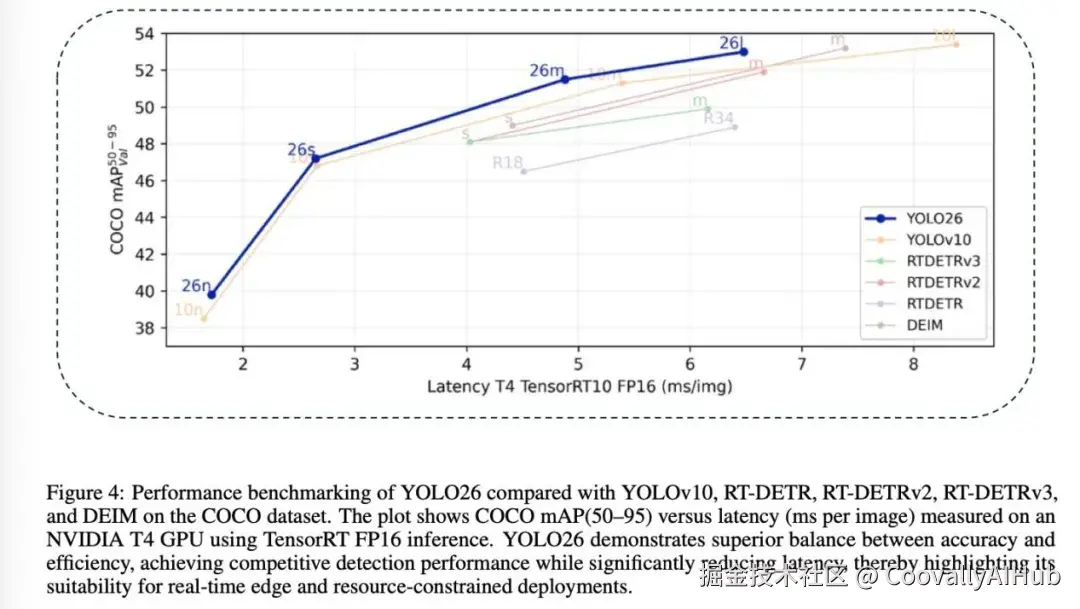
基准测试与对比分析
在YOLO26的案例中,我们进行了一系列严格的基准测试,以评估其相对于YOLO系列前代模型以及其他先进架构的性能。图4综合展示了此次评估的结果,该图在NVIDIA T4 GPU并使用TensorRT FP16优化的环境下,绘制了COCO mAP(50--95)与延迟(每图像毫秒数)的关系图。纳入YOLOv10、RT-DETR、RT-DETRv2、RT-DETRv3和DEIM等竞争架构,全面呈现了实时检测领域的最新进展。从图中可以看出,YOLO26展现出了独特的定位:它在保持与RT-DETRv3等基于Transformer的模型相媲美的高精度水平的同时,在推理速度方面显著优于它们。例如,YOLO26-m和YOLO26-l分别实现了超过51%和53%的竞争性mAP分数,但延迟却大幅降低,这凸显了其无NMS架构和轻量级回归头的优势。
结论
YOLO26 的一个主要贡献在于其对部署优势的强调。该模型的架构经过精心优化,以适应实际应用:通过省略 DFL 和 NMS,YOLO26 避免了在专用硬件加速器上难以实现的操作,从而提高了跨设备的兼容性。该网络可导出为多种格式,包括 ONNX、TensorRT、CoreML、TFLite 和 OpenVINO,确保开发人员能够同样轻松地将其集成到移动应用、嵌入式系统或云服务中。关键的是,YOLO26 还支持鲁棒的量化:得益于其简化架构对低比特宽度推理的耐受性,它可以采用 INT8 量化或半精度 FP16 进行部署,且对精度影响最小。这意味着模型可以在压缩和加速的同时,仍能提供可靠的检测性能。这些特性转化为真实的边缘性能提升------从无人机到智能摄像头,YOLO26 可以在 CPU 和小型设备上实时运行,而以前的 YOLO 模型在这些设备上运行困难。所有这些改进都证明了一个总体主题:YOLO26 弥合了前沿研究思想与可部署 AI 解决方案之间的差距。这种方法凸显了 YOLO26 作为学术创新与行业应用之间桥梁的角色,将最新的视觉进展直接交到实践者手中。
未来方向
部署仍然是一个首要关注点,未来的研究可能会强调边缘感知的训练和优化。这意味着模型开发将越来越多地从训练阶段就开始考虑硬件约束,而不仅仅是事后补救。诸如量化感知训练(在训练期间模拟低精度算术)等技术可以确保网络在被量化为 INT8 以进行快速推理后仍能保持准确。我们可能还会看到神经架构搜索和自动化模型压缩在打造 YOLO 模型时成为标准做法,从而使每个新版本在构思时都共同考虑到特定的目标平台。此外,将来自部署的反馈(例如设备上的延迟测量或能耗)纳入训练循环是一个新兴的想法。例如,一个针对边缘优化的 YOLO 可以学会根据运行时约束动态调整其深度或分辨率,或者从一个更大的模型蒸馏到更小的模型,且性能损失最小。通过在训练时考虑这些因素,所产生的检测器将在实践中实现精度与效率之间的更优权衡。随着目标检测器进入物联网、AR/VR 和自主系统等领域,在这些领域,有限硬件上的实时性能是不可妥协的,这种对高效 AI 的关注至关重要。