外设需要驱动的时候用复用推挽输出模式。
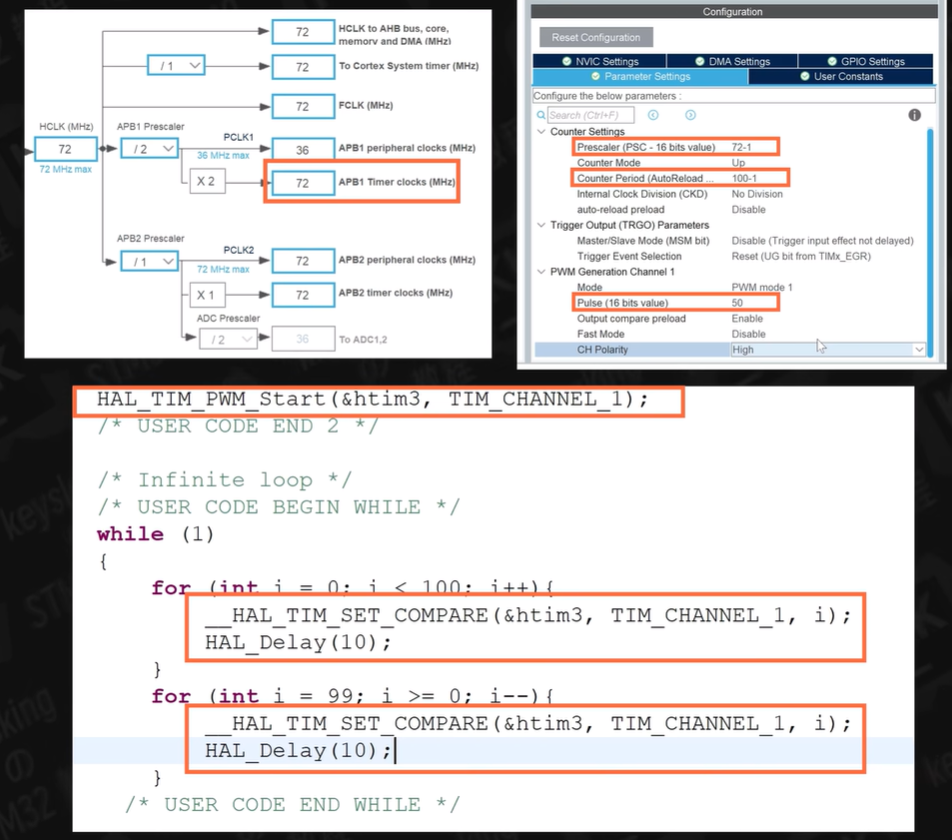
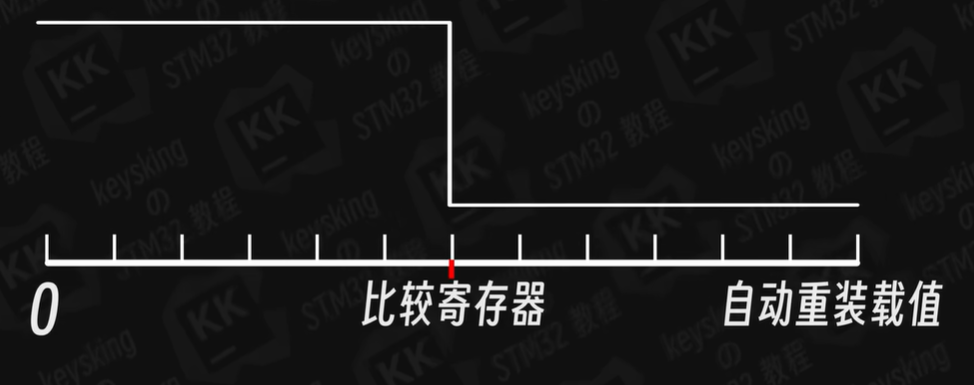
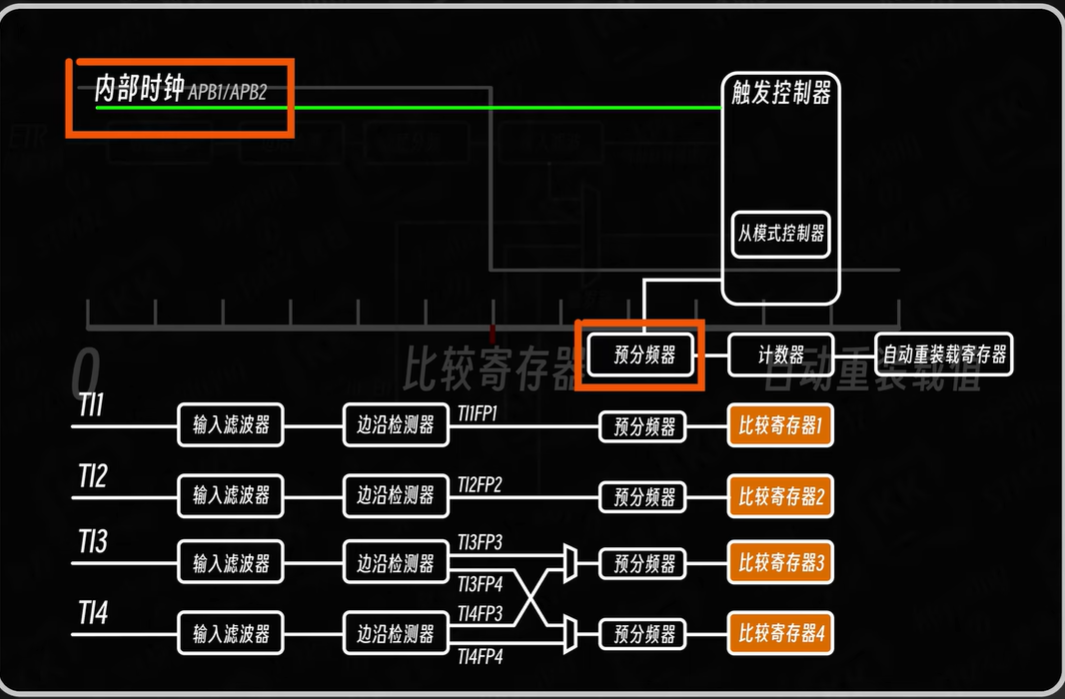
在使用时,根据时钟树中对应APB的定时器时钟线的频率,结合预分频器以及自动重装载寄存器,我们就可以设置出需要的PWM频率(周期),比较寄存器与自动重装载寄存器的比值就是PWM的占空比。当然如果换到PWM模式2或者修改输出极性情况会有所不同。
在代码中我们使用HALTIM_PWM_Start函数可以启动PWM输出,当然也有对应的HALTIM_PWM_Stop函数停止PWM输出;通过HAL TIMSETCOMPARE函数我们可以修改比较寄存器的值,也就修改了PWM的占空比
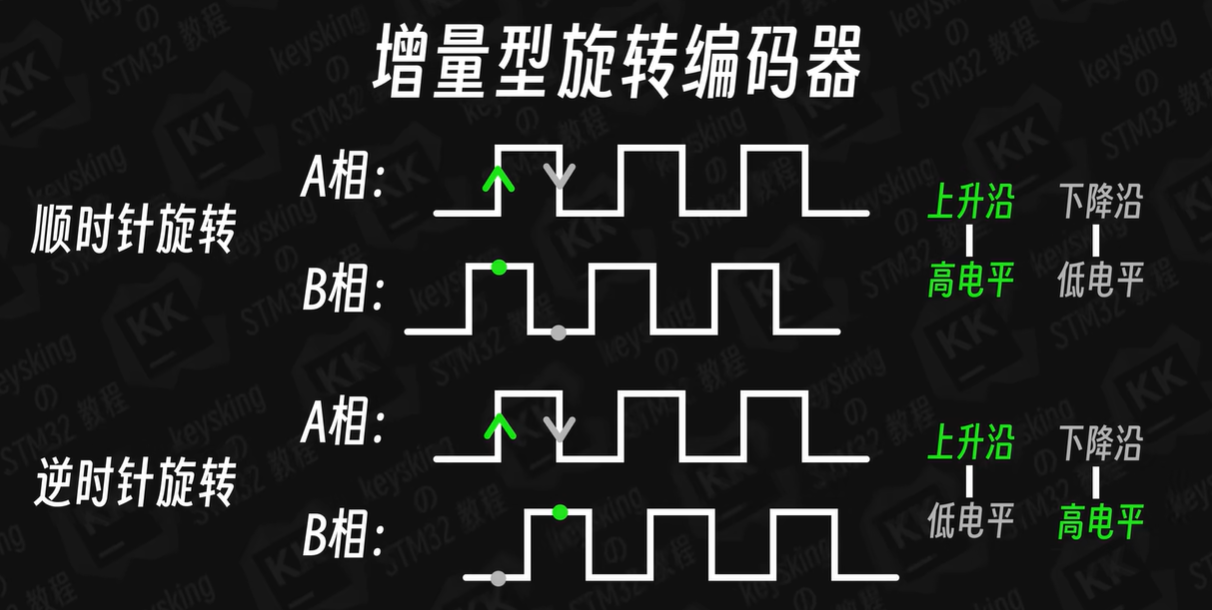
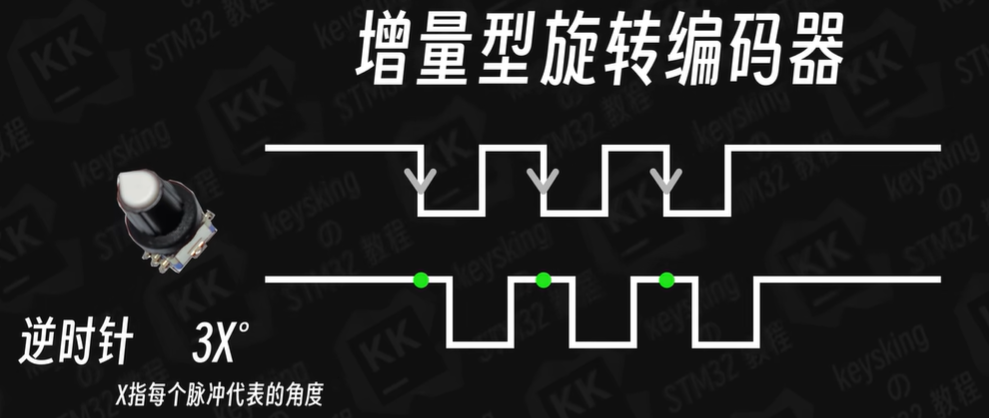
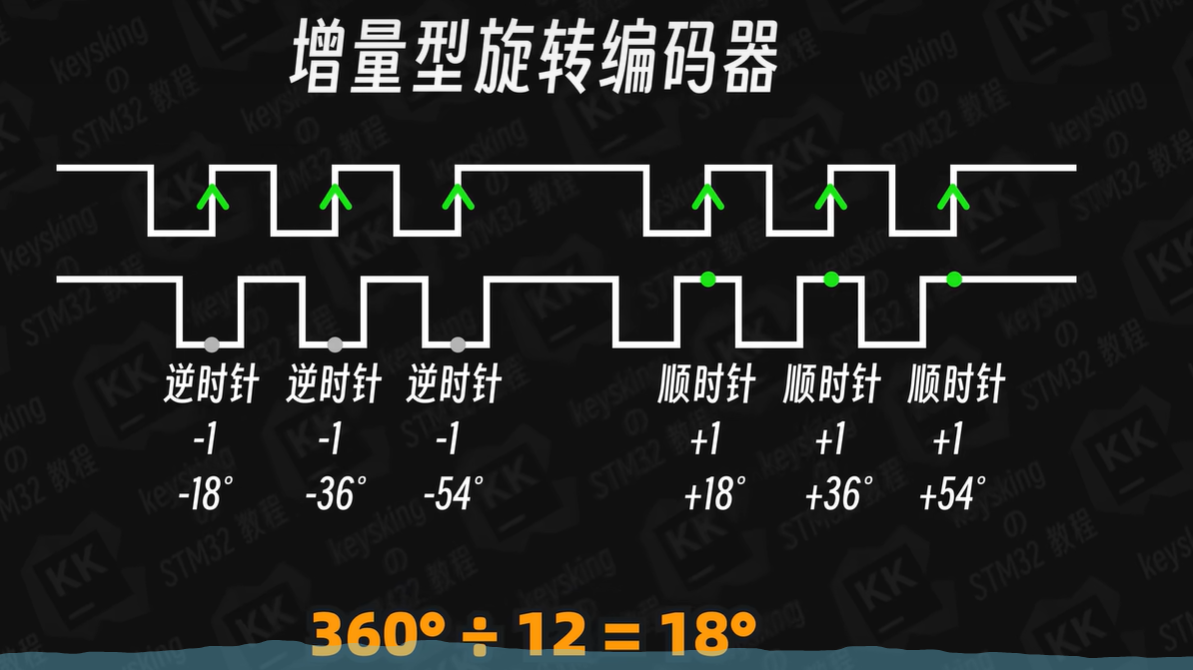
旋转编码器
它每360度输出20个脉冲,也就是每个脉冲代表18度,用脉冲数量乘以18度就可以得出真实的旋转角度
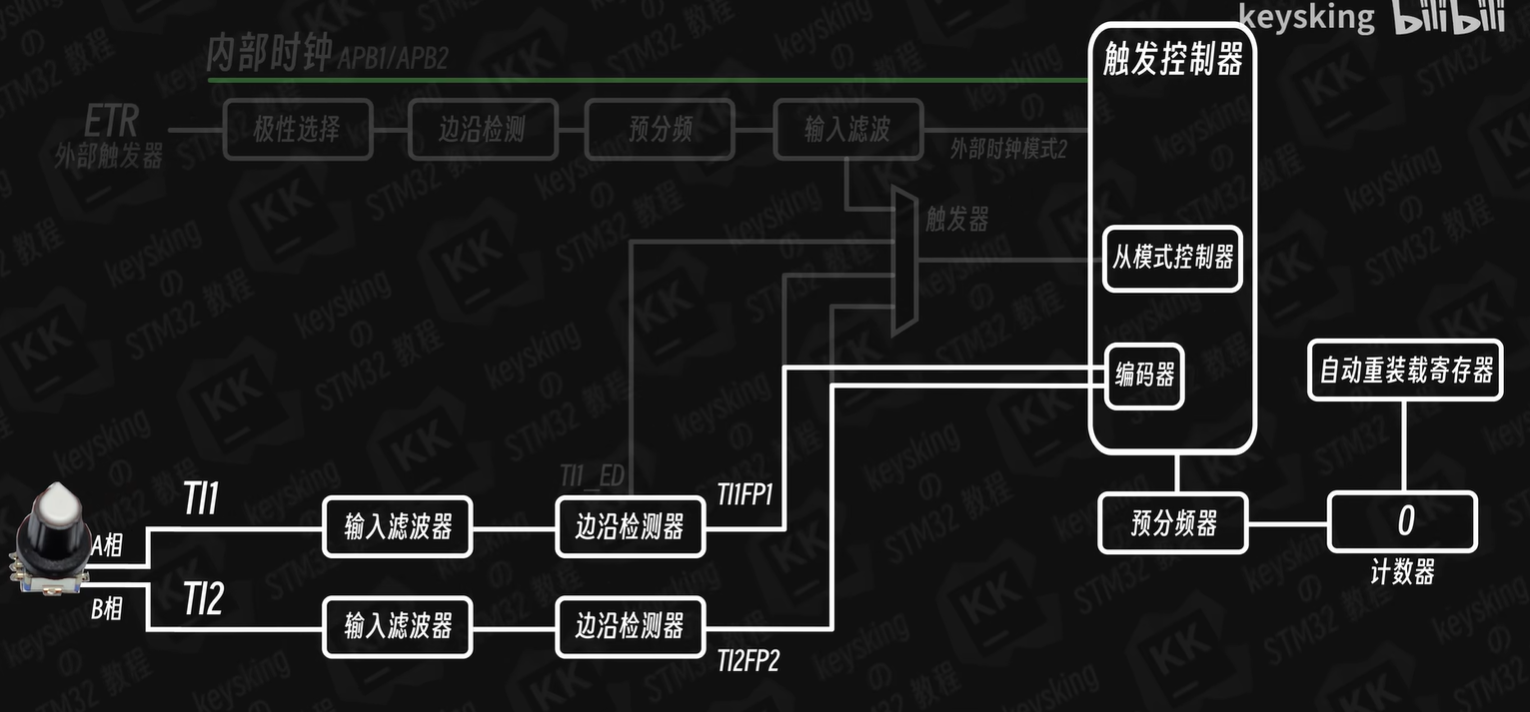
定时器:
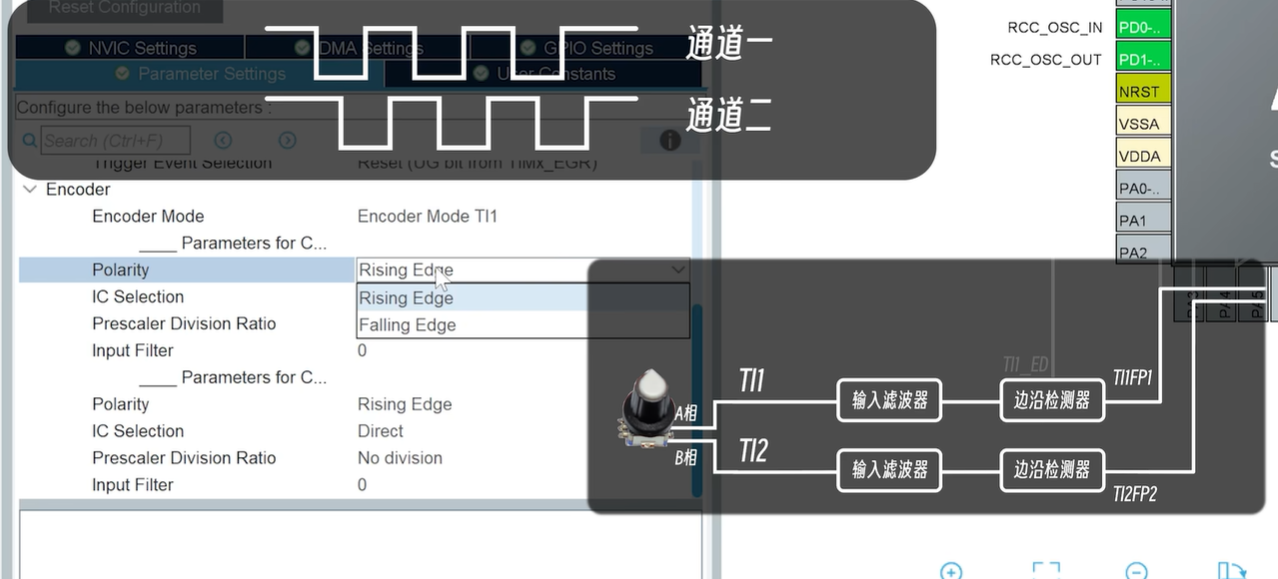
编码器模式:
输入捕获只能进行直接捕获走TI1FP1和TI2FP2
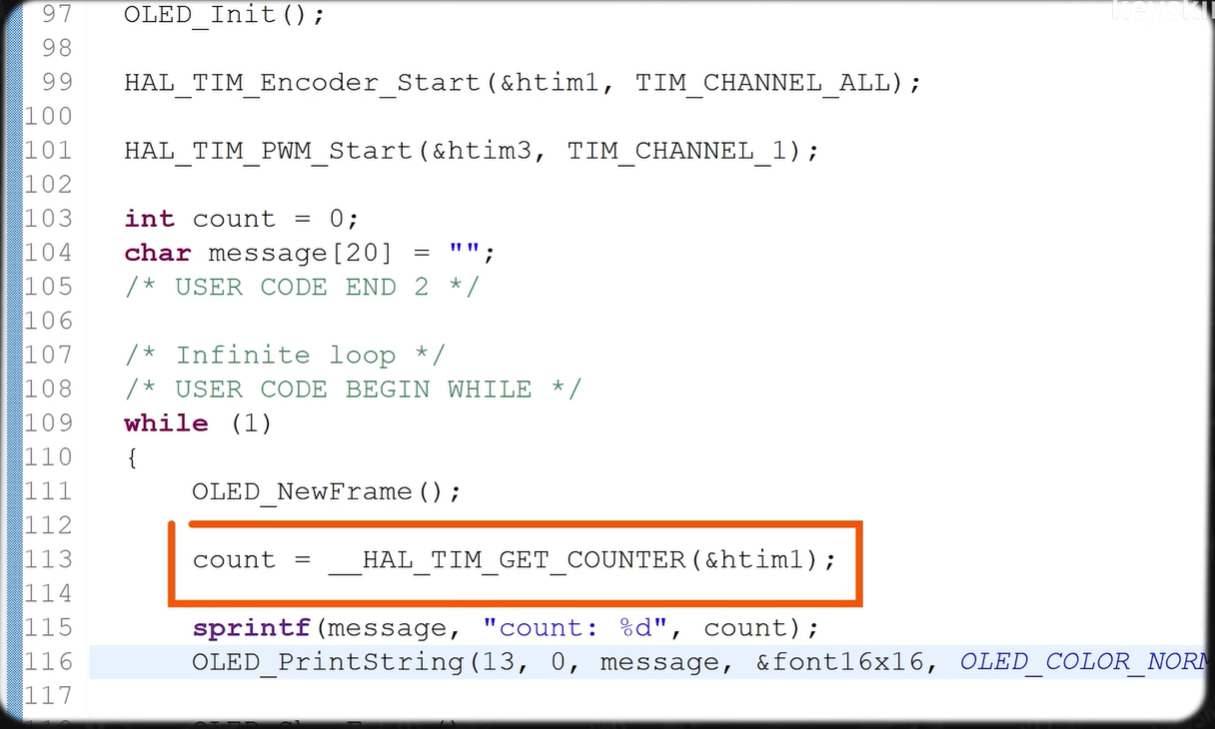
代码里HAL_TIM_Encoder_Start编码器,随后获取计数器的值就好啦。
舵机
大于输出比较寄存器时输出另一种电平,修改定时器时钟源的速度以及预分频器等设置,可以修改计数器计数的速度。再加上修改自动重装载值,就可以调节PWM的周期频率。修改比较寄存器的大小,就可以调节PWM的占空比
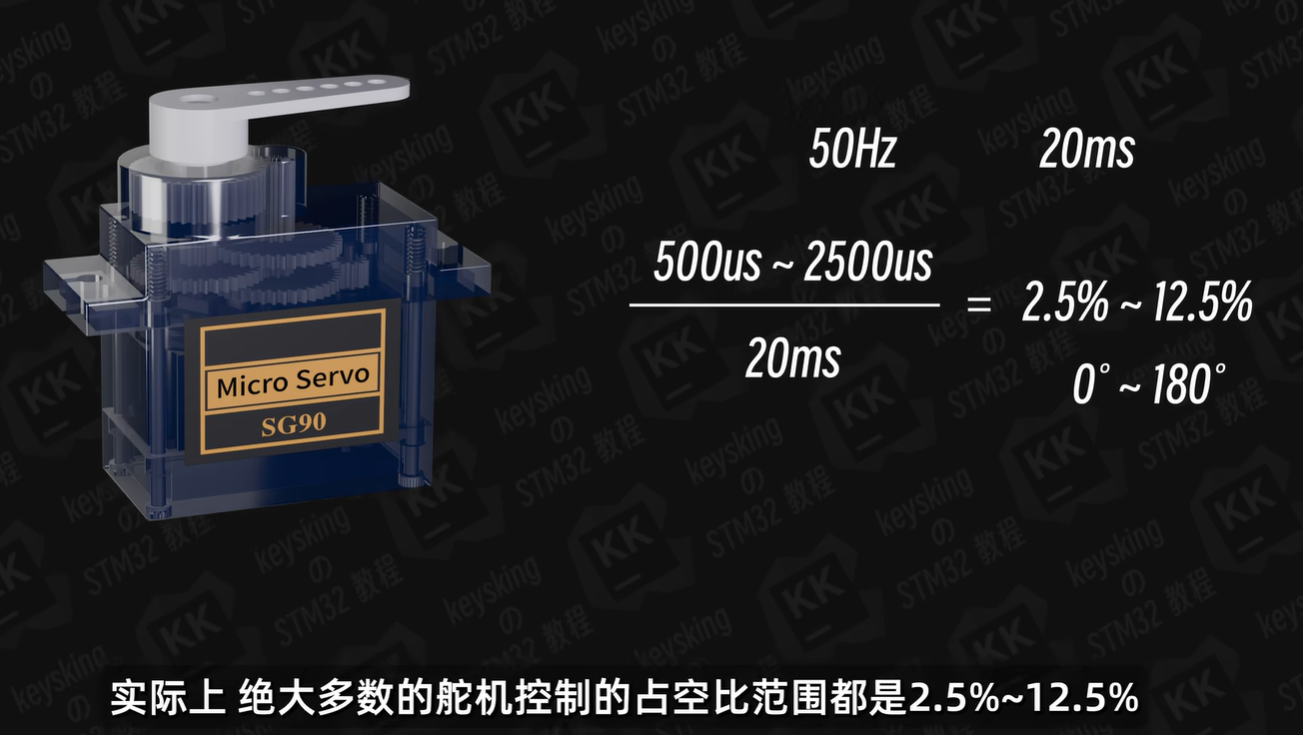
实际上绝大多数的舵机控制的占空比范围都是2.5%~12.5%,因为绝大多数的航模遥控器也都是输出这个范围的信号,

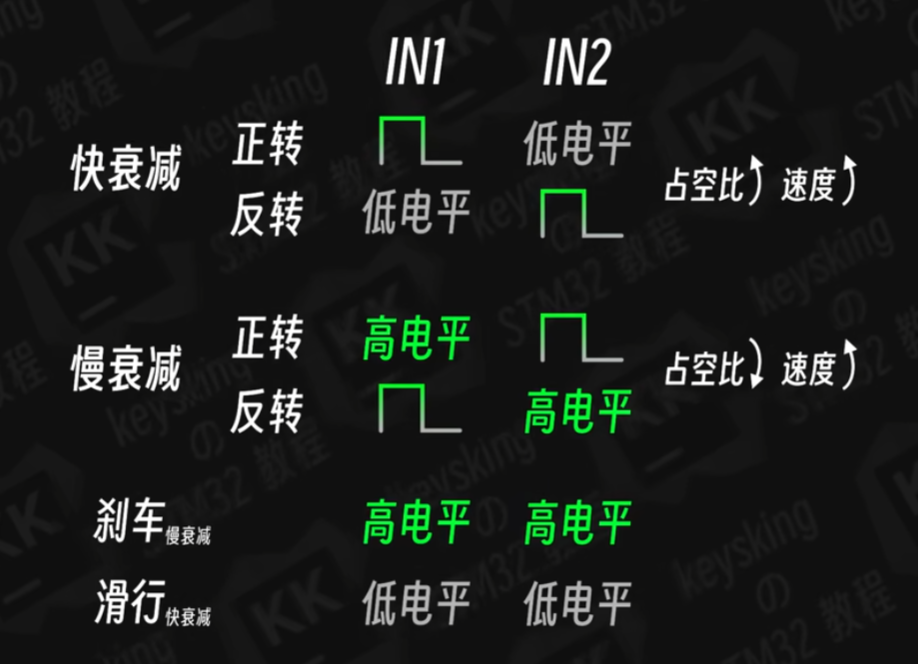
DRV8833控制电机,需要熟悉PWM