
目录
前言
e²之前没有接触过,为了快速的体验这款产品,这次先使用了keil 5.39+RASC 6.1.0的方式搭建编译项目,做了一个点灯测试,其中也遇到了一些问题,从网上看别的博主的帖子也没怎么交代过,所以感觉还是有必要讲一讲的。
1.下载环境
keil的话这个就不用说了吧,估计每个嵌入式软件工程师都有安装,所以说一下RASC 6.1.0以及keil的组件包。
我刚开始看教程上都从github上下载的RASC 5.8.0以及对应版本的keil组件包,我就说和教程保持一致吧,哪知道下载速度非常慢,而且下载到一半多的时候,有时候直接失败,然后需要重新下载,可能是因为github本身的网络问题,最后选择了最新的RASC 6.1.0以及keil的组件包,下载速度就比较快了,十来分钟就完成下载。下载keil的组件包在页面比较靠下的位置。
RASC和Keil软件支持包GitHub下载地址:
https://github.com/rene[sas](https://www.hqchip.com/app/1686 "sas")/fsp/releases
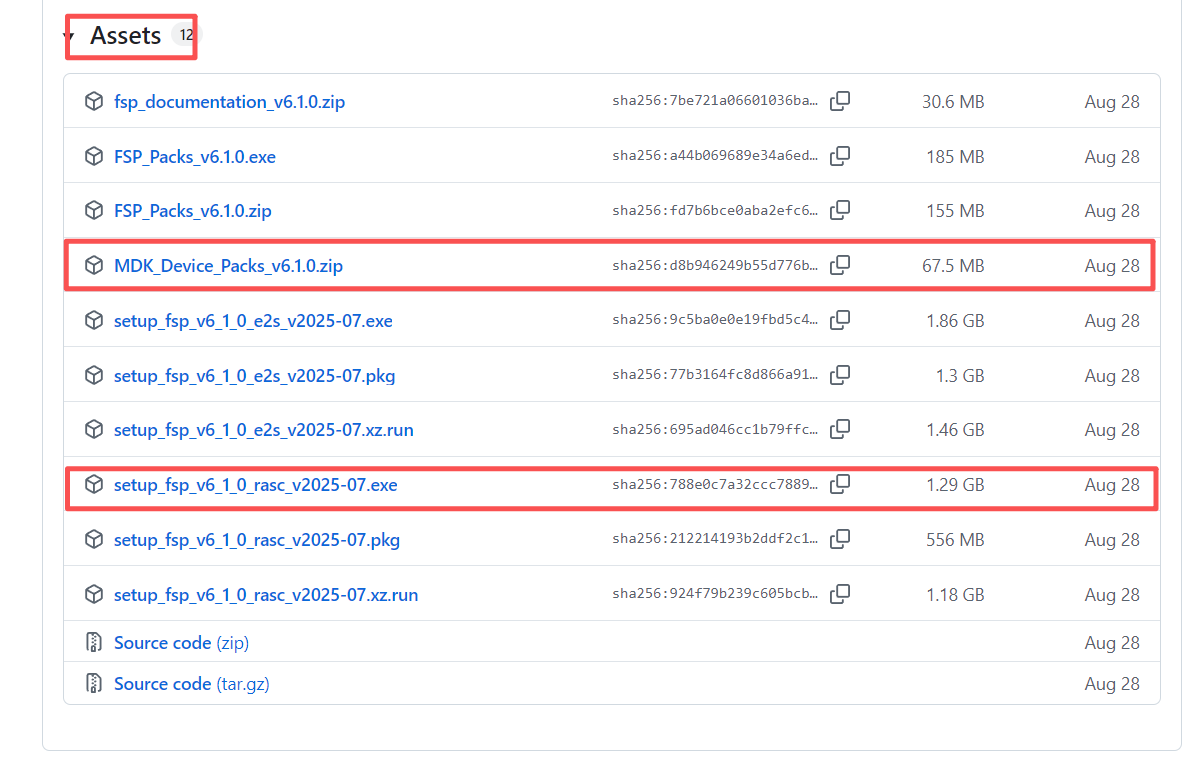
有keil环境的下载这两个就可以了。
安装没有什么特殊的,都是直接下一步就可以了。
2.RASC搭建项目
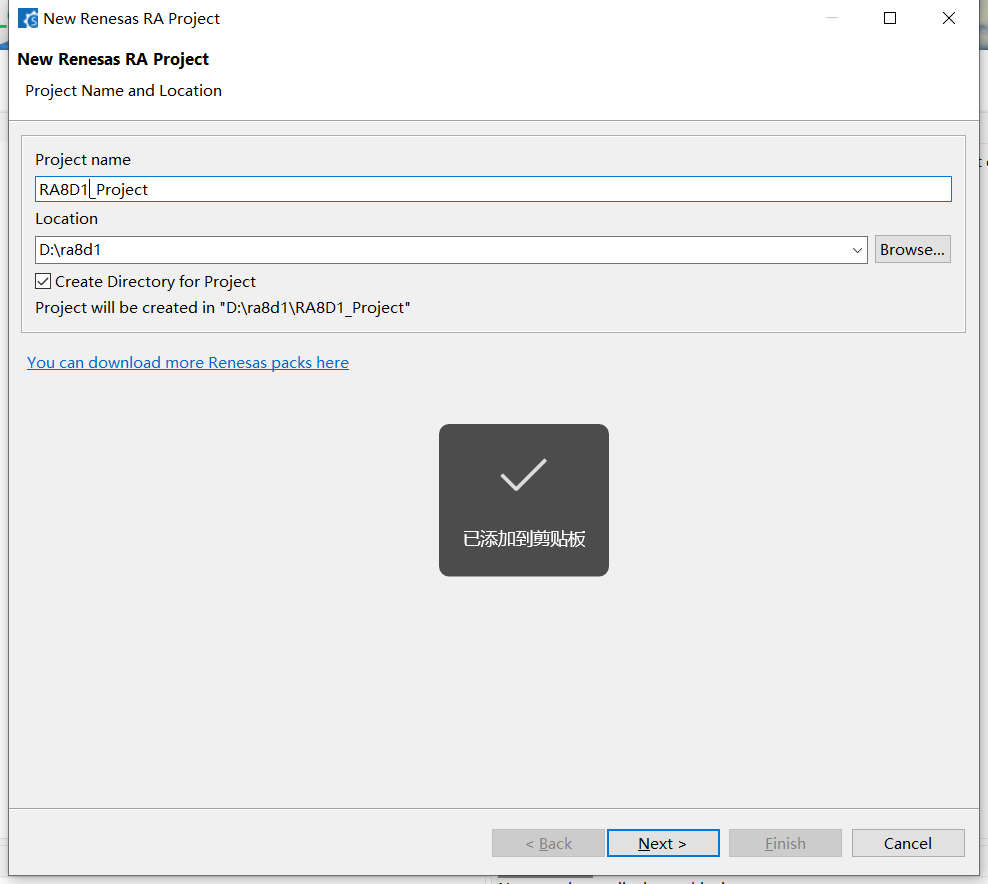
(1)创建项目,改项目名称以及项目路径。
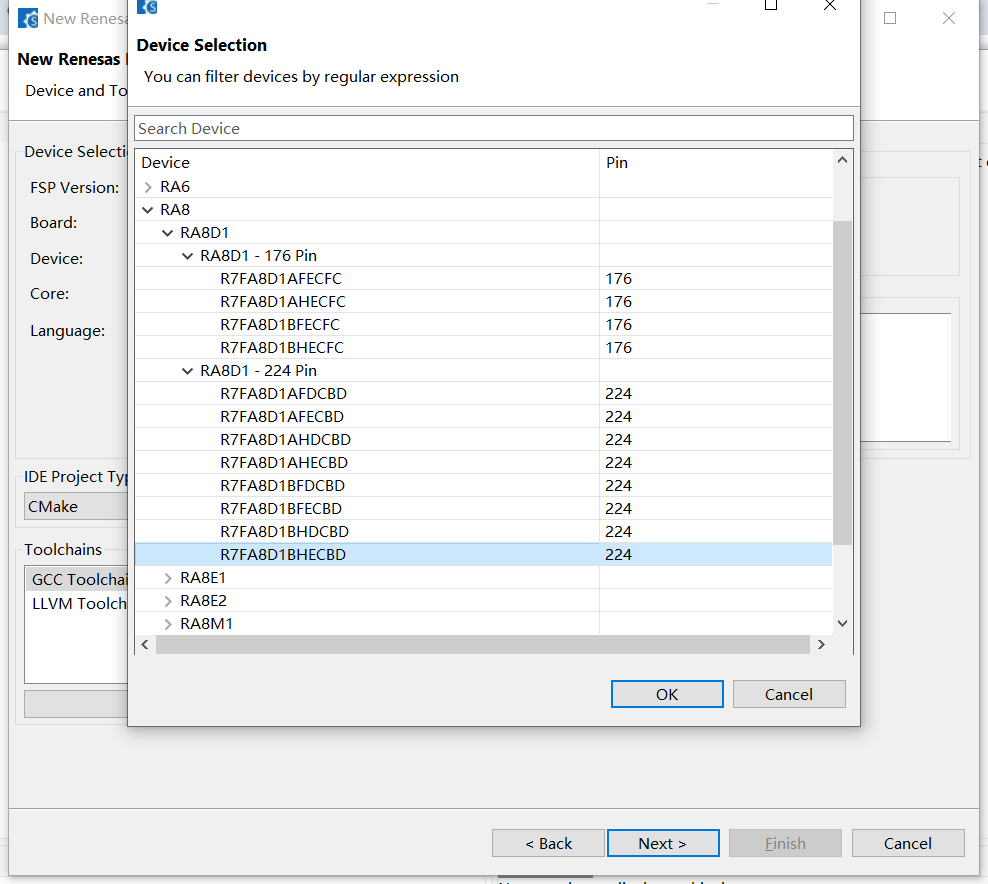
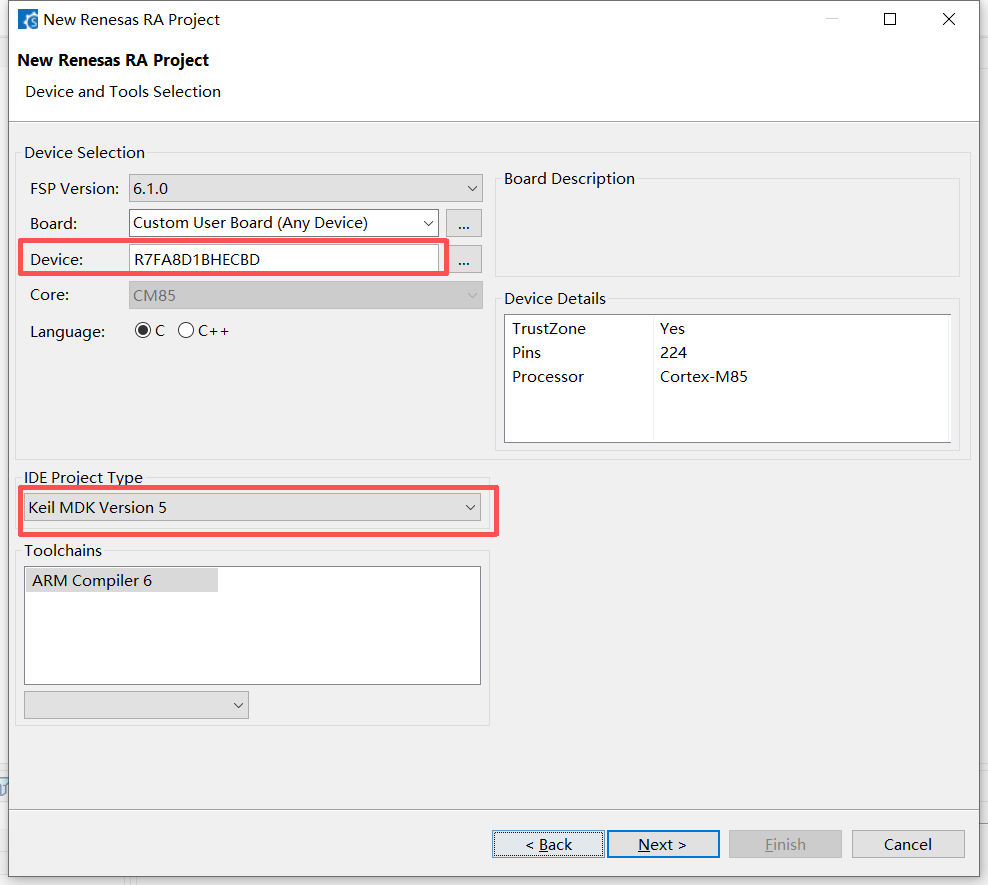
(2)选择芯片型号。我们这款套件的型号是R7FABD1BHECBD。
(3)选择IDE为keil5
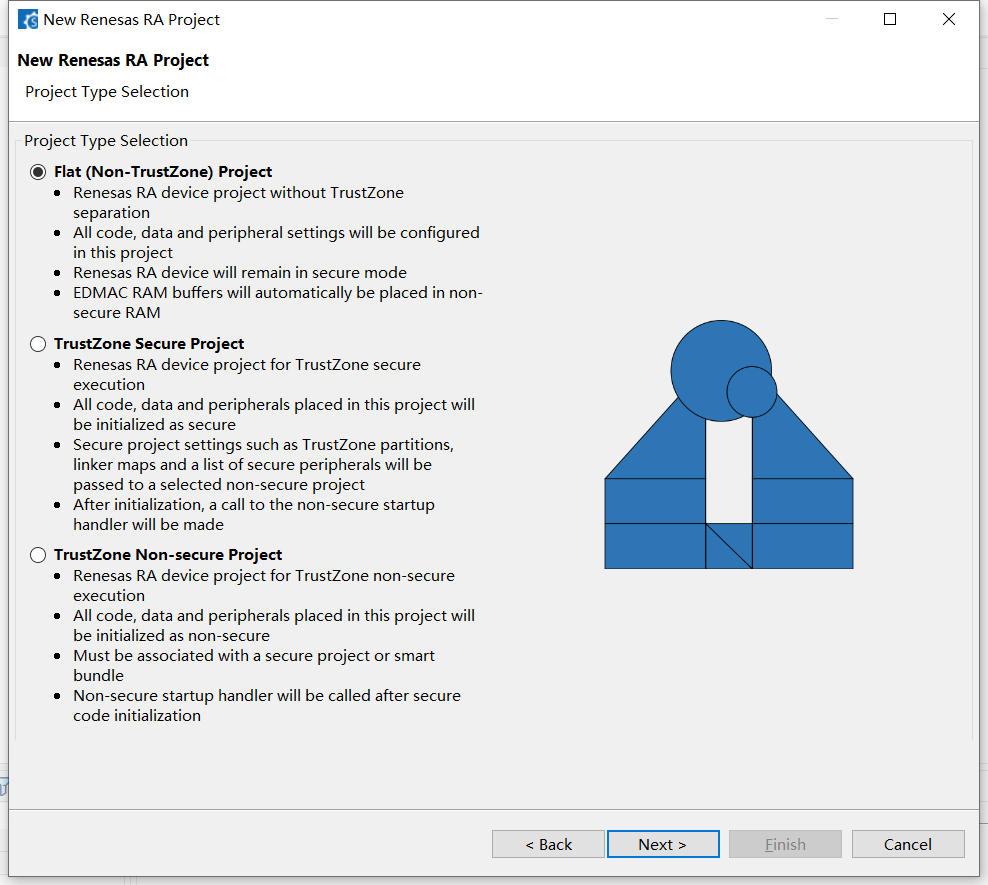
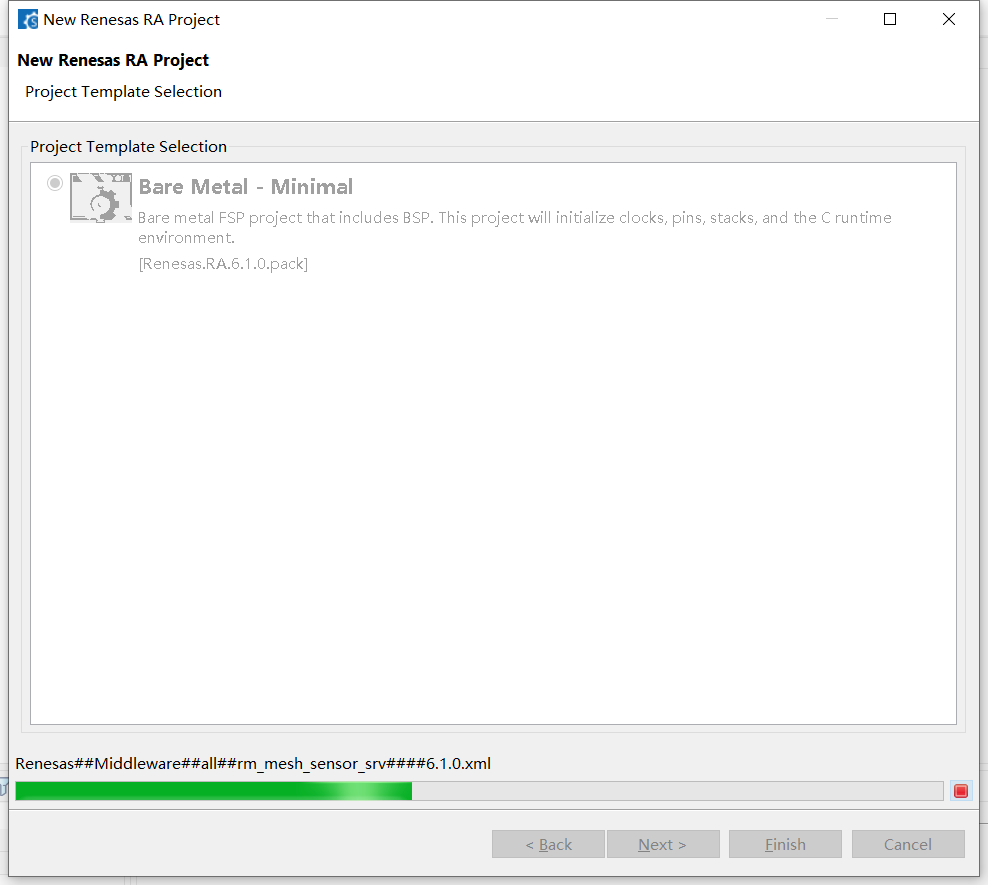
(4)后面的都选择默认即可
(5)最后点Finish,创建完成
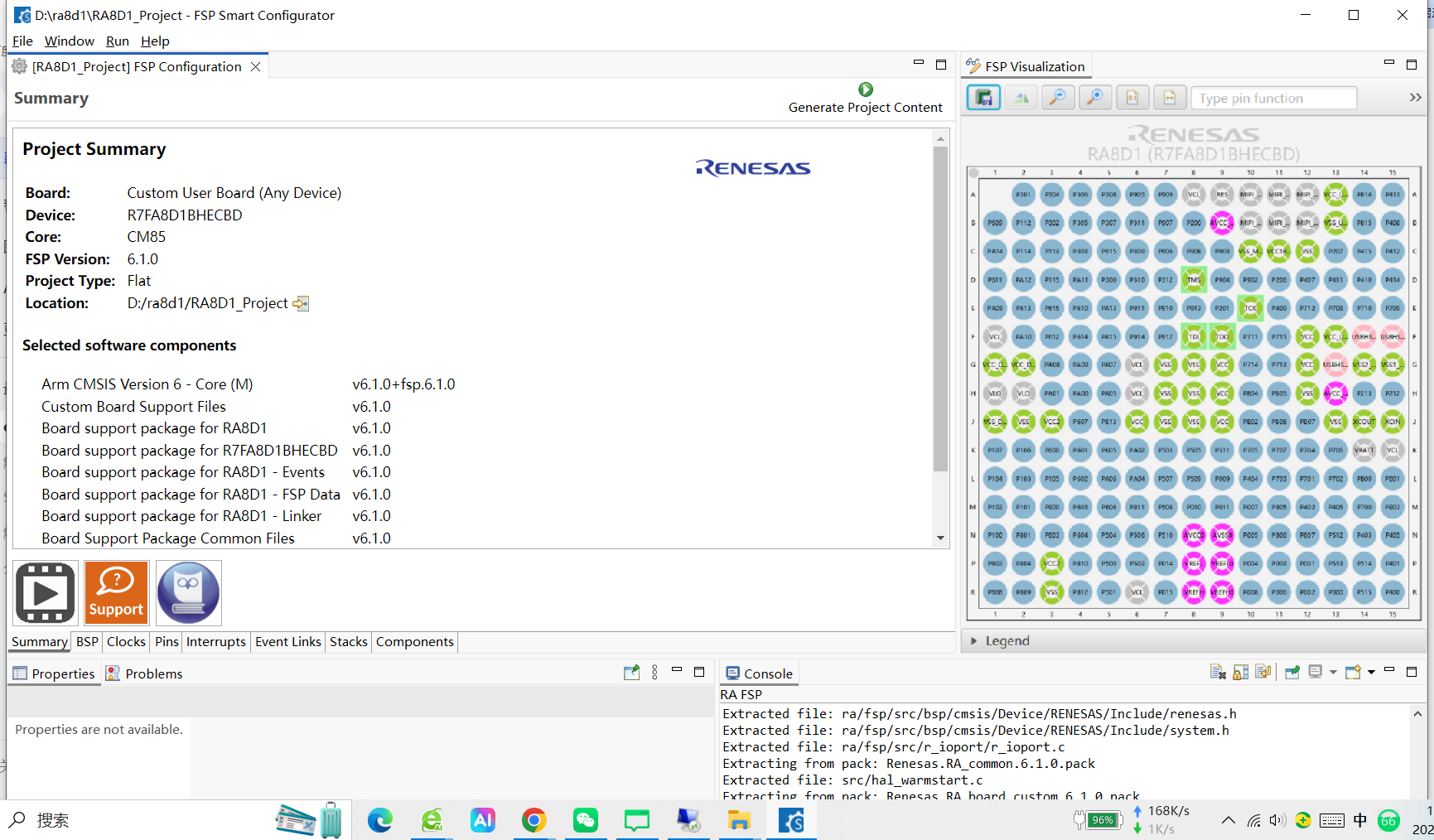
(6)创建完成以后,我们会进入到下面这个界面。
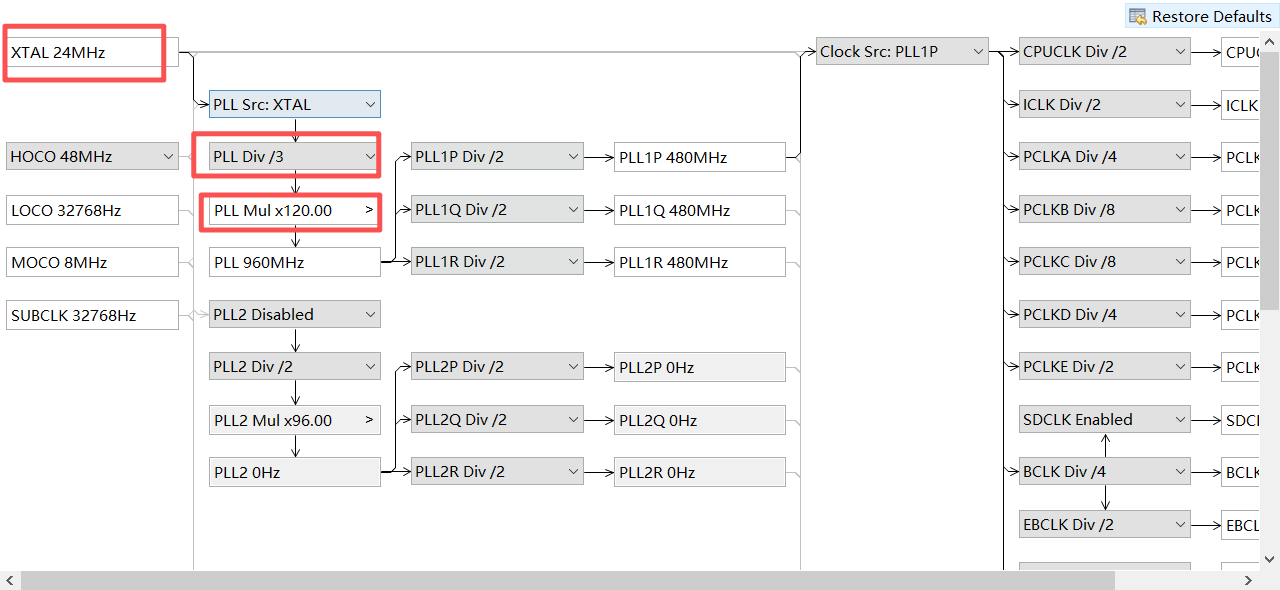
(7)我们需要修改一下时钟,配置开发板晶振频率为24M,倍频也修改下,改下面这三个位置,其他时钟暂时默认。
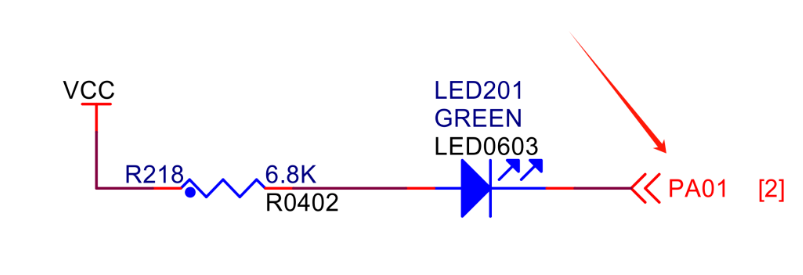
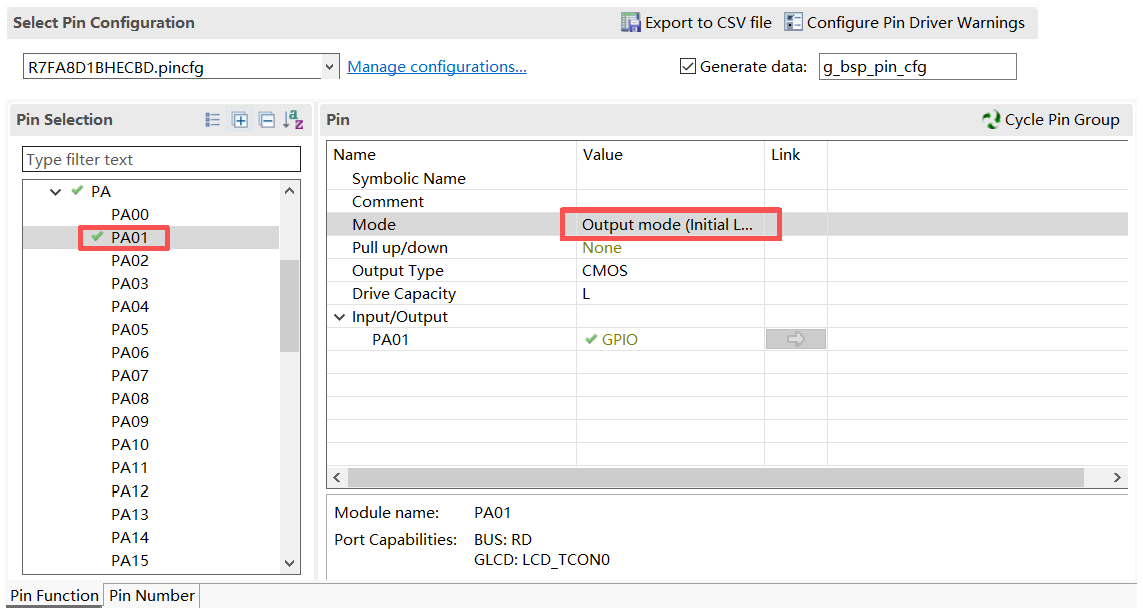
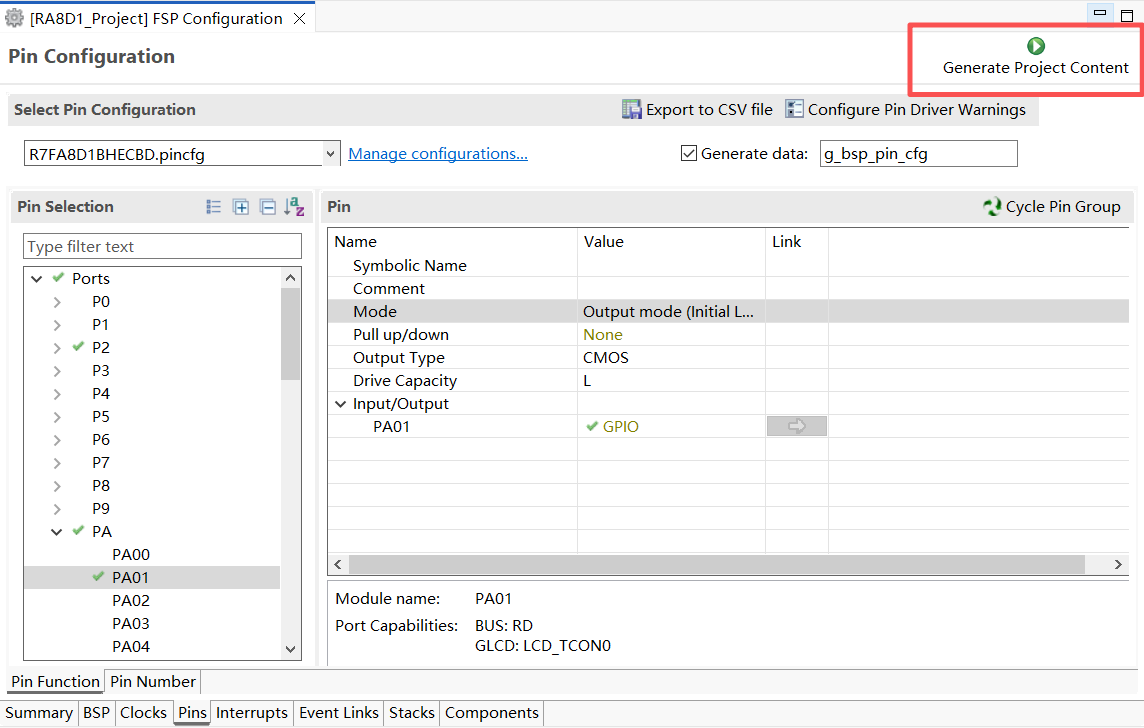
(8)根据原理图,用户LED灯为PA1。
我们在Pins界面中,将PA1引脚配置成拉低输出。
(9)生成代码
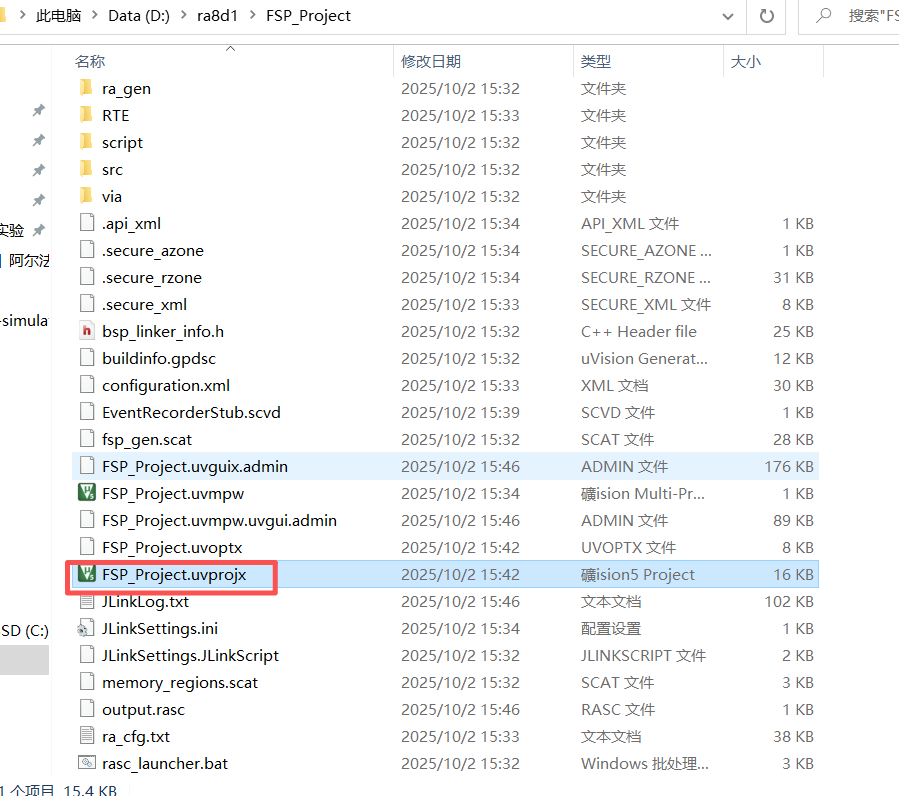
3.keil打开项目
RASC搭建好的项目,进去第一级文件夹会直接看到可以被keil打开的FSP_Project.uvprojx。
打开项目以后,我们这个时候编译项目就不会报错,但是,但是,下载出现了问题,虽然选择了JLINK,RW,但是下载的时候依然报错,后来找到了原因,是RASC搭建好的项目没有为我们配置好Target中的IRAM,IROM,以及下载器配置中的FlashDownload。两个解决办法,第一种是按照我下图的配置自己配置一下,另外一个解决办法是先将Device换一个CPU型号,再换回来,就有默认的配置了。
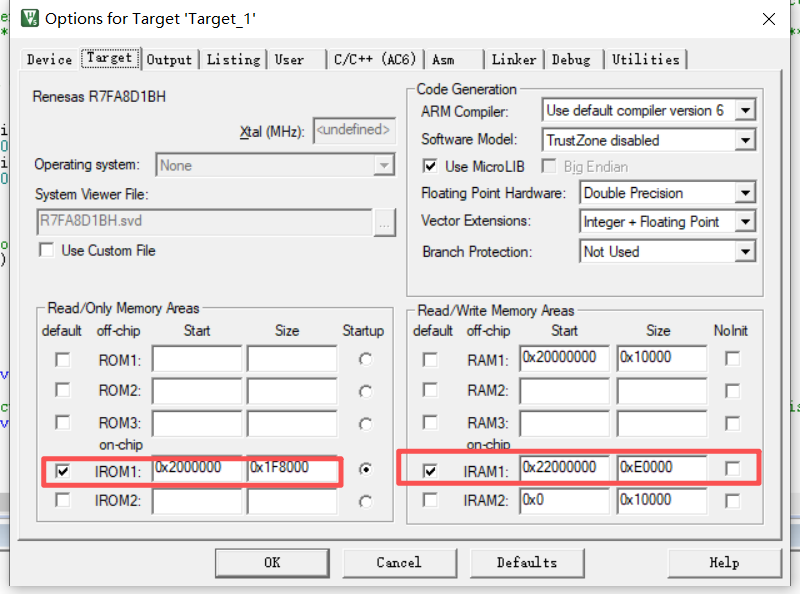
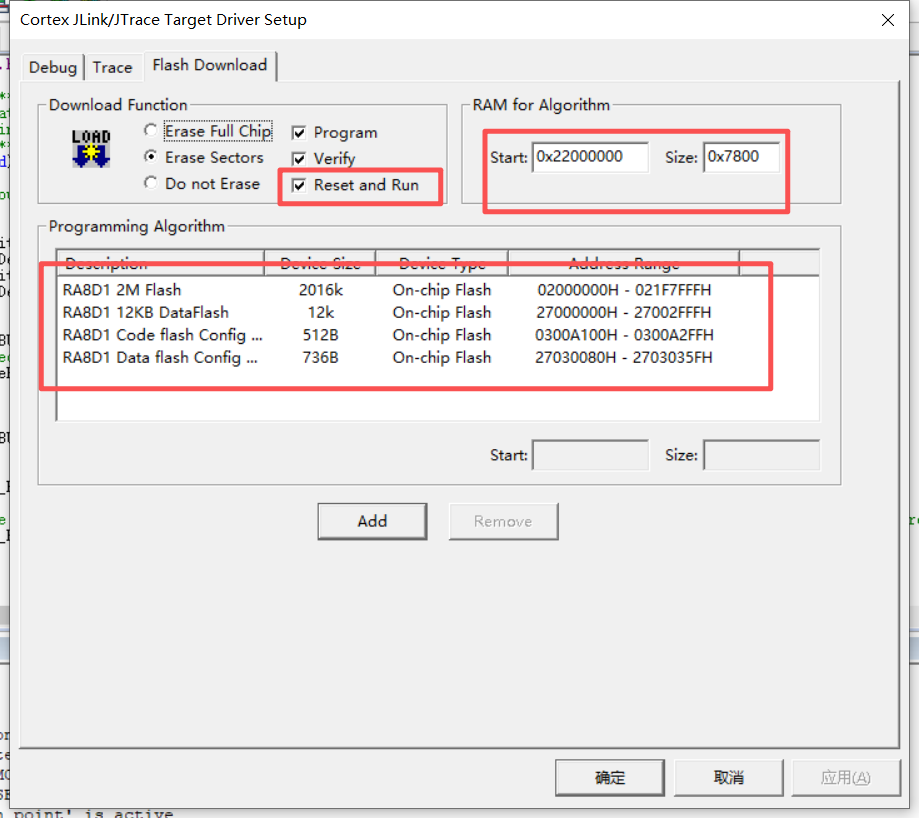
然后就可以下载进去程序了。

4.点灯测试
在hal_entry.c中的hal_entry函数中,加入以下代码:
void hal_entry(void)
{
/* TODO: add your own code here */
while(1)
{
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_10_PIN_01, BSP_IO_LEVEL_LOW);
R_BSP_SoftwareDelay(1000, BSP_DELAY_UNITS_MILLISECONDS); //LED亮 延时1000ms
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_10_PIN_01, BSP_IO_LEVEL_HIGH);
R_BSP_SoftwareDelay(1000, BSP_DELAY_UNITS_MILLISECONDS); //LED灭 延时1000ms
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}编译下载程序,用户LED灯以1s延时闪动,点灯测试成功。