下载源码,精简文件
官网下载RT-Thread_Nano版源码,同时精简文件。
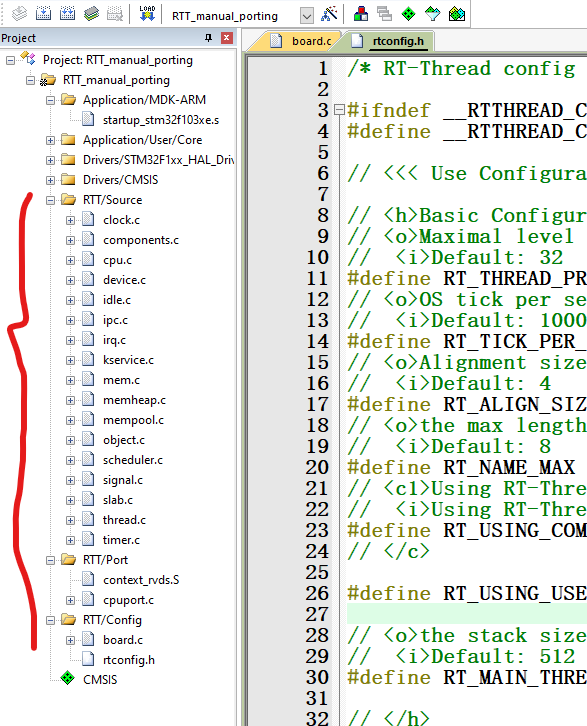
bsp目录下只留下board.c和rtconfig.h

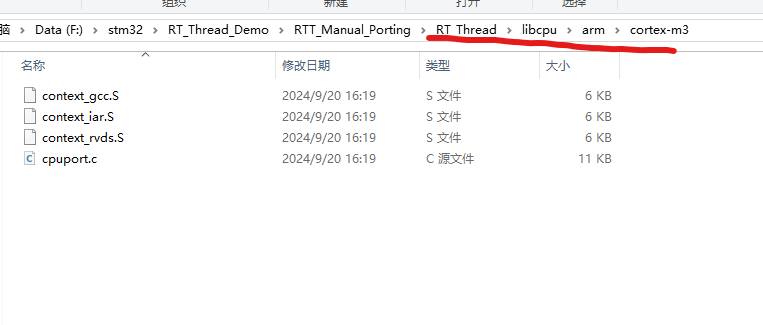
libcpu文件夹只保留移植板子需要文件。这里板子是stm32F103ZET6,为m3架构,所以除m3架构外,其他文件全部删除。
CubeMX配置
虽然CubeMX有一键配置FreeRTOS的功能,但是由于产品选型不一定选择STM芯片,因此这里选择自己移植RT-Thread。
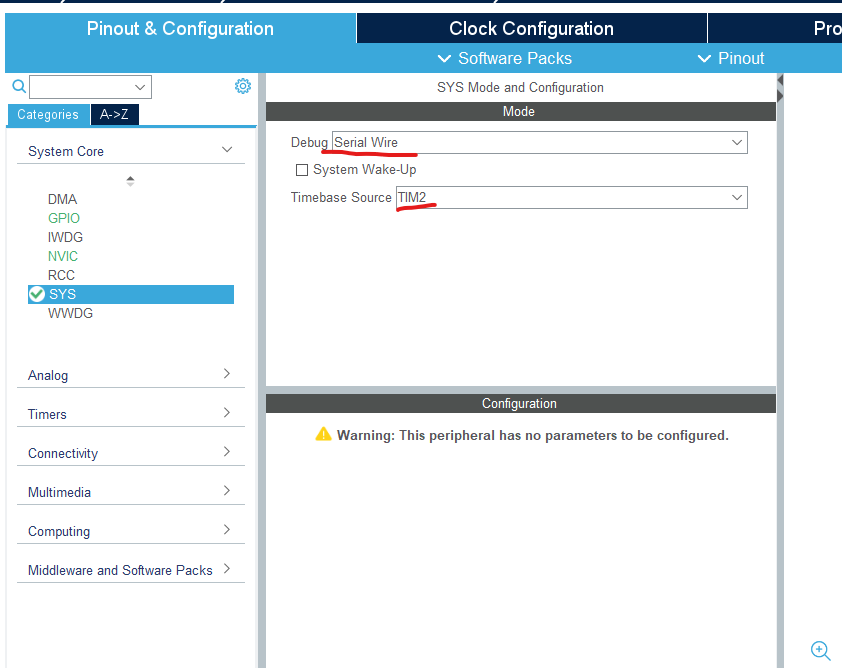
Sys配置
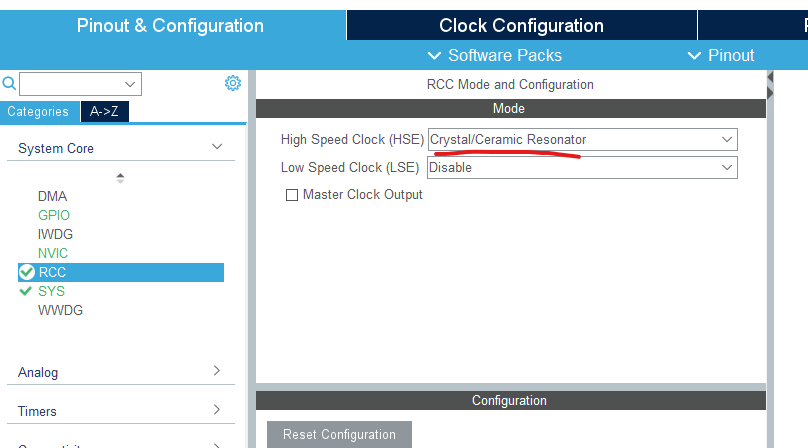
RCC配置
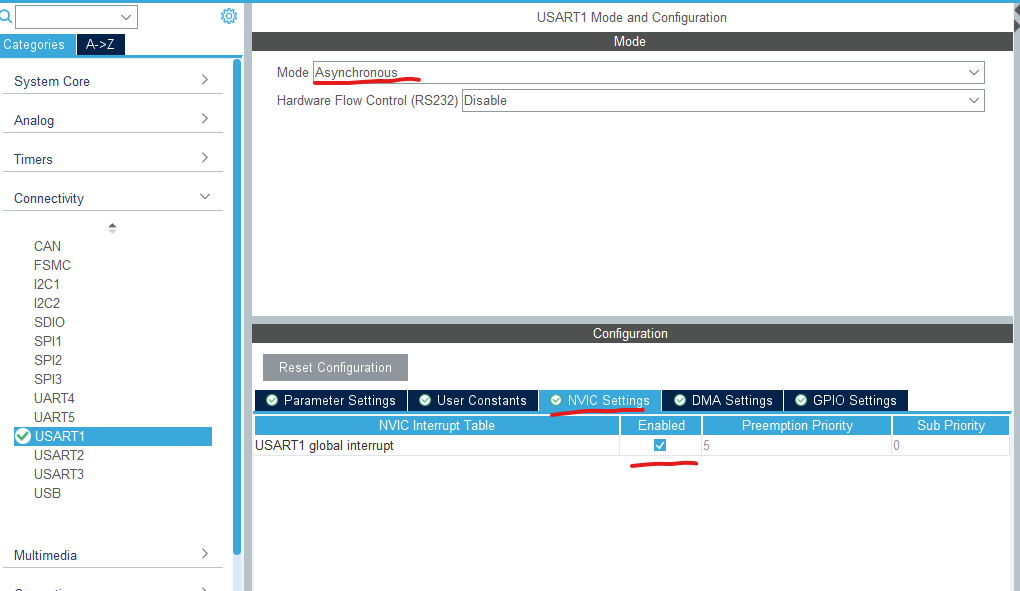
串口设置
设置一个串口,用作调试。
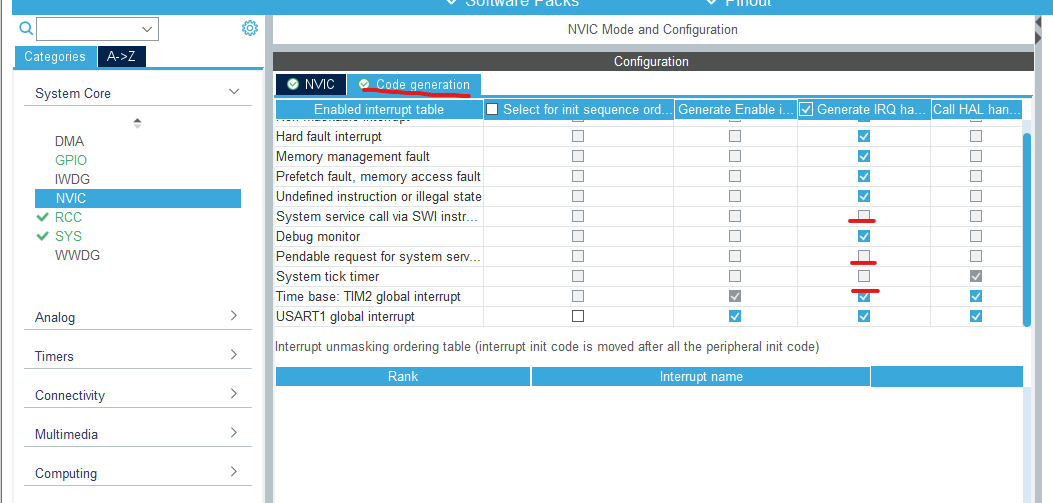
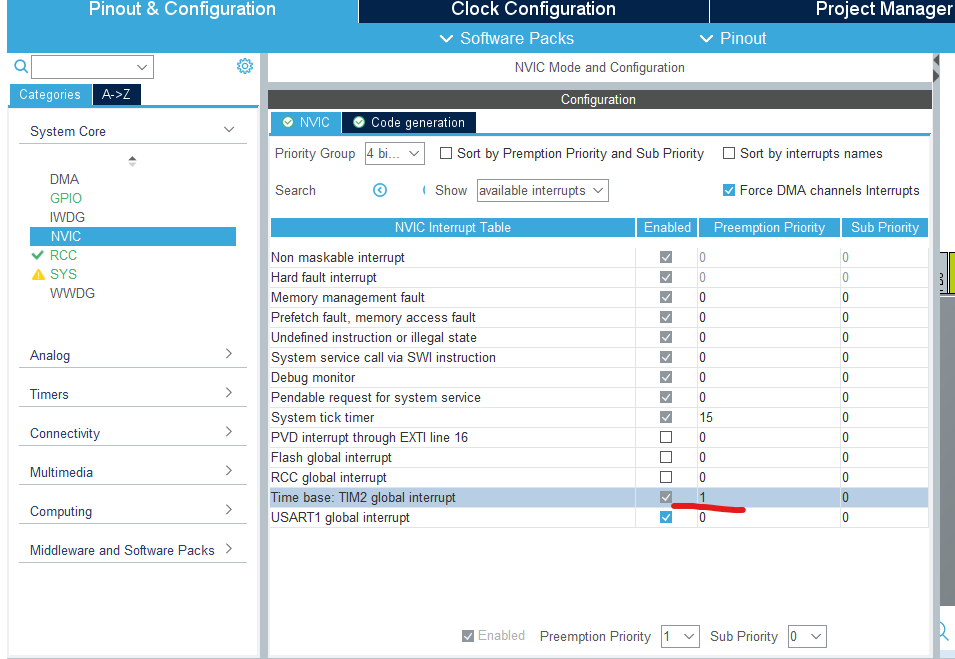
NVIC配置
屏蔽几个中断:SysTick中断,SVC中断,PendSV中断。
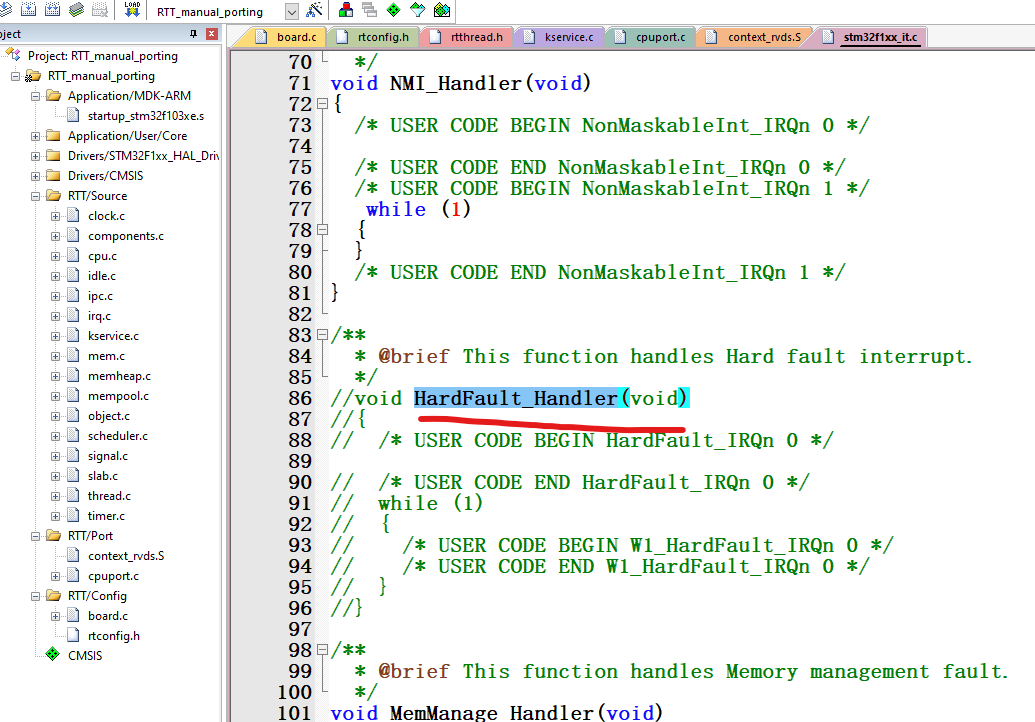
取消生成部分IRQ_handle。因为这一部分已经由FreeRTOS替我们实现
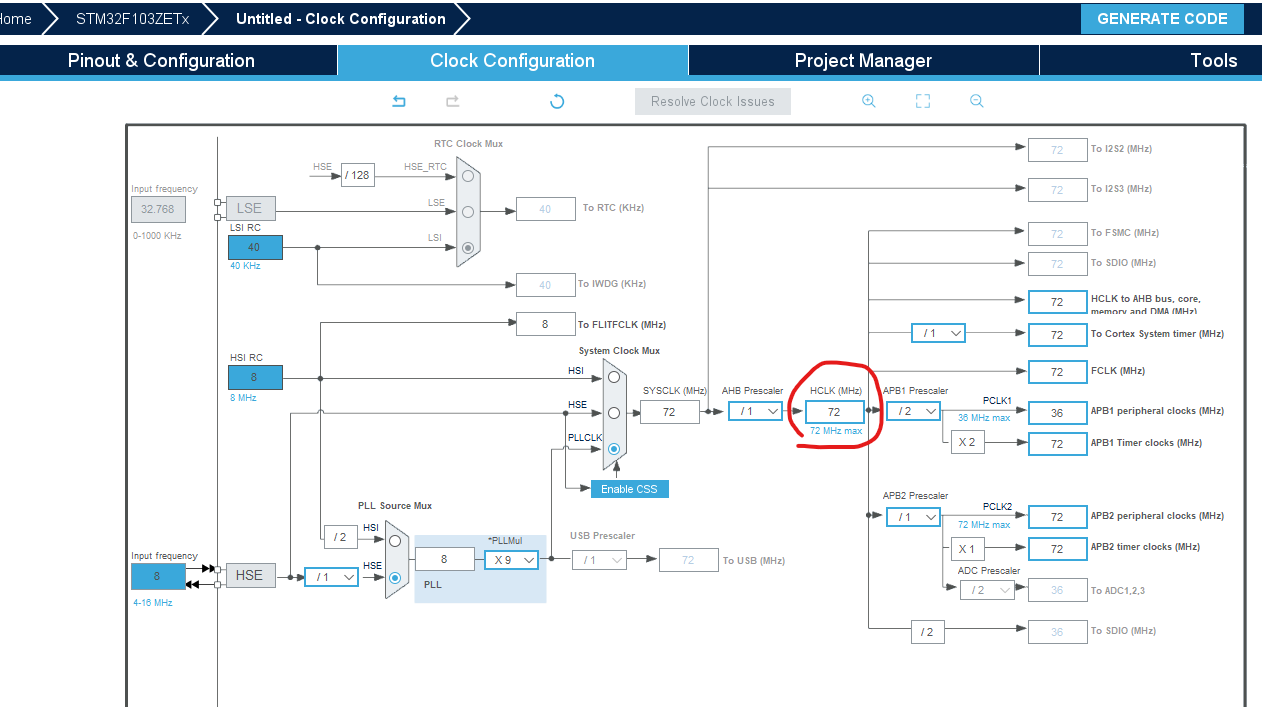
主频配置
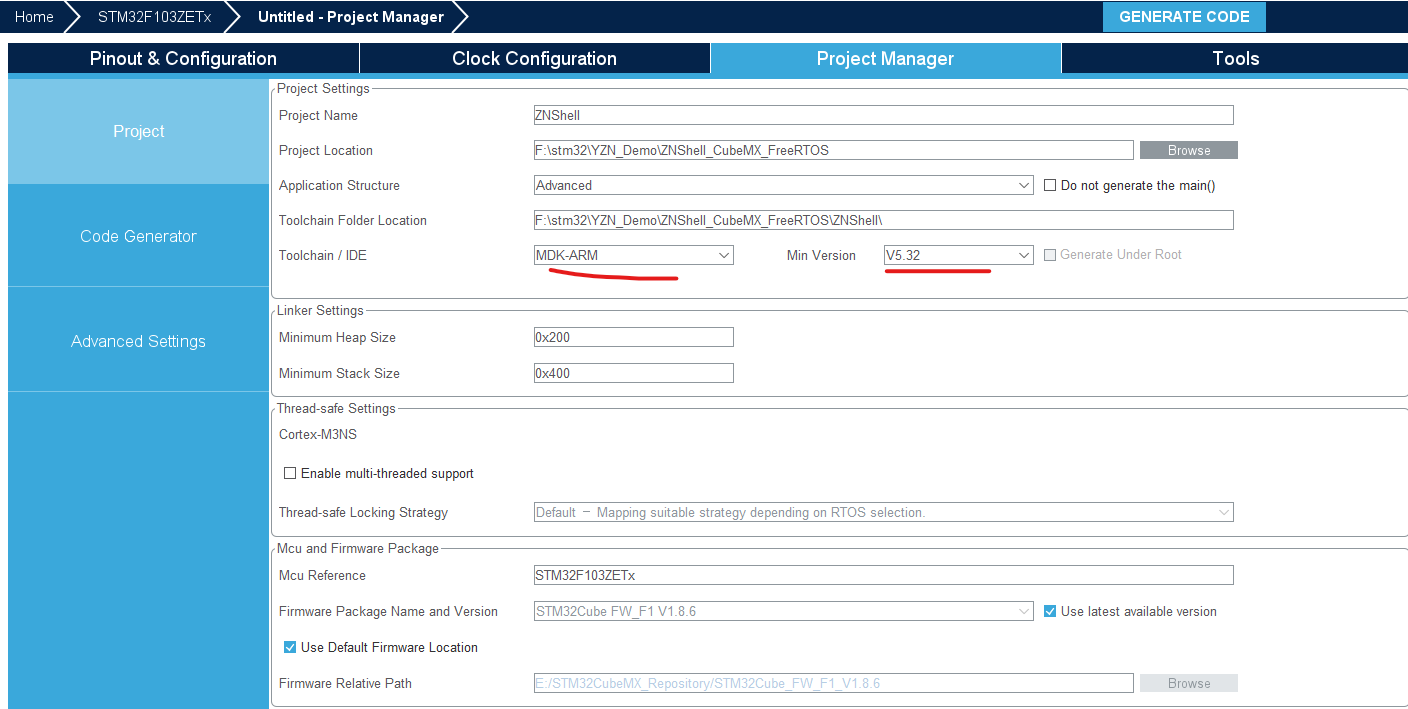
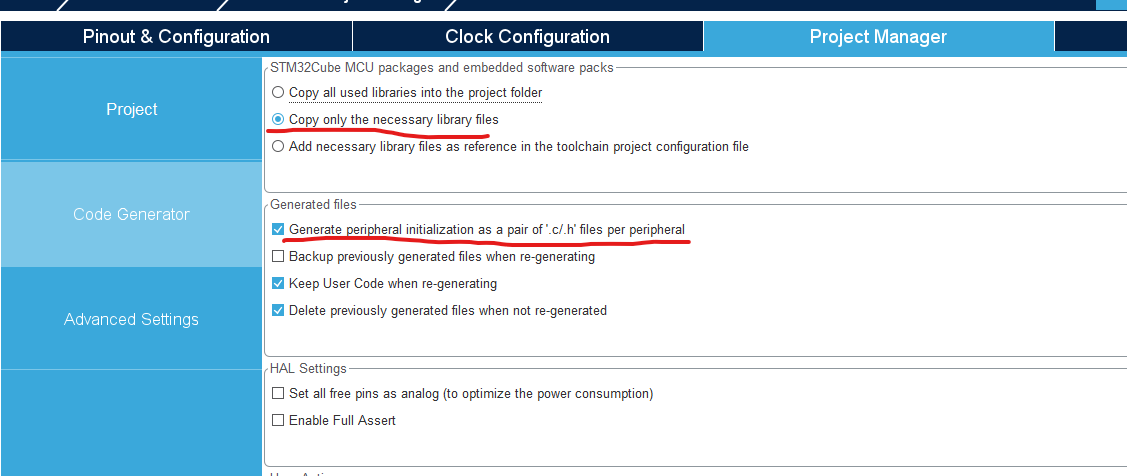
生成配置设置
添加配置和修改部分.c/.h
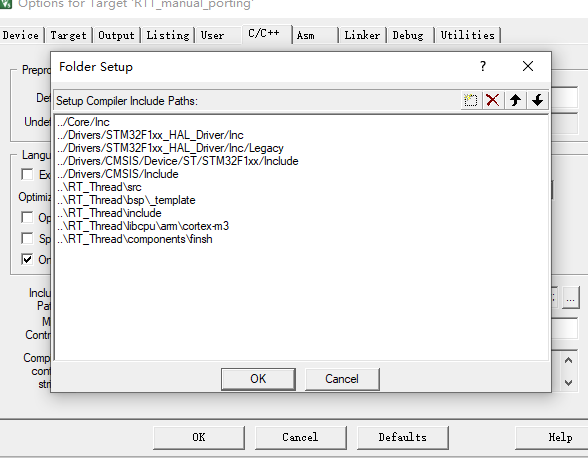
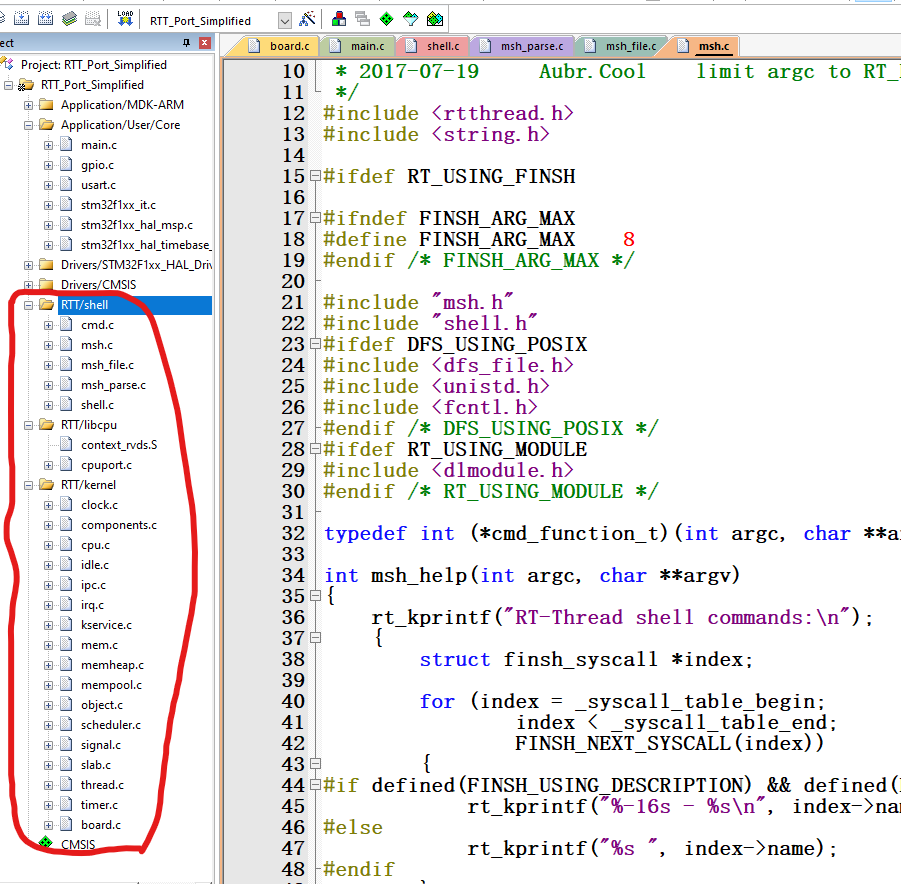
配置keil工程文件
添加源码到工程组
添加头文件
rtthread.h添加头文件
cpp
#include <stdarg.h>把HardFault_Handler也注释掉,因为RT-Thread已经为我们实现好了
修改部分.c/.h代码
rt_os_tick_callback换成
cpp
void SysTick_Handler(void)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}然后把rt_hw_console_output、rt_hw_board_init里的#error "TODO 1: OS Tick Configuration."之类的注释掉
rt_hw_board_init里增加HAL库的硬件初始化
cpp
extern void SystemClock_Config(void);
extern UART_HandleTypeDef huart1;
extern void MX_USART1_UART_Init(void);
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
// #error "TODO 1: OS Tick Configuration."
/*
* TODO 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
// 1. 初始化HAL库(CubeMX生成)
HAL_Init();
// 2. 配置系统时钟(CubeMX生成的时钟函数)
SystemClock_Config();
SystemCoreClockUpdate();
// 3. 初始化SysTick作为RT-Thread的时基
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}rtconfig.h
如果没有该宏定义,一定要自己添加。
cpp
defined(RT_USING_SMALL_MEM_AS_HEAP)main.c示例代码
cpp
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <rthw.h>
#include "rtthread.h"
#include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 定义线程控制块 */
static rt_thread_t led1_thread = RT_NULL;
static void led1_thread_entry(void *parameter)
{
while (1)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_5);
rt_thread_delay(500); /* 延时500个tick */
// printf("hello \r\n");
}
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
led1_thread = /* 线程控制块指针 */
rt_thread_create("led1", /* 线程名字 */
led1_thread_entry, /* 线程入口函数 */
RT_NULL, /* 线程入口函数参数 */
128, /* 线程栈大小 */
20, /* 线程的优先级 */
20); /* 线程时间片 */
/* 启动线程,开启调度 */
rt_thread_startup(led1_thread);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
rt_thread_delay(1000);
}
/* USER CODE END 3 */
}最后执行效果为led任务按照预期执行。
极简版移植
把CubeMX生成的RT-Thread第三方代码全部拷贝出来。
添加到需要自己的工程文件夹内,
对于不同系列或者架构的芯片,需要修改board.c和在RTT找到对应架构cpuport.c和对应的.S汇编文件。