摘要 ------本文提出了一种新的基于超像素的恒虚警率 (CFAR) 目标检测算法,用于高分辨率合成孔径雷达 (SAR) 图像。该检测算法包括三个阶段,即分割、检测和聚类。在分割阶段,利用超像素生成算法对 SAR 图像进行分割。在检测阶段,基于生成的超像素,可以自适应地估计每个像素的杂波分布参数,即使在多目标情况下也是如此。然后,可以采用双参数 CFAR 测试统计量进行检测。在聚类 阶段,使用层次 聚类 来对检测到的超像素进行聚类,以获得候选目标。该算法的有效性使用 miniSAR 数据进行了验证。
索引术语------恒虚警率 (CFAR),超像素,合成孔径雷达 (SAR),目标检测。
文章目录
-
-
-
- [Step 7](#Step 7)
- [C. Clustering Results](#C. Clustering Results)
-
-
尽管上述方法被广泛使用,但它们仍然存在一些缺点。
- 首先,仅基于像素强度,很难为待测像素准确地、自适应地选择杂波区域。
- 其次,来自同一目标的像素共享相同的背景杂波参数更为合理。然而,现有的 CFAR 方法没有考虑被测试的像素是否来自同一目标。是否是同一目标。
- 第三,在对检测结果进行聚类以获得候选目标时,没有任何结构信息,传统的基于像素的聚类方法通常无法区分来自相邻目标的像素。
所有这些缺点启发我们在 SAR 观测中采用一种在光学图像中广泛使用的技术,即超像素(superpixel)。
超像素是一个感知上有意义的局部相干区域;它可以揭示图像边界,并可用于计算局部图像特征 5。简单线性迭代聚类 (SLIC) 5 是一种超像素分割方法,在光学图像上表现出良好的性能。一些工作已经致力于使 SLIC 适应 SAR 图像 6, 7, 11。在 11 中,作者将 SLIC 应用于极化 SAR 图像,然后专注于提取超像素级特征用于船舶检测。他们表明,通过超像素分割,一个船舶目标可以被视为一个或多个连接区域,而不是一组像素。在这封信中,超像素将与双参数 CFAR 检测器相结合。我们将专注于利用超像素反映的结构信息,在多目标情况下自适应地选择杂波像素并消除来自相邻目标的像素,从而提高检测和聚类性能。
Step 7
基于二值检测结果,检测到的像素通常会进一步聚类到不同的簇中,以获得候选目标 4。聚类后,每个簇中心意味着一个目标位置。在 4 中,介绍了一种典型的聚类方法。当检测到的像素之间的距离小于目标的最大长度时,它会将这些像素聚类。然而,有时来自相邻目标的像素可能会被聚类成一个目标,这会降低其性能。
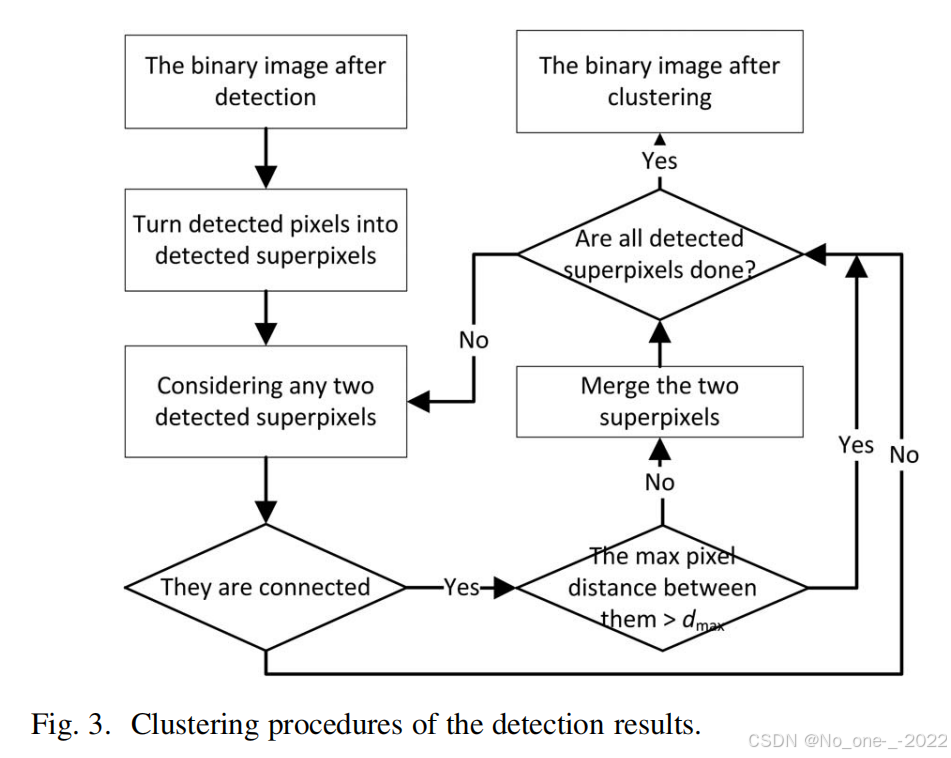
为了处理上述问题,我们首先将被检测像素转化为被检测超像素。对于每个超像素,如果其内部被检测像素数与总像素数的比率大于一个阈值 T R T_R TR ,它就被视为一个被检测超像素。否则,它被视为空 clutter (杂波)。较大的 T R T_R TR 会更好地减少虚警,但真实目标可能会丢失。实验表明,对于我们使用的数据, T R T_R TR 在 1 % , 5 % 1\\%, 5\\% 1%,5% 的范围内会产生令人满意的结果。因此,在所有测试中, T R T_R TR 被设置为 3%。
来自同一目标的被检测超像素大多是连接的,并且对于属于这些超像素的像素,最大像素距离应小于目标的最大长度 d m a x d_{max} dmax 。因此,基于层次聚类 12,该聚类算法在图 3 中进行了总结。
C. Clustering Results
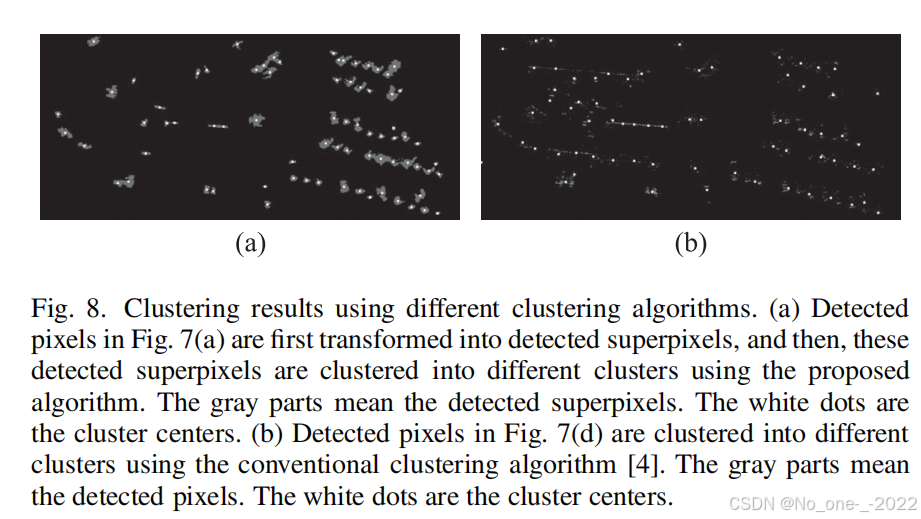
在这一部分,我们比较了所提出的算法和传统聚类算法 4 的聚类结果。这些结果如图 8 所示。在图 8(a) 中,灰色部分表示检测到的超像素,白点是簇中心。在图 8(b) 中,灰色部分表示检测到的像素,白点是簇中心。值得注意的是,图 8(b) 中的簇中心通常不在车辆上,并且簇中心的数量少于车辆的真实数量。然而,在图 8(a) 中,对于大多数车辆,每个车辆上都有一个唯一的簇中心,这与地面真实情况更加一致。改进的基于超像素的聚类结果可能归因于以下原因。
对于传统的聚类算法,如果两个被检测像素之间的距离小于目标的最大长度,即使这些像素来自不同的目标,它们也将会被聚类成一个簇,如图 8(b) 所示。结果,在多目标情况下其性能会下降。所提出的算法将检测到的像素转化为超像素,这部分地保留了车辆的形状。因此,它可以减少来自相邻目标的干扰并提高聚类性能。